多标线生成方法、装置、电子设备、介质及产品与流程
本技术涉及高精度地图,尤其涉及一种多标线生成方法、装置、电子设备、介质及产品。
背景技术:
1、在高精度地图制作领域,为了地图制作的准确性,需要高度还原道路的真实情况,而在真实道路中,多标线作为极其重要的要素之一,需要更精确的检测以及生成方法,多标线指的是多边形与常规标线印刷块相互组合的标线类型。
2、现有技术中,利用点云数据和图像数据之间对应的投影关系,如通过点云分割、点云矢量化提供多标线几何,以及相机图像分割提供类别属性来自动生成多标线,并借助人工标注的方式优化生成的多标线。
3、但是,上述方式需要依赖点云分割、点云矢量化以及图像分割,造成冗余节点较多,导致多标线生成效率较低,处理时间过长。
技术实现思路
1、本技术提供一种多标线生成方法、装置、电子设备、介质及产品,用于解决现有依赖点云分割、点云矢量化以及图像分割生成多标线,存在冗余节点较多,导致多标线生成效率较低,处理时间过长的问题。
2、第一方面,本技术提供一种多标线生成方法,所述方法包括:
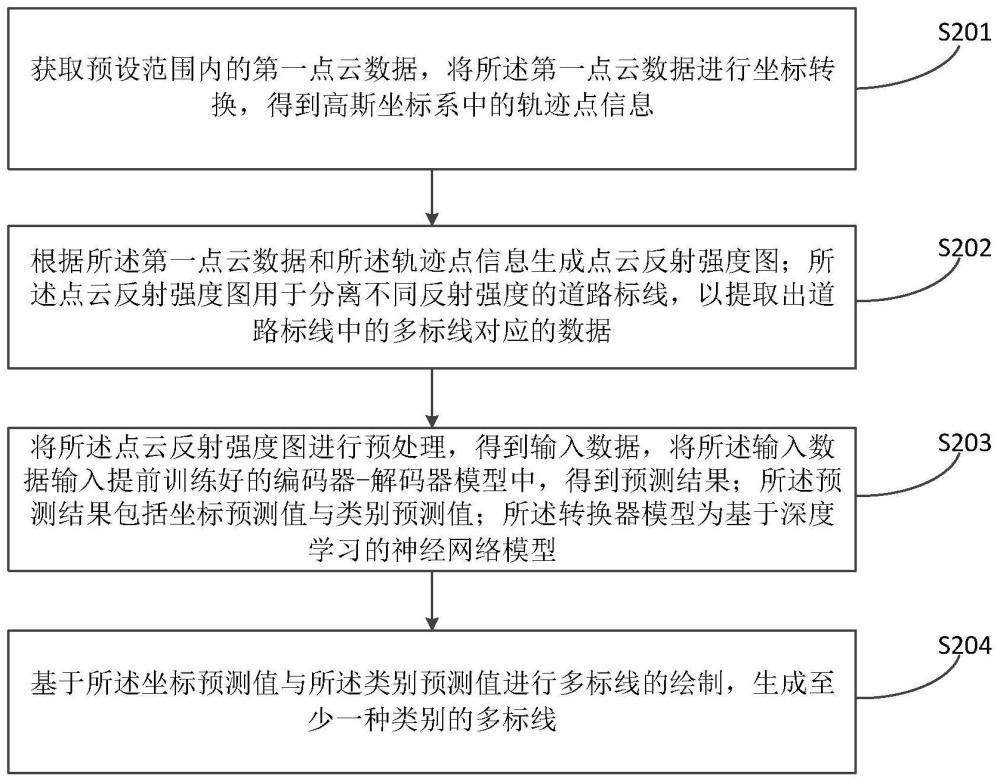
3、获取预设范围内的第一点云数据,将所述第一点云数据进行坐标转换,得到高斯坐标系中的轨迹点信息;
4、根据所述第一点云数据和所述轨迹点信息生成点云反射强度图;所述点云反射强度图用于分离不同反射强度的道路标线,以提取出道路标线中的多标线对应的数据;
5、将所述点云反射强度图进行预处理,得到输入数据,将所述输入数据输入提前训练好的编码器-解码器模型中,得到预测结果;所述预测结果包括坐标预测值与类别预测值;所述编码器-解码器模型为基于深度学习的神经网络模型;
6、基于所述坐标预测值与所述类别预测值进行多标线的绘制,生成至少一种类别的多标线。
7、可选的,获取预设范围内的第一点云数据,包括:
8、获取预设范围内的初始点云数据,基于所述初始点云数据的相邻点云数据计算误差值;
9、利用所述误差值对所述初始点云数据进行数值校准,得到第一点云数据。
10、可选的,根据所述第一点云数据和所述轨迹点信息生成点云反射强度图,包括:
11、获取所述点云反射强度图的分辨率,以及确定预设包围框数据;所述预设包围框数据为每次可处理的图像范围所包含的轨迹点信息;
12、将所述预设包围框数据基于第一算法进行坐标转换,得到世界坐标系下的包围框角点坐标;
13、遍历所述第一点云数据,并基于所述包围框角点坐标确定位于预设包围框内的第二点云数据;
14、将所述第二点云数据转换为车辆坐标系中的第三点云数据,基于所述分辨率对所述第三点云数据进行处理,生成点云反射强度图。
15、可选的,基于所述分辨率对所述第三点云数据进行处理,生成点云反射强度图,包括:
16、基于所述分辨率,将所述第三点云数据投影到图像像素坐标系中,得到第四点云数据和像素点坐标;
17、遍历所述像素点坐标,获取位于所述像素点坐标中第四点云数据的个数和点云反射强度;
18、基于所述个数和所述点云反射强度,利用第二算法计算得到点云强度均值;
19、基于所述点云强度均值确定目标像素点的像素值,基于所述目标像素点的像素值生成点云反射强度图。
20、可选的,基于所述点云强度均值确定目标像素点的像素值,包括:
21、基于所述点云强度均值,计算得到点云强度标准差;
22、基于所述点云强度均值和所述点云强度标准差,确定目标阈值;
23、当确定所述点云强度均值小于目标阈值,则基于第三算法计算得到目标像素点的像素值;
24、当确定所述点云强度均值大于或等于目标阈值,则确定目标像素点的像素值为预设值;所述预设值为提前定义的像素最大值。
25、可选的,所述第一算法对应的公式为:
26、
27、其中,(x,y,yaw)表示预设包围框数据在世界坐标系中的位姿;表示包围框角点坐标;h表示预设包围框的长度;w表示预设包围框的宽度;
28、所述第二算法对应的公式为:
29、
30、其中,counti,j表示位于像素点坐标(i,j)中第四点云数据的个数;{i}i,j表示位于像素点坐标(i,j)中的点云反射强度;imeani,j表示点云强度均值;
31、所述第三算法对应的公式为:
32、
33、其中,pixel表示目标像素点的像素值;max表示目标阈值。
34、可选的,将所述点云反射强度图进行预处理,得到输入数据,包括:
35、将所述点云反射强度图中的像素值进行归一化处理,得到输入数据。
36、可选的,所述方法还包括:
37、将所述预测结果发送至用户的终端设备,以使用户验证所述预测结果的准确性;
38、当所述预测结果出现错误时,获取用户对所述预测结果的修正数据,并基于所述修正数据进行多标线的绘制,生成至少一种类别的多标线;
39、将所述修正数据和所述输入数据输入到所述编码器-解码器模型中进行模型训练,得到训练好的编码器-解码器模型。
40、可选的,所述编码器-解码器模型的训练过程包括:
41、获取第一训练数据集;所述第一训练数据集包括多个训练样本;每一训练样本包括:点云强度图、所述点云强度图对应的多标线坐标与类别数据;
42、基于大型选择性内核网络lsknet从所述第一训练数据集中点云强度图中提取特征图;
43、利用所述特征图替换所述第一训练数据集中的点云强度图,得到第二训练数据集;
44、将所述第二训练数据集输入编码器-解码器模型中进行训练,得到训练好的编码器-解码器模型;所述编码器-解码器模型包括坐标回归多层感知机mlp网络和类别预测mlp网络。
45、可选的,将所述第二训练数据集输入编码器-解码器模型中进行训练,得到训练好的编码器-解码器模型,包括:
46、将所述第二训练数据集进行数据切分,得到训练样本集和测试样本集;将所述训练样本集输入编码器-解码器模型中进行训练,得到初始编码器-解码器模型;
47、将所述测试样本集中的特征图输入所述初始编码器-解码器模型中,预测得到第一坐标值与第一类别值;
48、利用匈牙利算法,查找所述第一坐标值和所述第一类别值对应的多标线坐标和类别数据;基于所述第一坐标值、所述第一类别值、所述多标线坐标与所述类别数据,利用损失函数计算得到损失函数值;
49、基于所述损失函数值更新所述初始编码器-解码器模型的参数,直至所述初始编码器-解码器模型的损失函数值满足预设条件,得到训练好的编码器-解码器模型。
50、第二方面,本技术还提供一种多标线生成装置,所述装置包括:
51、获取模块,用于获取预设范围内的第一点云数据,将所述第一点云数据进行坐标转换,得到高斯坐标系中的轨迹点信息;
52、第一生成模块,用于根据所述第一点云数据和所述轨迹点信息生成点云反射强度图;所述点云反射强度图用于分离不同反射强度的道路标线,以提取出道路标线中的多标线对应的数据;
53、输入模块,用于将所述点云反射强度图进行预处理,得到输入数据,将所述输入数据输入提前训练好的编码器-解码器模型中,得到预测结果;所述预测结果包括坐标预测值与类别预测值;所述编码器-解码器模型为基于深度学习的神经网络模型;
54、第二生成模块,用于基于所述坐标预测值与所述类别预测值进行多标线的绘制,生成至少一种类别的多标线。
55、第三方面,本技术还提供一种电子设备,包括:处理器,以及与所述处理器通信连接的存储器;
56、所述存储器存储计算机执行指令;
57、所述处理器执行所述存储器存储的计算机执行指令,以实现如第一方面中任一项所述的方法。
58、第四方面,本技术还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现如第一方面中任一项所述的方法。
59、第五方面,本技术还提供一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现如第一方面中任一项所述的方法。
60、综上所述,本技术提供一种多标线生成方法、装置、电子设备、介质及产品,可以通过获取图幅级的点云数据,即获取预设范围内的轨迹点的点云数据,进而读取每个轨迹点在高斯坐标系中的位姿信息,进一步的,利用点云数据与轨迹点的位姿信息生成点云反射强度图,该点云反射强度图可以反映具有高反射强度的道路标线,以提取出道路标线中的多标线对应的数据;进一步的,将点云反射强度图输入编码器-解码器模型中,预测得到多标线的坐标值与类别,进而基于多标线的坐标值与类别生成至少一种类别的多标线;这样,使用基于编码器-解码器模型的多标线矢量化方法替换原先的冗余节点,有便于系统维护,提高多标线的生成效率。
- 还没有人留言评论。精彩留言会获得点赞!