故障诊断模型的训练方法、计算机设备、以及介质与流程
本发明涉及数据处理,尤其涉及一种故障诊断模型的训练方法、计算机设备、以及介质。
背景技术:
1、滚动轴承是机械设备中非常重要的零部件,其主要功能是支撑机械旋转体,降低运动过程中的摩擦系数,并保证其回转精度,滚动轴承的健康状态对整个机械设备的性能、稳定性和使用寿命都有着巨大的影响。随着我国工业化水平的不断提高,机械设备在各行各业中的应用越来越广泛。由于工作环境的恶劣性和复杂性,滚动轴承是机械部件中最易于损坏的元件之一;同时由于滚动轴承故障难以直接观察,其运行状态正常或故障与否也很难通过简单的方式来判断。
2、在滚动轴承故障诊断初期,工程师借助工具使用耳朵根据经验进行故障判定,但是可靠性不高。
3、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供了一种故障诊断模型的训练方法、计算机设备、以及介质,旨在解决现有技术中依靠人工经验进行故障安定可靠性不高的问题。
2、为实现上述目的,本发明提供了一种故障诊断模型的训练方法,所述故障诊断模型的训练方法包括如下步骤:
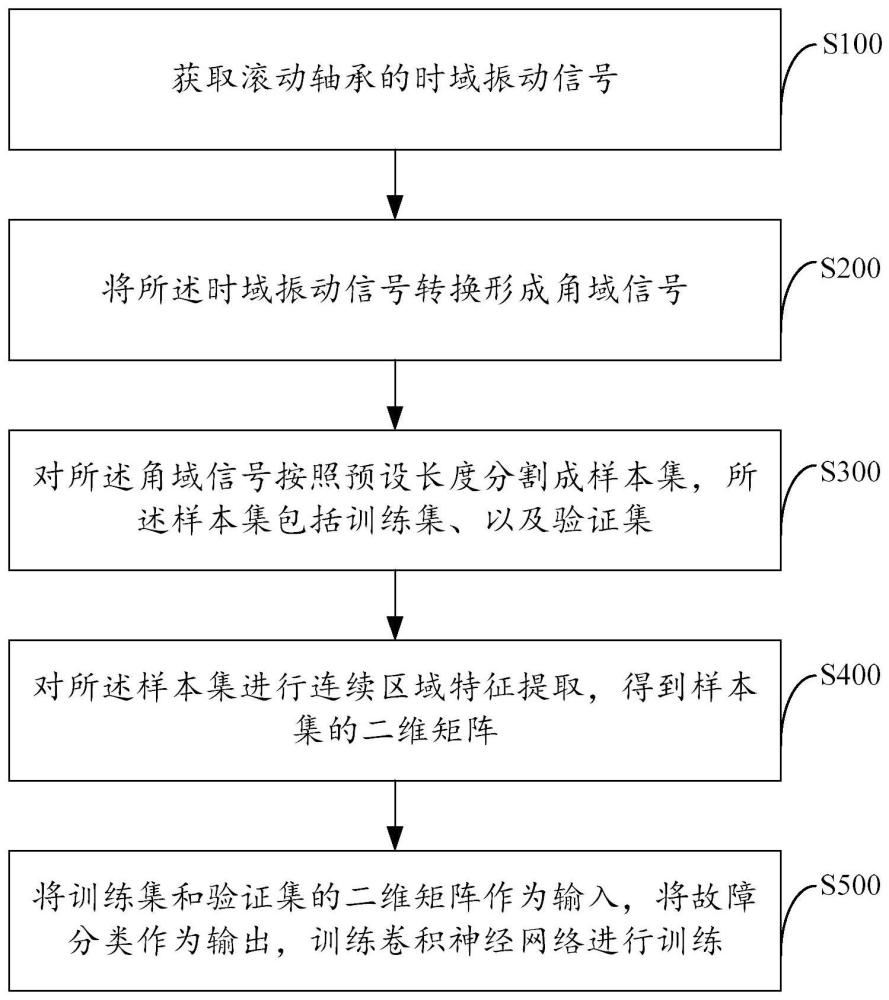
3、获取滚动轴承的时域振动信号;
4、将所述时域振动信号转换形成角域信号;
5、对所述角域信号按照预设长度分割成样本集,所述样本集包括训练集、以及验证集;
6、对所述样本集进行连续区域特征提取,得到样本集的二维矩阵;
7、将训练集和验证集的二维矩阵作为输入,将故障分类作为输出,训练卷积神经网络进行训练。
8、优选地,在所述故障诊断模型的训练方法中,所述对所述样本集进行连续区域特征提取,得到样本集的二维矩阵的步骤,具体包括:
9、使用预设的固定宽度的窗,使窗在样本集上按照预设步长滑动,每次滑动均使用区域特征统计方法对窗内的信号进行特征统计;
10、其中,
11、所述固定宽度为ωl;
12、ω为振幅区间宽度;
13、l为样本集的长度;
14、
15、max为样本集中所有样本的振幅最大值;
16、min为样本集中所有样本的振幅最小值。
17、优选地,在所述故障诊断模型的训练方法中,所述将所述时域振动信号转换形成角域信号的步骤,具体包括:
18、对所述时域振动信号中连续变转速振动信号,进行角域信号重采样形成角域信号;
19、对于固定转速振动信号不进行重采样。
20、优选地,在所述故障诊断模型的训练方法中,所述对所述时域振动信号中连续变转速振动信号,进行角域信号重采样形成角域信号的步骤,包括:
21、获取滚动轴承的转速信号;
22、根据所述转速信号,计算出旋转角度序列;
23、根据预设的角度间隔以及旋转角度序列,计算出对应的时间序列;
24、根据所述时间序列以及时域振动信号,插值求出角域信号。
25、优选地,在所述故障诊断模型的训练方法中,所述根据所述转速信号,计算出旋转角度序列的步骤,具体包括:
26、根据时域信号频率f,计算出间隔t,t=1/f;
27、根据间隔t对所述转速信号积分,求出第一时间间隔x对应旋转角度序列r;
28、相应地,所述根据预设的角度间隔以及旋转角度序列,计算出对应的时间序列的步骤,具体包括:
29、根据预设的角度间隔r,对旋转角度序列r分割形成角度序列o;
30、根据旋转角度序列r与第一时间间隔x的函数,插值求出角度序列o对应的第二时间间隔序列;
31、相应地,所述根据所述时间序列以及时域振动信号,插值求出角域信号的步骤,具体为:
32、根据第一时间间隔x与时域振动信号,插值求出第二时间间隔序列对应的角域信号。
33、优选地,在所述故障诊断模型的训练方法中,所述将训练集和验证集的二维矩阵作为输入,将故障分类作为输出,训练卷积神经网络进行训练的步骤中,所述卷积神经网络为六层结构的cnn结构,分别包括第一层至第六层;
34、其中,所述第一层包括输入层;第二层包括卷积核大小为3的卷积层、批量归一化层和激活层;
35、第三层包括卷积核大小为3的卷积层、批量归一化层、激活层、池化核为2的最大池化层;
36、第四层包括卷积核大小为3的卷积层、批量归一化层和激活层。第五层包含卷积核大小为3的卷积层、批量归一化层和激活层;
37、第六层分别包含全连接层、激活层、(1024-故障数目)的全连接层。
38、优选地,在所述故障诊断模型的训练方法中,所述样本集还包括测试集;
39、相应地,所述将训练集和验证集的二维矩阵作为输入,将故障分类作为输出,训练卷积神经网络进行训练的步骤之后,所述训练方法还包括:
40、采用测试集的二维矩阵,对训练好的卷积神经网络进行测试,得到测试结果;
41、判断测试结果是否达标;
42、当测试结果达标,故障诊断模型训练完成。
43、为了实现上述目的,本发明还提供一种故障诊断的方法,所述故障诊断的方法包括如下步骤:
44、获取滚动轴承的时域振动信号;
45、将所述时域振动信号输入训练好的故障诊断模型,输出故障类型;其中所述故障诊断模型采用如权利要求1至7任意一项所述的故障诊断模型的训练方法训练得到。
46、为了实现上述目的,本发明还提供一种计算机设备,所述计算机设备包括:
47、至少一个处理器;以及,
48、与所述至少一个处理器通信连接的存储器;其中,
49、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述的故障诊断模型的训练方法、和/或上述的故障诊断的方法。
50、为了实现上述目的,本发明还提供一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时实现上述的故障诊断模型的训练方法、和/或上述的故障诊断的方法。
51、本发明至少具有如下有益效果:
52、本发明提供故障诊断模型的训练方法,获取滚动轴承的时域振动信号;将所述时域振动信号转换形成角域信号;对所述角域信号按照预设长度分割成样本集,所述样本集包括训练集、以及验证集;对所述样本集进行连续区域特征提取,得到样本集的二维矩阵;将训练集和验证集的二维矩阵作为输入,将故障分类作为输出,训练卷积神经网络进行训练,可以准确诊断滚动轴承的故障。
53、进一步地,本发明通过采用连续区域特征提取方法结合卷积神经网络实现了变速工况下轴承故障的智能诊断,有别于传统基于信号处理方法的故障诊断技术,该方法计算局部信号的概率密度作为局部特征;角域信号重采样可以有效解决时变转速下振动数据采样不平衡的问题;而利用卷积神经网络的自适应特征提取的优势,消除了转速对故障诊断的影响。
54、进一步地,本发明提供的的故障诊断模型可以有效减少不同工况对故障诊断方法精度的影响。该方法面对更高转速,更剧烈转速变化工况下,依然保持有较高的准确度和稳定性,该方法完成了对高变转速和高转速范围工况下滚动轴承的故障诊断。
- 还没有人留言评论。精彩留言会获得点赞!