动作数据校正方法、装置、电子设备及存储介质与流程
本技术涉及计算机,具体涉及一种动作数据校正方法、装置、电子设备及存储介质。
背景技术:
1、动作捕捉是指记录并处理人或其它物体动作的技术,动作捕捉技术广泛应用于军事、娱乐、体育、医疗、机器人技术等诸多领域。当前的动作捕捉技术可以通过大量的惯性传感器进行动作捕捉,而穿戴大量的惯性传感器进行动作捕捉,会阻挡人体的动作,因此,无法适应动作复杂或包含大幅度动作的运动场景。如果减少惯性传感器的数量,则会存在难以准确计算出动作数据,从而导致动作数据生成的动作存在抖动、身体穿过地面等反物理现象。
技术实现思路
1、本技术实施例公开了一种动作数据校正方法、装置、电子设备及存储介质,能够减少虚拟对象的各身体节点的动作数据的误差,从而提高虚拟对象呈现动作的准确性。
2、本技术实施例公开一种动作数据校正方法,应用于电子设备,所述电子设备与路由器和n个惯性传感器通信连接,所述n为正整数,所述n个惯性传感器分别设置于n个穿戴设备上,所述n个穿戴设备用于穿戴在用户的不同身体部位;所述方法包括:
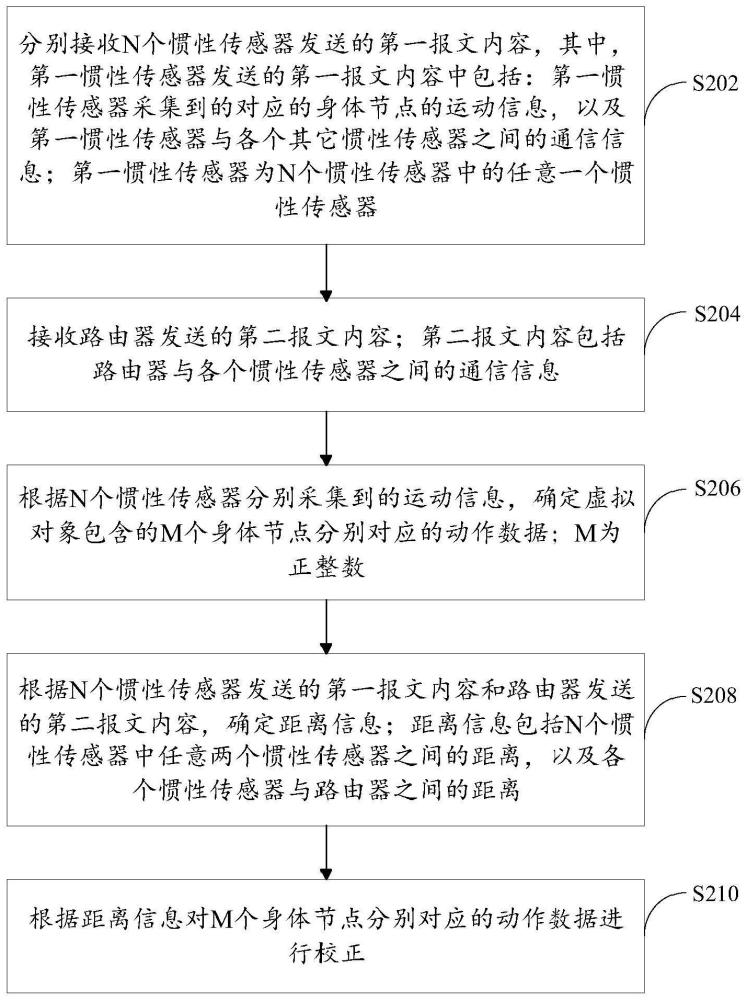
3、分别接收所述n个惯性传感器发送的第一报文内容,其中,第一惯性传感器发送的第一报文内容中包括:所述第一惯性传感器采集到的对应的身体节点的运动信息,以及所述第一惯性传感器与各个其它惯性传感器之间的通信信息;所述第一惯性传感器为所述n个惯性传感器中的任意一个惯性传感器;
4、接收所述路由器发送的第二报文内容;所述第二报文内容包括所述路由器与各个所述惯性传感器之间的通信信息;
5、根据所述n个惯性传感器分别采集到的运动信息,确定虚拟对象包含的m个身体节点分别对应的动作数据;所述m为正整数;
6、根据所述n个惯性传感器发送的第一报文内容和所述路由器发送的第二报文内容,确定距离信息;所述距离信息包括所述n个惯性传感器中任意两个惯性传感器之间的距离,以及各个所述惯性传感器与所述路由器之间的距离;
7、根据所述距离信息对所述m个身体节点分别对应的动作数据进行校正。
8、作为一种可选的实施方式,所述根据所述n个惯性传感器分别采集到的运动信息,确定虚拟对象包含的m个身体节点分别对应的动作数据,包括:
9、通过训练得到的动作回归模型根据所述n个惯性传感器分别采集到的运动信息,计算出所述虚拟对象包含的m个身体节点分别对应的身体节点角度、身体节点速度以及地面接触信息;其中,第一身体节点对应的身体节点角度用于指示所述第一身体节点与至少一个其它身体节点的相对角度,所述第一身体节点对应的身体节点速度用于指示所述第一身体节点在运动时的速度,所述第一身体节点对应的地面接触信息用于指示所述第一身体节点与虚拟空间中的地面的接触情况,所述第一身体节点为所述m个身体节点中的任一身体节点;
10、根据所述虚拟对象包含的m个身体节点分别对应的身体节点角度、身体节点速度以及地面接触信息,确定所述虚拟对象包含的m个身体节点分别对应的动作数据。
11、作为一种可选的实施方式,所述动作回归模型包括拼接单元及动作计算单元;所述根据所述n个惯性传感器分别采集到的运动信息,计算出所述虚拟对象包含的m个身体节点分别对应的身体节点角度、身体节点速度以及地面接触信息,包括:
12、通过所述拼接单元根据所述n个惯性传感器分别采集到的运动信息,计算出所述m个身体节点分别对应的初始位置坐标;
13、通过所述拼接单元将所述m个身体节点分别对应的初始位置坐标与所述n个惯性传感器分别采集到的运动信息进行拼接,得到第一拼接向量;
14、将所述第一拼接向量分别输入所述动作计算单元中的第一神经网络、第二神经网络及第三神经网络,通过所述第一神经网络根据所述第一拼接向量计算出所述虚拟对象包含的m个身体节点分别对应的身体节点角度,通过所述第二神经网络根据所述第一拼接向量计算出所述虚拟对象包含的m个身体节点分别对应的身体节点速度,以及通过所述第三神经网络根据所述第一拼接向量计算出所述虚拟对象包含的m个身体节点分别对应的地面接触信息。
15、作为一种可选的实施方式,所述动作回归模型中还包括距离计算单元;所述根据所述n个惯性传感器发送的第一报文内容和所述路由器发送的第二报文内容,确定距离信息,包括:
16、通过所述拼接单元将所述m个身体节点分别对应的初始位置坐标、所述n个惯性传感器发送的第一报文内容以及所述路由器发送的第二报文内容进行拼接,得到第二拼接向量;
17、通过所述距离计算单元中的第四神经网络根据所述第二拼接向量,计算所述距离信息。
18、作为一种可选的实施方式,在所述根据所述距离信息对所述m个身体节点分别对应的动作数据进行校正之前,所述方法还包括:
19、获取现实空间中的地面信息;
20、根据所述地面信息,确定地面高度数据;所述地面高度数据用于记录所述现实空间所在的地面与各个所述惯性传感器之间的距离;
21、根据所述地面高度数据对所述m个身体节点分别对应的地面接触信息进行校正,得到所述m个身体节点分别对应的校正后的地面接触信息;
22、所述根据所述虚拟对象包含的m个身体节点分别对应的身体节点角度、身体节点速度以及地面接触信息,确定所述虚拟对象包含的m个身体节点分别对应的动作数据,包括:
23、根据所述虚拟对象包含的m个身体节点分别对应的身体节点角度、身体节点速度以及校正后的地面接触信息,确定所述虚拟对象包含的m个身体节点分别对应的动作数据。
24、作为一种可选的实施方式,所述第一惯性传感器与各个其它惯性传感器之间的通信信息包含第一时间差,所述第一时间差为所述第一惯性传感器接收到所述各个其它惯性传感器最近一次发送的第一报文内容的接收时间点,与所述各个其它惯性传感器最近一次发送第一报文内容的发送时间点的差值;所述路由器与各个所述惯性传感器之间的通信信息包括第二时间差,所述第二时间差为所述路由器接收到各个所述惯性传感器最近一次发送的第一报文内容的接收时间点,与各个所述惯性传感器最近一次发送第一报文内容的发送时间点的差值;所述根据所述n个惯性传感器发送的第一报文内容和所述路由器发送的第二报文内容,确定距离信息,包括:
25、获取报文传输速度;
26、根据所述第一时间差、所述第二时间差以及所述报文传输速度,确定所述距离信息。
27、作为一种可选的实施方式,在所述根据所述距离信息对所述m个身体节点分别对应的动作数据进行校正之后,所述方法还包括:
28、根据所述m个身体节点分别对应的校正后的动作数据,计算出所述m个身体节点在下一帧分别对应的位置坐标。
29、本技术实施例公开一种动作数据校正装置,所述装置包括:
30、第一接收模块,用于分别接收所述n个惯性传感器发送的第一报文内容,其中,第一惯性传感器发送的第一报文内容中包括:所述第一惯性传感器采集到的对应的身体节点的运动信息,以及所述第一惯性传感器与各个其它惯性传感器之间的通信信息;所述第一惯性传感器为所述n个惯性传感器中的任意一个惯性传感器;
31、第二接收模块,用于接收所述路由器发送的第二报文内容;所述第二报文内容包括所述路由器与各个所述惯性传感器之间的通信信息;
32、动作数据确定模块,用于根据所述n个惯性传感器分别采集到的运动信息,确定虚拟对象包含的m个身体节点分别对应的动作数据;所述m为正整数;
33、距离信息确定模块,用于根据所述n个惯性传感器发送的第一报文内容和所述路由器发送的第二报文内容,确定距离信息;所述距离信息包括所述n个惯性传感器中任意两个惯性传感器之间的距离,以及各个所述惯性传感器与所述路由器之间的距离;
34、校正模块,用于根据所述距离信息对所述m个身体节点分别对应的动作数据进行校正。
35、本技术实施例公开一种电子设备,包括存储器及处理器,所述存储器中存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器实现本技术实施例公开的任意一种动作数据校正方法。
36、本技术实施例公开一种计算机可读存储介质,其存储计算机程序,其中,所述计算机程序被处理器执行时,实现本技术实施例公开的任意一种动作数据校正方法。
37、与相关技术相比,本技术实施例具有以下有益效果:
38、本技术实施例提供了一种动作数据校正方法、装置、电子设备及存储介质,分别接收n个惯性传感器发送的第一报文内容,其中,第一惯性传感器发送的第一报文内容中包括:第一惯性传感器采集到的对应身体节点的运动信息,以及第一惯性传感器与各个其它惯性传感器之间的通信信息;第一惯性传感器为n个惯性传感器中的任意一个惯性传感器;接收路由器发送的第二报文内容;第二报文内容包括路由器与各个惯性传感器之间的通信信息;根据n个惯性传感器分别采集到的运动信息,确定虚拟对象包含的m个身体节点分别对应的动作数据;m为正整数;根据n个惯性传感器发送的第一报文内容和路由器发送的第二报文内容,确定距离信息;距离信息包括n个惯性传感器中任意两个惯性传感器之间的距离,以及各个惯性传感器与路由器之间的距离;根据距离信息对m个身体节点分别对应的动作数据进行校正。
39、实施本技术实施例,通过n个惯性传感器采集到的运动信息,可以确定出虚拟对象包含的m个身体节点分别对应的动作数据,再根据n个惯性传感器发送的第一报文内容和路由器发送的第二报文内容,确定出距离信息,距离信息包含了n个惯性传感器中任意两个惯性传感器之间的距离,以及各个惯性传感器与路由器之间的距离,根据距离信息对虚拟对象的m个身体节点分别对应的动作数据进行校正,避免虚拟对象的m个身体节点分别对应的动作数据因缺少距离信息的约束而导致出现偏差,提高了m个身体节点分别对应的动作数据的准确性,使得虚拟对象所呈现的动作更符合物理现象,能够减少虚拟对象的各身体节点的动作数据的误差,从而提高虚拟对象呈现动作的准确性。
- 还没有人留言评论。精彩留言会获得点赞!