橡胶密封圈多类表面缺陷分类定位方法与流程
本发明涉及缺陷分类定位方法,更具体地说,涉及橡胶密封圈多类表面缺陷分类定位方法。
背景技术:
1、橡胶密封圈是许多工业产品和机械设备中不可或缺的部件,它们在确保密封性和防止液体或气体泄漏方面发挥着关键作用。因此,确保橡胶密封圈的质量至关重要,其中缺陷检测和定位是保证产品质量的关键环节。
2、橡胶密封圈的缺陷可能包括裂纹、刮痕、凹陷、气泡等多种类型,这些缺陷往往微小且难以用肉眼识别。此外,橡胶材料的非均质性和生产过程中的复杂性增加了检测的难度。准确地检测这些缺陷并确定它们的具体位置对于后续的质量控制和缺陷分析至关重要。
3、尽管现有技术已经能够在一定程度上进行缺陷检测,但仍存在以下不足之处:
4、1.准确性不足:传统的图像处理方法在处理复杂背景或微小缺陷时往往准确性不足,容易产生误判或漏判。
5、2.定位困难:现有技术在定位缺陷的具体位置方面通常效果有限,尤其是在缺陷尺寸较小或形状不规则时。
6、3.处理速度慢:一些高精度的检测方法处理速度较慢,不适合快速生产线的需求。
7、4.适应性差:对于不同类型的橡胶密封圈或不同的缺陷类型,现有技术的适应性和灵活性不足。
8、综上所述,现有技术在橡胶密封圈缺陷检测和定位方面存在明显的局限性,这促使我们开发出一种更高效、更准确、更适应性强的新技术来解决这些问题。
技术实现思路
1、1.要解决的技术问题
2、针对现有技术中存在的问题,本发明的目的在于提供橡胶密封圈多类表面缺陷分类定位方法,通过结合先进的图像处理技术、数学模型和机器学习算法,提供了一种全面且高效的解决方案,用于橡胶密封圈表面的多类缺陷分类定位。
3、2.技术方案
4、为解决上述问题,本发明采用如下的技术方案:
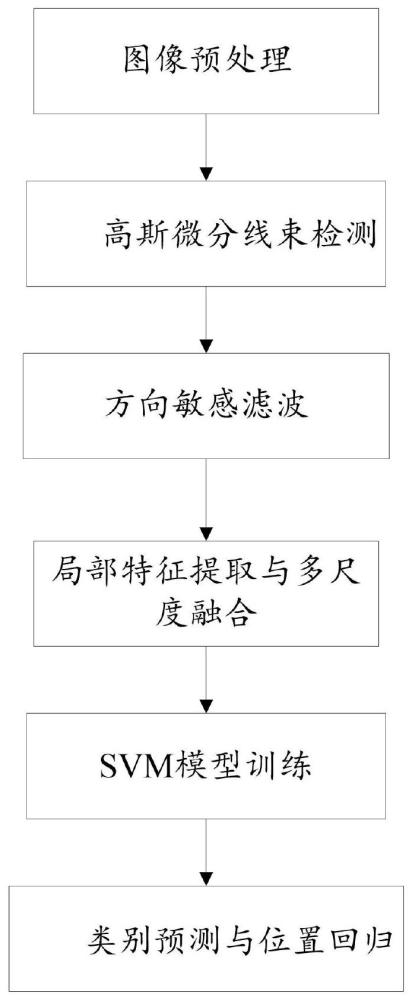
5、橡胶密封圈多类表面缺陷分类定位方法,包括以下步骤:
6、步骤1:图像预处理
7、对进行图像预处理,以增强缺陷区域和正常区域之间的视觉对比度,消除噪声并保护图像边缘,为后续步骤提供更清晰的图像;
8、步骤2:高斯微分线束检测
9、在预处理后的图像上,以识别可能存在缺陷的线束区域;通过hessian矩阵增强图像特征,便于识别细微缺陷。
10、步骤3:方向敏感滤波
11、对线束检测后的图像,增强特定方向的线束纹理,进一步增强图像中特定方向的特征,为缺陷分类提供更多信息;
12、步骤4:局部特征提取与多尺度融合
13、基于上述步骤的输出,提取局部特征,并结合多尺度线束信息,获取丰富的特征数据,为后续的分类模型提供输入;
14、步骤5:svm模型训练
15、训练支持向量机模型,通过优化分类和定位的损失函数,提高模型的准确性和鲁棒性;
16、步骤6:类别预测与位置回归
17、使用训练好的svm模型对检测图像进行缺陷类别预测,并给出具体区域位置;实现精确的缺陷分类与定位,为后续的质量控制和追溯提供依据。
18、所述步骤1采用算法(1)进行图像预处理,具体算法公式如下:
19、
20、其中,f(x,y)处理后的图像在位置(x,y)的像索值;f(i,j):为原始图像在位置(i,j)的像素值;σ为控制高斯滤波的平滑程度的参数;β为控制边缘保持强度的参数;z(x,y)为归一化因子,确保处理后的像素值在合理范围内;为高斯函数,用于平滑图像,减少噪声影响;为sigmoid函数,用于保持边缘信息。
21、所述步骤1的具体过程如下:
22、初始化:设定σ和β的值;
23、遍历图像:对于图像中的每个像素点(x,y),执行以下计算;
24、应用高斯滤波:计算以(x,y)为中心的高斯加权平均;
25、边缘保持:使用sigmoid非线性函数调整每个像素的贡献,以保持边缘;归一化处理:使用z(x,y)对结果进行归一化处理;
26、其中,输入数据为原始的图像数据,通常为数字图像格式,jpeg、png;
27、图像数据来源于橡胶密封圈的生产线或质量检测站;
28、预处理步骤:包括图像格式转换、尺寸调整基本图像处理步骤。
29、独特的滤波组合:结合了高斯滤波和非线性动力学系统,提供了一种新颖的图像预处理方法。
30、边缘保持能力:算法特别强调在噪声消除的同时保持图像边缘,这对于后续的缺陷检测至关重要。
31、算法(1)特别适用于在复杂背景下的缺陷检测,能够有效地增强缺陷与背景之间的对比度,同时保持缺陷边缘的清晰度,为后续的分类和定位任务提供了理想的输入。为橡胶密封圈表面缺陷检测提供了一个强大的图像预处理工具,通过独特的滤波技术和边缘保持策略,显著提高了后续缺陷检测步骤的准确性和效率。
32、所述步骤2采用算法(2),具体算法公式如下:
33、
34、其中,δf为拉普拉斯算子,用于测量图像在点(x,y)的弯曲程度;fxx,fyy,fxy为图像在点(x,y)的二阶偏导数,分别代表图像在x和y方向的曲率;λ1,λ2为调整参数,用于控制偏导数对最终结果的贡献。
35、所述步骤2包括以下步骤:
36、输入:经过步骤1处理的图像;
37、输出:经过hessian矩阵处理的图像,突出了特定的特征;
38、具体的计算过程如下:
39、计算二阶偏导数:对于图像中的每个像素点(x,y),计算fxx,fyy,fxy;
40、应用拉普拉斯算子:计算δf;
41、构建hessian矩阵:根据算法(2)的公式构建矩阵;
42、分析特征:通过分析hessian矩阵的特性,来识别和增强图像中的特定特征。
43、高斯微分线束检测:这种方法特别适用于检测图像中的细微边缘和纹理,这对于缺陷检测至关重要。
44、结构特征增强:通过hessian矩阵的分析,能够有效地增强图像中的结构特征,提高缺陷识别的准确性。
45、算法(2)特别适用于在复杂背景下的缺陷检测,能够有效地识别和增强图像中的线束状结构,为后续的分类和定位任务提供了关键的结构信息。
46、所述步骤3采用算法公式(3),具体算法公式如下:
47、
48、其中,g(x,y):为处理后的图像在位置(x,y)的像素值;σ为控制高斯滤波的平滑程度的参数;k为波数,与纹理的频率相关;θ为方向角,决定了滤波器增强的方向;为普朗克常数,引入量子力学概念;m为粒子质量,用于调节量子力学因子;ω为角频率,与纹理的周期性相关;为高斯函数,用于局部平滑图像,减少噪声影响;ei(kxcosθ+kysinθ)为复指数函数,代表波的传播,用于增强特定方向的特征;为量子力学中的因子,用于调制波的幅度;是普朗克常数,m是粒子质量,ω是角频率。
49、所述步骤3包括以下步骤:
50、输入:经过步骤2处理的图像;
51、输出:经过gabor滤波处理的图像,突出了特定方向的特征;
52、具体的计算过程如下:
53、遍历图像:对于图像中的每个像素点(x,y),执行以下步骤;
54、应用高斯函数:计算以(x,y)为中心的高斯加权平均;
55、应用复指数函数:增强图像中特定方向的特征;
56、应用量子力学因子:调制波的幅度,进一步增强特定特征。
57、方向敏感的特征增强:通过结合高斯函数和复指数函数,可以更精确地增强图像中特定方向的特征。
58、量子力学因子的应用:引入的量子力学因子可能提供了一种新的方式来调制和增强图像特征。
59、算法公式(3)特别适用于在复杂背景下的缺陷检测,能够有效地增强图像中特定方向的线束纹理,为后续的分类和定位任务提供了关键的视觉信息。算法公式(3)为橡胶密封圈表面缺陷检测提供了一个强大的方向敏感滤波工具,通过精确的gabor滤波和量子力学因子调制,显著提高了对特定方向纹理的识别能力,这一步骤与前两步的结果紧密衔接,确保了整个检测流程的高效性和准确性。
60、所述步骤4采用算法公式(4),具体算法公式如下:
61、
62、其中,fmulti(x,y)为多尺度融合后的特征表示;s,t为尺度和特征类型的数量;ws,t为权重因子,用于平衡不同尺度和特征类型的贡献;γ,α,δ为调节参数,用于控制非线性变换的强度;gs,t(x,y)为在尺度s和特征类型t下的gabor滤波响应;hs,t(x,y)为在尺度s和特征类型t下的hessian矩阵响应;
63、输入:经步骤3处理的图像的像素数据;
64、输出:多尺度融合特征表示;具体过程如下:
65、初始化参数:设定s,t,γ,α,δ和ws,t;
66、多尺度特征提取:对每个尺度s和特征类型t,提取gabor滤波和hessian矩阵响应;
67、特征融合:将不同尺度和类型的特征通过加权和非线性变换进行融合;
68、生成特征表示:形成最终的多尺度融合特征表示fmulti(x,y)。
69、创新的特征融合方法:结合了多尺度分析和复杂网络理论,提供了一种新颖的方式来处理和融合图像特征。
70、非线性特征变换:通过sigmoid和log函数的应用,增强了特征的表达能力和区分度。
71、算法公式(4)特别适用于在复杂背景下的缺陷检测,能够有效地提取和融合多尺度特征,为后续的分类和定位任务提供了丰富且有区分力的特征表示;步骤4通过创新的多尺度特征提取与融合算法,为橡胶密封圈表面缺陷检测提供了一个强大的特征表示工具;这一步骤与前三步的结果紧密衔接,确保了整个检测流程的高效性和准确性;通过这种方法,我们能够更全面地捕获图像中的关键信息,从而提高分类和定位的准确率。
72、所述步骤5采用算法公式(5),具体算法公式如下:
73、
74、其中,为交叉熵损失函数,用于分类任务;yo,c是真实类别标签,po,c是预测概率;是平滑l1损失函数,用于定位任务;和分别是预测和真实位置向量;ω1,ω2为权重因子,用于平衡分类损失和定位损失;
75、输入数据为步骤4中生成的多尺度融合特征;
76、数据来源:图像数据来源于橡胶密封圈的生产线或质量检测站;
77、预处理步骤:包括图像的噪声消除、边缘保护、特征增强和多尺度融合;具体过程如下:
78、初始化模型:设置svm模型的参数;
79、准备数据:使用步骤4中的多尺度融合特征作为输入数据;
80、定义损失函数:根据算法公式(5)定义损失函数;
81、模型训练:使用损失函数训练svm模型;
82、参数调整:通过交叉验证等方法调整ω1,ω2和其他模型参数;
83、模型评估:评估模型在训练集和验证集上的性能。
84、创新的损失函数结合了分类准确性和定位精度的优化,适用于复杂的缺陷检测任务;多尺度特征的应用,利用多尺度融合特征,提高了模型对不同尺寸和形状缺陷的识别能力。此步骤通过优化损失函数,提高了svm模型在橡胶密封圈表面缺陷检测任务中的准确性和鲁棒性;结合多尺度特征,模型能够更有效地识别和定位各种类型的缺陷。
85、所述步骤6具体过程如下:
86、加载模型:加载经过步骤5训练的svm模型;
87、数据准备:准备待检测图像的特征数据,这些数据应与训练模型时使用的特征相同;
88、类别预测:使用svm模型对每个图像区域进行分类,以确定是否存在缺陷及其类别;
89、位置回归:对于分类为缺陷的区域,使用svm模型进行位置回归,以确定缺陷的具体位置;
90、结果输出:输出缺陷类别和位置信息,供后续分析和决策使用;
91、svm模型表示为:
92、
93、其中,f(x)是预测函数;αi是支持向量的系数;yi是训练样本的标签;k(xi,x)是核函数,用于将数据映射到高维空间,b是偏置项。
94、输入数据为待检测图像的特征数据,这些数据应与训练模型时使用的特征相同;图像数据来源于橡胶密封圈的生产线或质量检测站。
95、预处理步骤包括图像的噪声消除、边缘保护、特征增强和多尺度融合,这些步骤已在前几步中完成。使用与训练阶段相同的模型参数,包括核函数类型、正则化参数等;确保测试阶段的特征与训练阶段的特征保持一致;在实际应用前,应评估模型在独立测试集上的性能,包括分类准确率和定位精度。
96、这一步骤独特地结合了分类和回归任务,提高了缺陷检测的全面性和准确性;通过位置回归,模型能够精确地确定缺陷的具体位置,这对于后续的质量控制和追溯至关重要。
97、此步骤通过精确的类别预测和位置回归,为橡胶密封圈表面缺陷检测提供了强大的支持。这不仅提高了缺陷检测的准确性,还为后续的质量控制和追溯提供了重要信息。
98、步骤6是橡胶密封圈表面缺陷检测方案的关键部分,它利用训练有素的svm模型实现了缺陷的精确分类和定位;这一步骤与前面的步骤紧密衔接,确保了整个检测流程的高效性和准确性;通过这种方法,我们能够在复杂的工业环境中实现高精度的缺陷检测,为质量控制和追溯提供了可靠的数据支持。
99、3.有益效果
100、相比于现有技术,本发明的优点在于:
101、1.提高橡胶密封圈缺陷检测的准确性和效率,通过使用高级图像处理技术和数学模型,本发明能够更有效地处理和分析图像数据;特别是在处理具有复杂背景和细微特征的橡胶密封圈图像时,这些算法公式能够显著提高缺陷检测的准确性。
102、2.多尺度特征融合:通过结合多尺度分析,本发明能够捕获从粗糙到细致的图像信息,从而提高对不同尺寸和形状缺陷的识别能力。
103、3.精确的分类与定位:结合分类和回归任务:本发明不仅能够准确地分类橡胶密封圈图像中的缺陷,还能够精确地定位缺陷的具体位置。这对于后续的质量控制和追溯至关重要。
104、4.优化的损失函数:通过使用特定设计的损失函数,本发明在训练过程中能够有效地平衡分类准确性和定位精度。
105、5.高度适应性和灵活性,本发明提供的算法公式中包含多个可调整的参数,使得模型能够适应不同的数据特征和需求。
106、6.适用于复杂环境,提高效率,减少人工干预:由于其高度的适应性,本发明特别适用于在复杂工业环境中进行高精度的橡胶密封圈的缺陷检测;本发明通过自动化的图像处理和分析,能够快速识别和定位橡胶密封圈的缺陷,从而提高生产线的效率减少对人工检查的依赖,降低了人为错误的可能性,同时提高了整体的检测速度和可靠性。
107、综上所述,本发明通过结合先进的图像处理技术、数学模型和机器学习算法,提供了一种全面且高效的解决方案,用于橡胶密封圈表面的多类缺陷检测。这种方法不仅提高了检测的准确性,还提高了处理速度,使其成为工业质量控制中的重要工具,本发明的方法能够显著提高生产效率和产品质量。
- 还没有人留言评论。精彩留言会获得点赞!