一种面向旋转激光定位系统的信号识别与干扰滤除方法
本发明属于电子信息信号分离,涉及一种信号识别与干扰滤除方法,尤其是一种面向旋转激光定位系统的信号识别与干扰滤除方法。
背景技术:
1、旋转激光定位系统是一种用于工业、工程等测量定位现场的大尺寸空间三维坐标测量技术,该系统主要由激光发射基站、光电接收器、信号处理器和上位机组成。测量时,需在被测物体一侧布置多台激光发射基站(通常为4台),每台激光发射基站周期性地发出一次基准(同步光,也就是,基准脉冲信号)和两个扇面激光(扫描光,也就是,扇面脉冲信号),扇面激光的姿态关系固定不变,共同在整个测量空间内旋转扫描形成激光网络,每次转过初始位置时基准触发。光电接收器获取到混合激光信号后借助信号处理器对其进行识别和分离,通过特征时间解算出特征角度,从而解得测量点的空间坐标。
2、传统的信号识别方式需要提前录入基准与扇面的脉宽门限,将每个信号的脉宽与门限范围进行比对,分别辨识出基准脉冲信号与扇面脉冲信号。然而,在实际应用中,由于光电接收器与发射机站的距离不同,基准与扇面脉冲信号的脉宽变化范围会有重叠。于是,在某些特定的距离范围内,提前录入的脉宽门限值会失效,导致信号识别错误。
3、与此同时,传统的算法未考虑对干扰的滤除,这会导致,当扇面激光被反射到光电接收器并被获取为脉冲信号时,系统将无法正确识别出扇面脉冲信号,从而使得角度和坐标解算异常。
4、鉴于现有技术的上述技术缺陷,迫切需要研制一种新型的信号识别与干扰滤除方法。
技术实现思路
1、本发明的目的在于克服现有技术中存在的缺点,提出一种面向旋转激光定位系统的信号识别与干扰滤除方法,其能将混合激光信号自适应地识别为基准脉冲信号与扇面脉冲信号,同时实现对常见干扰的滤除,提高系统算法的容错,增加环境实用性。
2、为了实现上述目的,本发明提供如下技术方案:
3、一种面向旋转激光定位系统的信号识别与干扰滤除方法,其特征在于,包括以下步骤:
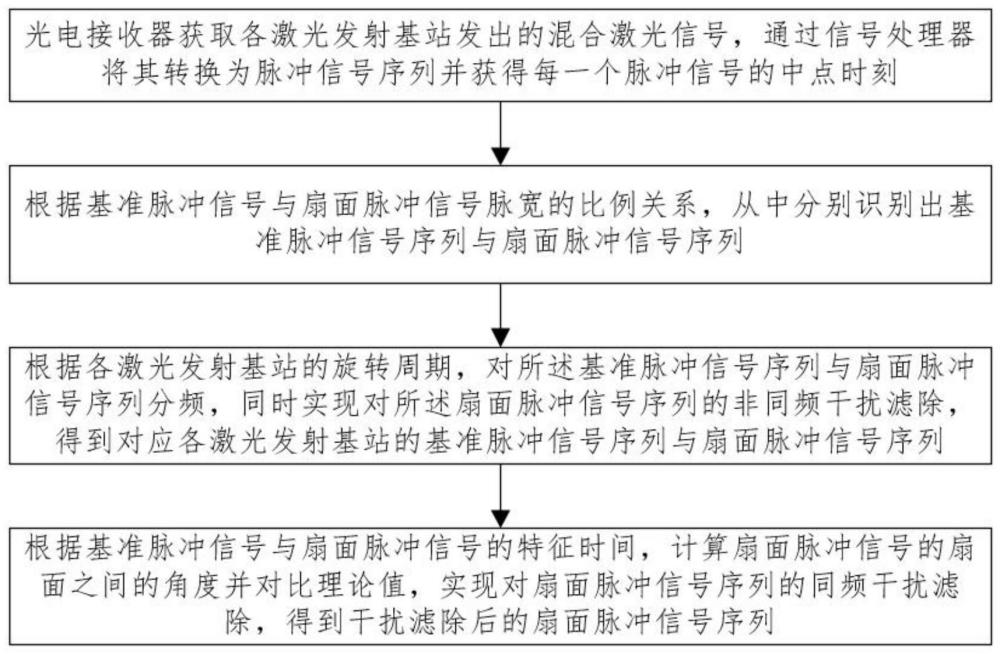
4、1)、光电接收器获取各激光发射基站发出的混合激光信号,通过信号处理器将其转换为脉冲信号序列x(t)并获得每一个脉冲信号的中点时刻;
5、2)、根据基准脉冲信号与扇面脉冲信号脉宽的比例关系,从x(t)中分别识别出基准脉冲信号序列r(t)与扇面脉冲信号序列p″(t);
6、3)、根据各激光发射基站的旋转周期,对所述基准脉冲信号序列r(t)与扇面脉冲信号序列p″(t)分频,同时实现对所述扇面脉冲信号序列p″(t)的非同频干扰滤除,得到对应各激光发射基站的基准脉冲信号序列rid(t)与扇面脉冲信号序列pi′d(t);
7、4)、根据基准脉冲信号与扇面脉冲信号的特征时间,计算扇面脉冲信号的扇面之间的角度并对比理论值,实现对扇面脉冲信号序列pi′d(t)的同频干扰滤除,得到干扰滤除后的扇面脉冲信号序列pid(t)。
8、优选地,所述步骤1)具体为:
9、1.1)、光电接收器和信号处理器通过光电转换和二值化将所述混合激光信号转换为一个脉冲信号序列x(t),并依次记录所述脉冲信号序列x(t)中每一个脉冲信号的上升沿时间xi以及脉宽wi,且xi>>wi,其中i=1,2,3…m,m为混合激光信号中脉冲信号的个数;
10、1.2)、计算ti=xi+wi/2,其中ti表示每一个脉冲信号的中点时刻。
11、优选地,所述步骤2)具体为:
12、2.1)、初始化变量,令i=1,j=2,k=3,w_real=0,其中变量w_real用于实时更新基准脉宽,设置扇面脉冲信号脉宽与基准脉冲信号脉宽的比例ratio_pr,基准脉冲信号脉宽与扇面脉冲信号脉宽的比例ratio_rp,基准脉冲信号脉宽之间的比例ratio_rr,以及脉冲信号识别时所允许的比例规律最大误差偏移量ratio_pr_offset、ratio_rp_offset、ratio_rr_offset;
13、2.2)、计算wj/wi,若满足|wj/wi-ratio_pr|≤ratio_pr_offset,转步骤2.3),若满足|wj/wi-ratio_rp|≤ratio_rp_offset,转步骤2.4),若都不满足,转步骤2.5);
14、2.3)、认定wi属于基准脉冲信号脉宽并以r(t)记录此脉宽中点时刻ti,认定wj属于扇面脉冲信号脉宽并以p″(t)记录此脉宽中点时刻tj,令w_real=wi,转步骤2.6);
15、2.4)、认定wj属于基准脉冲信号脉宽并以r(t)记录此脉宽中点时刻tj,认定wi属于扇面脉冲信号脉宽并以p″(t)记录此脉宽中点时刻ti,令w_real=wj,转步骤2.6);
16、2.5)、令i=i+1,j=j+1,k=k+1返回步骤2.2);
17、2.6)、计算wk/w_real,若满足|wk/w_real-ratio_rr|≤ratio_rr_offset,转步骤2.7),若满足|wk/w_real-ratio_pr|≤ratio_pr_offset,转步骤2.8),若都不满足,转步骤2.9);
18、2.7)、认定wk属于基准脉冲信号脉宽并以r(t)记录此脉宽中点时刻ti,令w_real=wk,转步骤2.9);
19、2.8)、认定wk属于扇面脉冲信号脉宽并以p″(t)记录此脉宽中点时刻ti,转步骤2.9);
20、2.9)、令k=k+1,判断k是否大于m,若否,转步骤2.6),若是,转步骤2.10);
21、2.10)、保存r(t)、p″(t),其中r(t)包含所有基站的基准脉冲信号脉宽中点时刻,p″(t)包含所有基站的扇面脉冲信号脉宽中点时刻以及非同频和同频干扰。
22、优选地,所述步骤2.1)中,ratio_rr=1,ratio_pr_offset=0.05、ratio_rp_offset=0.002、ratio_rr_offset=0.1。
23、优选地,所述步骤3)具体为:
24、3.1)、初始化变量,令l=1,m=2,n=3,id=1,其中id代表激光发射基站的序号,记r_max、p″_max分别为序列r(t)、p″(t)中的脉冲信号个数,设置激光发射基站的数量n且各自的周期为t1,t2,t3…tn,并设置分频与干扰滤除时所允许的周期最大误差偏移量t_offset;
25、3.2)、计算tm-tl、tn-tm,其中tl、tm、tn分别表示序列r(t)中的第l个、第m个、第n个中点时刻,若满足|tm-tl-tid|≤t_offset&&|tn-tm-tid|≤t_offset,转步骤3.3),若不满足,转步骤3.6);
26、3.3)、认定tl为属于第id个激光发射基站的基准并以rid(t)记录;
27、3.4)、令l=l+1,m=l+1,n=l+2,判断l是否大于r_max-2,若否,转步骤3.2),若是,转步骤3.7);
28、3.5)、令m=m+1,n=m+1,判断m是否大于r_max-1,若否,转步骤3.2),若是,转步骤3.4);
29、3.6)、令n=n+1,判断n是否大于r_max,若否,转步骤3.2),若是,转步骤3.5);
30、3.7)、计算tm-tl、tn-tm,其中tl、tm、tn分别表示序列p″(t)中的第l个、第m个、第n个中点时刻,若满足|tm-tl-tid|≤t_offset&&|tn-tm-tid|≤t_offset,转步骤3.8),若不满足,转步骤3.11);
31、3.8)、认定tl为属于第id个激光发射基站的扇面并以p′id(t)记录;
32、3.9)、令l=l+1,m=l+1,n=l+2,判断l是否大于p″_max-2,若否,转步骤3.7),若是,转步骤3.12);
33、3.10)、令m=m+1,n=m+1,判断m是否大于p″_max-1,若否,转步骤3.7),若是,转步骤3.9);
34、3.11)、令n=n+1,判断n是否大于p″_max,若否,转步骤3.7),若是,转步骤3.10);
35、3.12)、令id=id+1,判断id是否大于n,若否,令l=1,m=2,n=3,转步骤3.2),若是,转步骤3.13);
36、3.13)、保存所有的rid(t)、p′id(t),其中rid(t)包含第id号激光发射基站的基准脉冲信号脉宽中点时刻,p′id(t)包含第id号激光发射基站的扇面脉冲信号脉宽中点时刻以及同频干扰。
37、优选地,所述步骤4)具体为:
38、4.1)、初始化变量,令o=1,p=1,q=2,id=1,记rid_max为序列rid(t)中的扇面脉冲信号个数,设置两个扇面脉冲信号的扇面法向量的初始夹角θ,以及干扰滤除时所允许的角度最大误差偏移量θ_offset;
39、4.2)、判断to<tp<tq<to+1是否成立,其中to表示rid(t)中的第o个中点时刻,tp、tq分别表示p′id(t)中的第p、q个中点时刻,若是,转步骤4.3),若否,转步骤4.4);
40、4.3)、计算其中θ′为tp、tq分别代表的扇面脉冲信号的扇面之间的夹角,若满足|θ-θ′|≤θ_offset,认定tp、tq分别第id号激光发射基站的基准脉冲信号ro对应两个扇面脉冲信号po1、po2的中点时刻,并以pid(t)记录,转步骤4.5),若不满足,转步骤4.6);
41、4.4)、令p=p+1、q=p+1,转步骤4.2);
42、4.5)、令o=o+1,判断o是否大于rid_max,若否,转步骤4.4),若是,转步骤4.7);
43、4.6)、令q=q+1,若满足tq<to+1,转步骤4.3),若不满足,转步骤4.4);
44、4.7)、令id=id+1,判断id是否大于n,若否,令o=1,p=1,q=2,转步骤4.2),若是,转步骤4.8);
45、4.8)、保存所有的pid(t),其包含第id号激光发射基站的扇面脉冲信号脉宽中点时刻。
46、与现有技术相比,本发明的面向旋转激光定位系统的信号识别与干扰滤除方法具有如下有益技术效果中的一者或多者:
47、1、本发明能将混合激光信号自适应地识别为基准脉冲信号与扇面脉冲信号,从而无需提前录入基准与扇面的脉宽门限。
48、2、本发明能通过在分频过程中提取近似频率分量,实现对非同频干扰的滤除;通过在角度解算的过程中比对角度与理论值,实现对同频干扰的滤除。
49、3、本发明能通过对脉冲信号脉宽的对比自适应地识别信号,实现在不同距离下地高效测量,通过利用周期和角度对常见反光干扰进行滤除,实现在有干扰环境下的正确解算,从而提高了系统算法的容错,增加了环境实用性。
- 还没有人留言评论。精彩留言会获得点赞!