用于流水线的瓶子自动分类系统及方法与流程
本发明涉及视觉识别,特别涉及用于流水线的瓶子自动分类系统及方法。
背景技术:
1、对瓶子的抓取是工业化生产下基于瓶子包装以及回收利用的主要工作内容。传统的分拣过程中需要人力完成物品的抓取、搬运,生产效率低下、劳动强度高、工作环境恶劣,具有一定危险性。因此,工件的抓取是工业生产流水线上工业机器人的一项重要技术,而机械臂是大量自动化控制的机械装置,是现代工业生产活动中的重要设备,在工业化流水线工作的过程中使用机械臂对各种工件进行操作将在极大程度上减轻劳动负担,提高工作效率。
2、对于单一种类瓶子的流水线,机械臂只需要依次抓取瓶子放置即可,而对于多种类瓶子的流水线,要求机械臂在抓取到不同的瓶子后,放置到不同的指定地方,以实现瓶子的分类。
3、为此,需要一种能够准确、智能的进行瓶子分类的用于流水线的瓶子自动分类系统及方法。
技术实现思路
1、本发明的目的之一在于,提供用于流水线的瓶子自动分类系统,能够准确、智能的进行瓶子分类。
2、为了解决上述技术问题,本技术提供如下技术方案:
3、用于流水线的瓶子自动分类系统,包括用于传送瓶子的第一传送带、以及从传送带上抓取瓶子的机械臂,还包括:
4、图像采集模块,用于连续拍摄第一传送带上的图像;
5、识别模块,用于对图像进行预处理,提取特征;将提取后的特征输入预训练的神经网络模块,通过神经网络模型进行推理,输出瓶子对应类别的概率,根据预设的概率阈值,确定瓶子的类别;
6、机械臂控制模块,用于控制机械臂抓取对应类别的瓶子,放置于类别对应的目标位置。
7、基础方案原理及有益效果如下:
8、本方案通过引入图像采集模块、识别模块和机械臂控制模块,能够实现对流水线上瓶子高效的自动分类。通过采用预训练的神经网络模型,能够对提取后的特征进行推理,输出瓶子对应类别的概率,确保每个瓶子都能够被正确地归类到相应的类别,从而降低错误分类的风险。
9、通过提供预设的概率阈值,用于确定瓶子的类别。使用户可以根据具体应用的需求进行调整,从而适用不同的场景,确保在不同情况下取得最佳的分类效果。
10、综上,本方案能够实现高效、准确、灵活、智能的瓶子分类,从而提高流水线生产效率。
11、进一步,所述识别模块包括:
12、预处理单元,用于对图像进行预处理,预处理包括去噪、调整图像的亮度和对比度;
13、特征提取单元,用于从预处理过的图像中提取特征,特征包括形状、颜色、纹理中的一种或多种;
14、模型推理单元,用于使用卷积神经网络模型对提取的特征进行推理,输出瓶子对应类别的概率;
15、后处理单元,用于根据输出的瓶子对应类别的概率,以及预设的概率阈值,确定瓶子的类别。
16、通过预处理单元进行去噪,调整图像的亮度和对比度,助于提高图像质量,减少由于噪声或不一致的亮度对识别性能的影响。通过特征提取使系统更能全面地捕捉瓶子的特征信息,提高了对不同类型瓶子的区分能力,从而提升分类的准确性。
17、进一步,所述识别模块还包括坐标提取单元,用于根据提取的特征确定瓶子在图像中的坐标,坐标变换单元,用于根据预设的坐标转换关系,将图像中的坐标转换到机械臂坐标系中,得到新的坐标,还用于获取传送带的运行速度,根据新的坐标,传送带的运行速度和机械臂的抓取区域,计算瓶子的到达时间和抓取坐标。
18、机械臂控制模块,用于根据瓶子的到达时间和抓取坐标,控制机械臂抓取对应类别的瓶子。
19、通过引入坐标提取单元和坐标变换单元,系统能够准确获知瓶子的空间位置信息,从而使得机械臂的抓取更准确,能够提高整体效率。
20、进一步,所述后处理单元还用于获取光照数据和传送带的运行速度,根据光照数据和传送带的运行速度自适应调整概率阈值。
21、光照条件和传送带运行速度因工业生产环境的不同而变化。通过实时获取光照数据,系统能够根据光照强度的变化,调整概率阈值,从而稳定地适应不同亮度下的图像。通过实时获取传送带的运行速度并相应调整概率阈值,有助于提高在高速流水线上的分类准确性。从而提高系统在各种工作环境下的鲁棒性。
22、自适应调整概率阈值的机制减少了对人工参数调整的需求,减少了人为错误的可能性,提高了整个系统的自动化水平。
23、进一步,所述识别模块还包括密度统计单元,用于根据单位时间内通过的瓶子,计算传送带的瓶子密度;
24、还包括传送带控制模块,用于根据瓶子的密度设置新的运行速度,在倒计时预设时间后,调整传送带的运行速度至新的运行速度。
25、根据实时瓶子密度调整传送带的运行速度,系统能够更好地应对不同工作负荷下的需求。这有助于提高整个生产线的吞吐量,确保在高密度和低密度情况下都能够保持识别的高准确率。
26、本发明的目的之二在于,提供用于流水线的瓶子自动分类方法,包括如下内容:
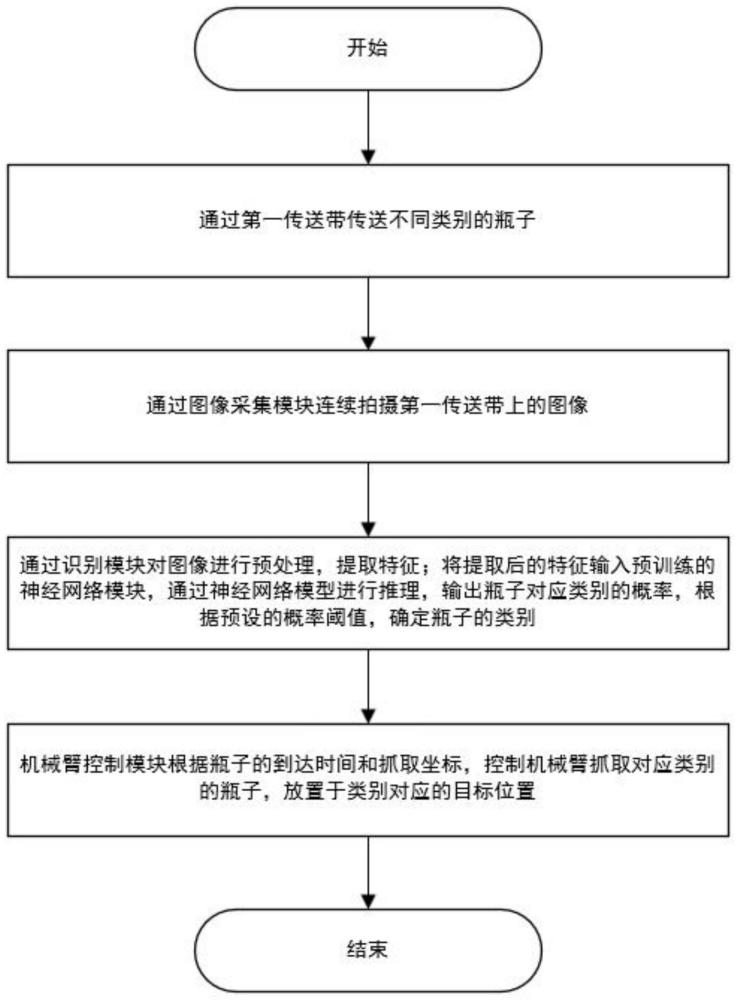
27、s1、通过第一传送带传送不同类别的瓶子;
28、s2、通过图像采集模块连续拍摄第一传送带上的图像;
29、s3、通过识别模块对图像进行预处理,提取特征;将提取后的特征输入预训练的神经网络模块,通过神经网络模型进行推理,输出瓶子对应类别的概率,根据预设的概率阈值,确定瓶子的类别;
30、s4、机械臂控制模块控制机械臂抓取对应类别的瓶子,放置于类别对应的目标位置。
31、本方案能够实现对流水线上瓶子高效的自动分类。通过采用预训练的神经网络模型,能够对提取后的特征进行推理,输出瓶子对应类别的概率,确保每个瓶子都能够被正确地归类到相应的类别,从而降低错误分类的风险。
32、通过提供预设的概率阈值,用于确定瓶子的类别。使用户可以根据具体应用的需求进行调整,从而适用不同的场景,确保在不同情况下取得最佳的分类效果。
33、综上,本方案能够实现高效、准确、灵活、智能的瓶子分类,从而提高流水线生产效率。
34、进一步,所述步骤s3具体包括:
35、s301、对图像进行预处理,预处理包括去噪、调整图像的亮度和对比度;
36、s302、从预处理过的图像中提取特征,特征包括形状、颜色、纹理中的一种或多种;
37、s303、使用卷积神经网络模型对提取的特征进行推理,输出瓶子对应类别的概率;
38、s304、根据输出的瓶子对应类别的概率,以及预设的概率阈值,确定瓶子的类别。
39、进一步,所述步骤s3还包括:
40、s305、根据提取的特征确定瓶子在图像中的坐标;
41、s306、根据预设的坐标转换关系,将图像中的坐标转换到机械臂坐标系中,得到新的坐标;
42、s307、获取传送带的运行速度,根据新的坐标,传送带的运行速度和机械臂的抓取区域,计算瓶子的到达时间和抓取坐标。
43、步骤s4中,机械臂控制模块根据瓶子的到达时间和抓取坐标,控制机械臂抓取对应类别的瓶子。
44、进一步,所述步骤s3还包括:s308、获取光照数据和传送带的运行速度,根据光照数据和传送带的运行速度自适应调整概率阈值。
- 还没有人留言评论。精彩留言会获得点赞!