一种光伏故障的检测和定位方法、系统及相关设备与流程
本发明适用于光伏故障检测和定位,尤其涉及一种光伏故障的检测和定位方法、系统及相关设备。
背景技术:
1、随着深度学习技术的不断发展,深度学习技术在目标检测、图像分割领域有着广泛应用。无人机智能巡检是将无人机和深度学习技术相结合的一门新兴行业,它利用无人机航拍进行数据采集的便利性和深度学习目标检测的高精度识别检测能力对光伏场中的光伏故障进行目标探测、识别和定位。
2、目前,国内现有的光伏故障定位方法大多局限于组串级别,通常是利用目标检测算法检测出光伏故障在图像中的像素位置和组串在图像中的像素位置,从而得到故障所在组串的位置,最后通过无人机遥测数据或航拍图像的gps信息定位出该组串在光伏场中的实际位置。通过这种方法计算出的故障光伏组件在光伏组串中的相对位置通常由于无人机拍摄角度、高度的差异等因素不是特别精确。
3、因此亟需一种新的光伏故障的检测和定位方法、系统及相关设备来解决上述问题。
技术实现思路
1、本发明提供一种光伏故障的检测和定位方法、系统及相关设备,旨在解决现有技术中光伏故障的检测和定位精确度不高的问题。
2、第一方面,本发明提出了一种光伏故障的检测和定位方法,所述检测和定位方法包括以下步骤:
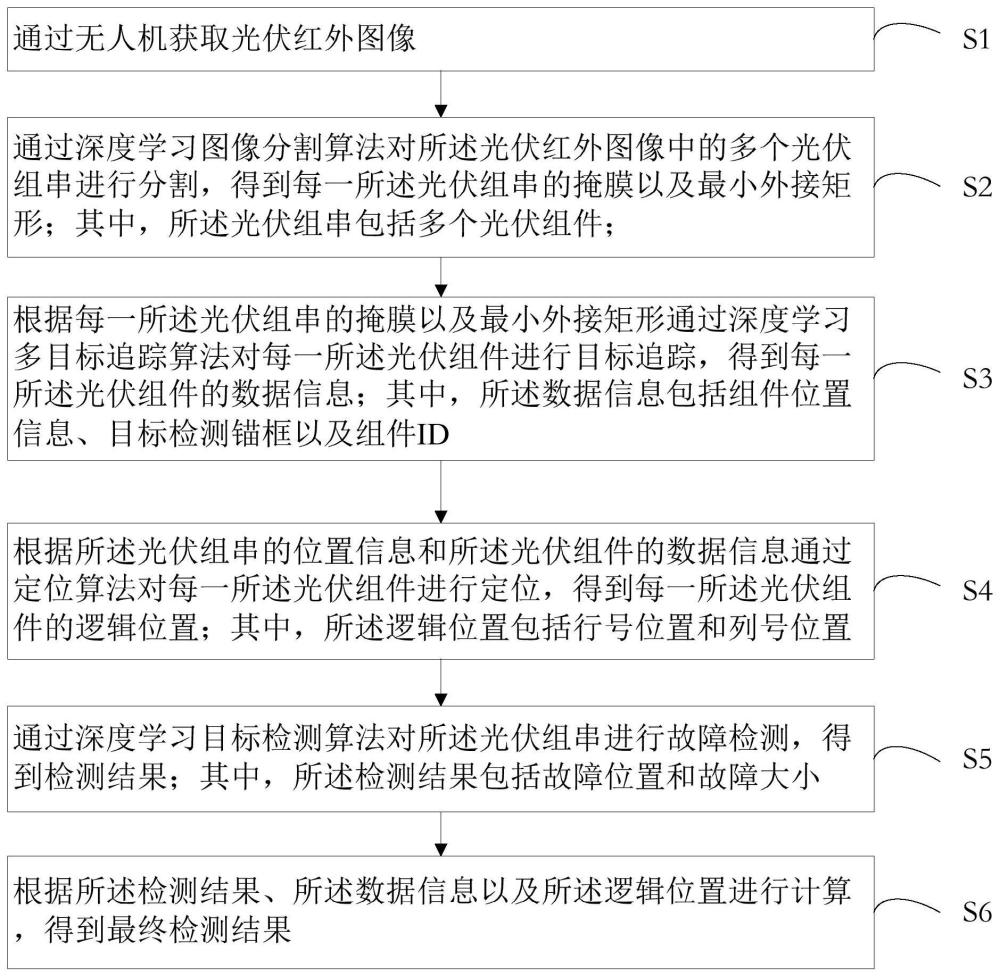
3、s1、通过无人机获取光伏红外图像;
4、s2、通过深度学习图像分割算法对所述光伏红外图像中的多个光伏组串进行分割,得到每一所述光伏组串的掩膜以及最小外接矩形;其中,所述光伏组串包括多个光伏组件;
5、s3、根据每一所述光伏组串的掩膜以及最小外接矩形通过深度学习多目标追踪算法对每一所述光伏组件进行目标追踪,得到每一所述光伏组件的数据信息;其中,所述数据信息包括组件位置信息、目标检测锚框以及组件id;
6、s4、根据所述光伏组串的位置信息和所述光伏组件的数据信息通过定位算法对每一所述光伏组件进行定位,得到每一所述光伏组件的逻辑位置;其中,所述逻辑位置包括行号位置和列号位置;
7、s5、通过深度学习目标检测算法对所述光伏组串进行故障检测,得到检测结果;其中,所述检测结果包括故障位置、故障大小以及故障类型;
8、s6、根据所述检测结果、所述数据信息以及所述逻辑位置进行计算,得到最终检测结果。
9、优选的,步骤s3中,还包括以下子步骤:
10、s31、根据所述光伏组串的位置信息进行计算,得到对应的所述光伏组串中的光伏组件的平均长和平均宽;
11、s32、根据所述平均长和所述平均宽对所述光伏组件的目标检测锚框的长宽进行矫正。
12、优选的,步骤s4中,还包括以下子步骤:
13、s41、判断当前定位的所述光伏组串是否已被定位,若否,则进行步骤s42;
14、s42、对所述光伏组件进行定位,定义当前定位的所述光伏组件的行号位置为x;构建行号滑动窗口,所述行号滑动窗口根据预设滑动窗口规则进行移动,计算所述行号滑动窗口的垂直位置在所述光伏组串中所占的比例,当比例大于第一预设阈值时,则当前定位的所述光伏组件的行号位置为x+1;
15、s43、定义当前定位的所述光伏组件的行号位置为y;构建列号滑动窗口,所述列号滑动窗口根据所述预设滑动窗口规则进行移动,计算所述列号滑动窗口的水平位置在所述光伏组串中所占的比例,当比例大于第二预设阈值时,则当前定位的所述光伏组件的列号位置为y+1;
16、s44、返回步骤s42,直至完成当前定位的所述光伏组串中所有光伏组件的定位;
17、s45、返回步骤s41,直至完成所有所述光伏组串的定位。
18、优选的,步骤s41中,判断当前定位的所述光伏组串是否已被定位,若是,则进行步骤s411;
19、s411、根据所述无人机的飞行方向,以所述光伏组件对应的目标检测锚框的大小对所述光伏组件进行排序,得到光伏组件序列;
20、s412、判断所述光伏组件序列中所述光伏组件的逻辑位置是否为空,若是,则进行步骤s413;
21、s413、提取所述逻辑位置为空的所述光伏组件作为空位置光伏组件,将所述空位置光伏组件的目标检测锚框沿x轴或y轴方向进行平移,得到平移窗口;
22、s414、在所述空位置光伏组件的序列排名之前的所述光伏组件中进行检索,检索出与所述空位置光伏组件距离最近的光伏组件,并定义为相邻光伏组件;
23、s415、判断所述相邻光伏组件的目标检测锚框与所述平移窗口的重叠度是否大于第三预设阈值;若是,则将所述相邻光伏组件的行号位置或列号位置加一作为所述空位置光伏组件的行号位置或列号位置;若否,则将所述平移窗口沿x轴和y轴移动多次,根据移动次数定义所述空位置光伏组件的逻辑位置;
24、s416、返回步骤s411,直至完成当前定位的所述光伏组串中所有光伏组件的定位。
25、优选的,所述预设滑动窗口规则为:
26、以当前定位的所述光伏组件的目标检测锚框的长作为所述行号滑动窗口的步长,并且所述行号滑动窗口沿y轴平移所述平均长的大小;
27、以当前定位的所述光伏组件的目标检测锚框的宽作为所述列号滑动窗口的步长,并且所述列号滑动窗口沿x轴平移所述平均宽的大小。
28、第二方面,本发明还提出了一种光伏故障的检测和定位系统,所述检测和定位系统包括:
29、获取模块,用于通过无人机获取光伏红外图像;
30、分割模块,用于通过深度学习图像分割算法对所述光伏红外图像中的多个光伏组串进行分割,得到每一所述光伏组串的掩膜以及最小外接矩形;其中,所述光伏组串包括多个光伏组件;
31、追踪模块,用于根据每一所述光伏组串的掩膜以及最小外接矩形通过深度学习多目标追踪算法对每一所述光伏组件进行目标追踪,得到每一所述光伏组件的数据信息;其中,所述数据信息包括组件位置信息、目标检测锚框以及组件id;
32、定位模块,用于根据所述光伏组串的位置信息和所述光伏组件的数据信息通过定位算法对每一所述光伏组件进行定位,得到每一所述光伏组件的逻辑位置;其中,所述逻辑位置包括行号位置和列号位置;
33、检测模块,用于通过深度学习目标检测算法对所述光伏组串进行故障检测,得到检测结果;其中,所述检测结果包括故障位置、故障大小以及故障类型;
34、计算模块,用于根据所述检测结果、所述数据信息以及所述逻辑位置进行计算,得到最终检测结果。
35、第三方面,本发明还提供一种计算机设备,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的光伏故障的检测和定位程序,所述处理器执行所述光伏故障的检测和定位程序时实现如上述实施例中任意一项所述的光伏故障的检测和定位方法中的步骤。
36、第四方面,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有光伏故障的检测和定位程序,所述光伏故障的检测和定位程序被处理器执行时实现如上述实施例中任意一项所述的光伏故障的检测和定位方法中的步骤。
37、与现有技术相比,本发明通过无人机获取光伏红外图像;通过深度学习图像分割算法对光伏红外图像中的多个光伏组串进行分割,得到光伏组串的位置信息;其中,光伏组串包括多个光伏组件;通过深度学习多目标追踪算法对每一光伏组件进行目标追踪,得到每一光伏组件的数据信息;其中,数据信息包括组件位置信息、目标检测锚框以及光伏组件对应的id;根据光伏组串的位置信息和光伏组件的数据信息通过定位算法对每一光伏组件进行定位,得到每一光伏组件的逻辑位置;其中,逻辑位置包括行号位置和列号位置;通过深度学习目标检测算法对光伏组串进行检测,得到检测结果;根据检测结果、数据信息以及逻辑位置进行计算,得到最终检测结果。本发明能够准确定位和检测到故障在光伏组串中光伏组件的位置,提高了对光伏故障的检测和定位的精确度。
- 还没有人留言评论。精彩留言会获得点赞!