一种集成特征提取和排序因果发现的轴承故障诊断方法
本发明涉及轴承故障诊断,具体是一种集成特征提取和排序因果发现的轴承故障诊断方法。
背景技术:
1、轴承是常见机械零部件,在机械设备中起着转动承载的作用。当轴承发生故障时,可能会引发整个机械设备的连锁反应,轻则导致机械设备停工,重则可能会出现严重的安全事故。因此,通过开发轴承故障诊断技术预先获知轴承可能存在的故障类型,对于确保机械设备可靠安全的运行至关重要。
2、现阶段,基于深度学习的轴承故障智能故障诊断方法已成为众多诊断技术中的热门选择。尽管上述轴承故障诊断方法已经取得了一定的成功,但仍存在一些问题。在特征提取方面,轴承故障信号通常是多维、非线性和非平稳的。例如在故障发生时,振动信号可能表现出突变、波形畸变等特征。常规的特征提取方法在处理这种非线性和非平稳信号时存在局限性,无法捕捉到故障信号中的动态变化,这种特征提取不完全的情况会导致部分重要信息的丢失,从而降低了故障诊断的准确性和可靠性。另外,尽管上述故障诊断方法降低了对建立模型的要求,但是这样建立的模型在解释性和泛化能力方面存在限制,导致难以建立起信号特征和轴承故障原因之间的因果关系,进而进一步影响诊断结果的准确性和可靠性,因此亟待解决。
技术实现思路
1、为了避免和克服现有技术中存在的技术问题,本发明提供了一种集成特征提取和排序因果发现的轴承故障诊断方法。本发明能够有效的提高轴承故障诊断的准确性。
2、为实现上述目的,本发明提供如下技术方案:
3、一种集成特征提取和排序因果发现的轴承故障诊断方法,包括以下诊断步骤:
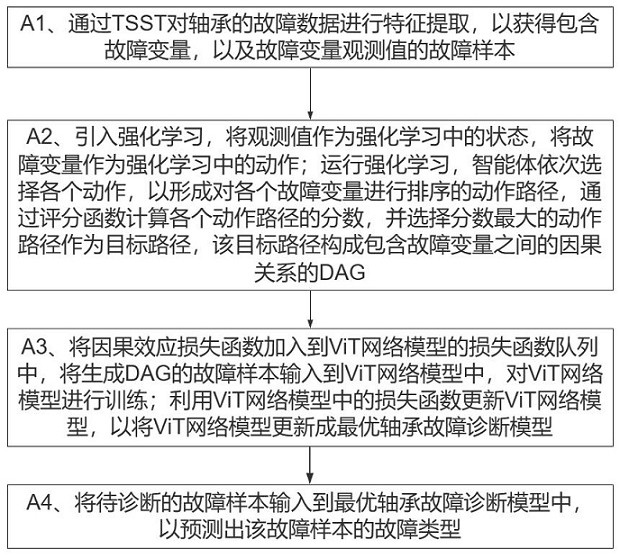
4、a1、通过tsst对轴承的故障数据进行特征提取,以获得包含故障变量,以及故障变量观测值的故障样本;
5、a2、引入强化学习,将观测值作为强化学习中的状态,将故障变量作为强化学习中的动作;运行强化学习,智能体依次选择各个动作,以形成对各个故障变量进行排序的动作路径,通过评分函数计算各个动作路径的分数,并选择分数最大的动作路径作为目标路径,该目标路径构成包含故障变量之间的因果关系的dag;
6、a3、将因果效应损失函数加入到vit网络模型的损失函数队列中,将生成dag的故障样本输入到vit网络模型中,对vit网络模型进行训练;利用vit网络模型中的损失函数更新vit网络模型,以将vit网络模型更新成最优轴承故障诊断模型;
7、a4、将待诊断的故障样本输入到最优轴承故障诊断模型中,以预测出该故障样本的故障类型。
8、作为本发明进一步的方案:评分函数具体如下:
9、;
10、其中, r表示评分函数, r的计算值即为分数;表示第 j个故障变量 x j的第 k个观测值; pa表示故障变量 x j在动作路径中的父节点,即与故障变量 x j相邻的前一个故障变量;表示与故障变量 x j似然相关的参数;表示参数的位数或长度;为条件概率,表示在给定故障变量 x j的父节点 pa的情况下,故障变量 x j取第 k个观测值的概率; m表示单个故障变量的观测值总数,也表示故障样本的总数; d表示故障变量的总数。
11、作为本发明再进一步的方案:步骤a2的具体步骤如下:
12、a21、每个故障样本均包含有 d个故障变量,每个故障变量均含有 m个观测值,即构成 m个故障样本;
13、将各个故障变量的观测值均输入到强化学习中,并由 d× m个观测值构成强化学习的状态空间 s, s={ s1, s2,…, s j,…, s d},其中, s1表示状态空间中的第1个状态,即由第1个故障变量的 m个观测值构成的数据集合; s2表示状态空间中的第2个状态,即由第2个故障变量的 m个观测值构成的数据集合; s j表示状态空间中的第 j个状态,即由第 j个故障变量的 m个观测值构成的数据集合; s d表示状态空间中的第 d个状态,即由第 d个故障变量的 m个观测值构成的数据集合;
14、a22、将故障变量作为强化学习的动作,并由 d个故障变量构成强化学习的动作空间 v, v={ v1, v2,…, v j,…, v d}, v1表示动作空间中的第1个动作,即第1个故障变量; v2表示动作空间中的第2个动作,即第2个故障变量; v j表示动作空间中的第 j个动作,即第 j个故障变量; v d表示动作空间中的第 d个动作,即第 d个故障变量;
15、a23、随机选择一个动作,开始运行强化学习,并根据当前动作进行状态转移操作,使智能体遍历动作空间中的所有动作,并通过最大化累计奖励期望策略确定智能体的动作路径;在动作路径中,当前动作的前一动作即为当前动作的父节点;
16、a24、重复执行步骤a23设定次数,获得对应数量的动作路径;通过评分函数计算各个动作路径的分数,并选择其中分数最高的动作路径作为目标路径;各个故障变量在该目标路径中的排序方式构成了包含故障变量之间因果关系的dag。
17、作为本发明再进一步的方案:步骤a3的具体步骤如下:
18、a31、基于dag中各个故障变量之间的因果关系,构建因果效应损失函数,因果效应损失函数具体表示如下:
19、;
20、其中, l cau表示因果效应损失函数; m表示输入到vit网络模型中的故障样本的数量,即全部的故障样本全部输入到vit网络模型中; x i表示第 i个故障样本; λ i表示故障样本 x i在因果效应损失函数中的权重参数; β i表示第 i个故障样本的因果效应值;
21、a32、将因果效应损失函数加入到vit网络模型的损失函数队列中,以构成vit网络模型的总损失函数,总损失函数 l total= l ce+ l reg+ l cau;其中 l ce具体表示如下:
22、;
23、其中, l ce表示交叉熵损失函数; m表示轴承的故障类型总数; y i, r表示第 i个故障样本通过vit网络模型预测出的故障类型是否与该故障样本的真实故障类型相同,是则取值为1,反之为0; p i, r表示vit网络模型预测出的第 i个故障样本是第 r个故障类型的概率, r∈[1,m];
24、 l reg具体表示如下:
25、;
26、其中, l reg表示正则化损失函数; m表示权重矩阵 w的行数; d表示权重矩阵 w的列数; w u,v表示权重矩阵 w的第 u行第 v列元素的值; u∈[1, m], v∈[1,d]; λ reg表示正则化系数;
27、a33、将生成dag的 m个故障样本全部输入到vit网络模型中,对vit网络模型进行迭代训练;当总损失函数值达到设定阈值时,停止迭代训练,并将此时的vit网络模型称为最优轴承故障诊断模型。
28、作为本发明再进一步的方案:因果效应损失函数中的因果效应可以通过因果推断中的前门调整方法或者是因果推断中的后门调整方法计算获得。
29、作为本发明再进一步的方案:在使用tsst处理轴承的故障数据时,将轴承离散型的振动信号由时域转换到时频域。
30、与现有技术相比,本发明的有益效果是:
31、1、本发明采用了tsst进行故障特征提取,解决了故障特征提取不完全的问题。同时,引入因果发现理论,研究了故障数据之间的因果关系,并通过vit网络模型修正因果关系,能够更准确地进行轴承故障诊断,并提高故障诊断的可靠性。
32、2、本发明提出的轴承故障诊断方法,通过因果发现和因果修正技术来减少数据不一致对诊断结果的影响。
33、3、本发明通过因果发现构建了故障变量和其对应的观测值之间的因果模型,以深入理解和分析轴承故障的因果关系,为后续的故障分类提供基础,并为实际应用中的故障诊断提供了可靠的支持。
34、4、本发明在构建的因果模型的基础上,借助vit网络模型和因果修正技术,实现了轴承的故障分类任务,提高了故障诊断的准确性和鲁棒性。
- 还没有人留言评论。精彩留言会获得点赞!