多台两向穿梭车同区域作业的仓储物流优化方法与流程
本发明涉及物流服务相关,更具体地说,本发明涉及多台两向穿梭车同区域作业的仓储物流优化方法。
背景技术:
1、随着仓储物流自动化技术的不断进步,物流行业对仓库出入库效率的要求越来越高,通过智能任务分配和双向穿梭车的路径规划,提高作业效率和质量。
2、现有技术(公开号为cn113741324a的发明专利申请)公开了一种plc控制系统下四向穿梭车同层多车调度方法,建立同层纵横相交并供四向穿梭车纵向横向运行的轨道网,通过每台四向穿梭车与控制模块之间的通讯的心跳检测,用于实现避免多台四向穿梭车在同层运行时发生碰撞。现有技术仅对仓储物流中穿梭车的碰撞路径进行干预,没有实现工作任务和穿梭车的碰撞路径的综合优化。因此,亟须多台两向穿梭车同区域作业的仓储物流优化方法。
技术实现思路
1、本发明针对现有技术中存在的技术问题,提供多台两向穿梭车同区域作业的仓储物流优化方法,以解决上述背景技术中提出的问题。
2、本发明解决上述技术问题的技术方案如下:多台两向穿梭车同区域作业的仓储物流优化方法,包括以下步骤:
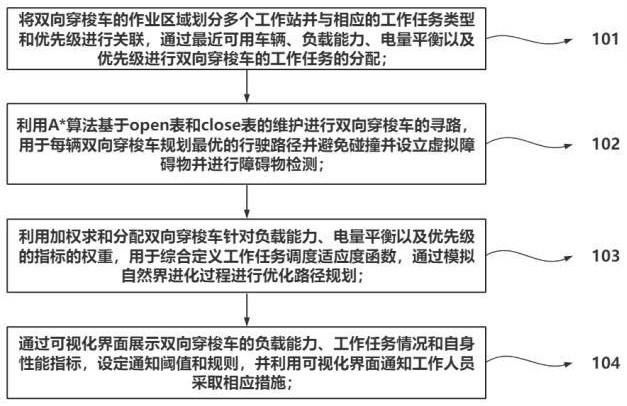
3、s101:将双向穿梭车的作业区域划分多个工作站并与相应的工作任务类型和优先级进行关联,通过最近可用车辆、负载能力、电量平衡以及优先级进行双向穿梭车的工作任务的分配;
4、s102:利用a*算法基于open表和close表的维护进行双向穿梭车的寻路,用于每辆双向穿梭车规划最优的行驶路径并避免碰撞并设立虚拟障碍物并进行障碍物检测;
5、s103:利用加权求和分配双向穿梭车针对负载能力、电量平衡以及优先级的指标的权重,用于综合定义工作任务调度适应度函数,通过模拟自然界进化过程进行优化路径规划;
6、s104:通过可视化界面展示双向穿梭车的负载能力、工作任务情况和自身性能指标,设定通知阈值和规则,并利用可视化界面通知工作人员采取相应措施;
7、在一个优选地实施方式中,所述s101中,将双向穿梭车的作业区域划分多个工作站,将双向穿梭车的工作任务分为入库、出库以及盘点类型并分配到不同工作站,其中入库类型工作任务设定为高优先级任务,出库类型工作任务设定为中优先级任务,盘点类型工作任务设定为低优先级任务,为每个工作站不同位置分配一个唯一标识符并用工作任务类型名称表示作为任务点,将每个工作站与相应的工作任务类型和优先级进行关联,利用摄像头获取每台双向穿梭车所在的当前工作站的位置,利用无线传输接口获取双向穿梭车负载情况和电量信息,通过最近可用车辆、负载能力、电量平衡以及优先级进行双向穿梭车的工作任务的分配。
8、进一步地,所述最近可用车辆分配利用摄像头结合负载能力实时监测车辆的空闲状态用于识别可用车辆,根据任务点的位置和双向穿梭车所在的当前工作站的位置,选择距离任务点最近且空闲的车辆进行任务分配。
9、进一步地,所述负载能力分配通过双向穿梭车的负载情况和双向穿梭车的自身负载要求进行监控,将重负载的任务分配给具备负载能力的车辆。
10、进一步地,所述电量平衡分配通过双向穿梭车完成任务的耗电情况结合当前双向穿梭车的电量情况将任务分配给电量充足的双向穿梭车。
11、进一步地,所述优先级分配根据工作任务类型的优先级,将高优先级任务分配给空闲且负载能力小的双向穿梭车,将中优先级任务分配给空闲且负载能力大以及繁忙且负载能力小的双向穿梭车,将低优先级任务排序在高、中优先级任务完成后进行分配。
12、在一个优选地实施方式中,所述s102中,利用a*算法基于open表和close表的维护进行双向穿梭车的寻路,用于每辆双向穿梭车规划最优的行驶路径并避免碰撞,其中open表存储待扩展的节点集合,close表存储已扩展的节点集合,其每个节点都有一个估价函数,其具体公式为:
13、;其中表示从起始节点到目标节点经过当前节点x的代价估计,表示从起始节点到当前节点的实际代价,表示当前节点到目标节点的估计代价,当的值越小,表示节点x越优,即距离起始节点越近且距离目标节点越近。
14、进一步地,所述a*算法具体步骤为:初始化open表和close表,将起始节点加入open表,并设置其值为0,从open表中选择值最小的节点作为当前节点,将其加入close表,如果当前节点是目标节点,则路径规划完成,对当前节点的所有邻居节点进行遍历,并计算每个邻居节点的值,如果邻居节点不在open表或close表中,则将其加入open表,并更新其父节点为当前节点,如果邻居节点已经在open表中,比较原来的值和新计算的值,当新的值更小,则更新其父节点为当前节点,并更新值,如果邻居节点已经在close表中,不进行任何操作,重复选择遍历操作直至找到目标节点或open表为空,当找到目标节点,通过回溯父节点获取从起始节点到目标节点的最短路径。
15、进一步地,利用摄像头获取每台双向穿梭车所在的当前工作站的位置,设立虚拟障碍物并进行障碍物检测,当检测到可能的碰撞风险时,及时采取措施避免碰撞。
16、在一个优选地实施方式中,所述s103中,利用加权求和分配双向穿梭车针对负载能力、电量平衡以及优先级的指标的权重,用于综合定义工作任务调度适应度函数,其具体公式为:
17、;其中表示综合定义工作任务调度适应度函数,分别表示针对负载能力、电量平衡以及优先级的指标的权重,分别表示负载能力、电量平衡以及优先级的指标。
18、进一步地,通过优先级分配初始化工作任务调度方案作为初始种群,其中每个个体代表一个可能的工作任务调度方案。
19、进一步地,根据综合定义工作任务调度适应度函数选择优秀的个体作为父代个体,用于产生下一代个体。
20、进一步地,通过交叉操作,将父代个体的基因进行交换和组合,产生新的个体作为下一代种群。
21、进一步地,对新生成的个体进行变异操作并引入新的基因变化,重复进行选择、交叉和变异操作,直到满足达到最大迭代次数。
22、在一个优选地实施方式中,所述s104中,通过可视化界面展示双向穿梭车的负载能力、工作任务情况和自身性能指标,利用仪表盘显示当前双向穿梭车的运行速度,设定双向穿梭车的运行速度为5m/s,当双向穿梭车的运行速度超过设定,利用可视化界面红灯标记提醒工作人员可能出现多台双向穿梭车因速度碰撞情况,通过图表显示当前工作任务进度以及双向穿梭车的电量平衡,设定双向穿梭车的电量平衡低于5%为低电量运行状态,当双向穿梭车的电量平衡处于低电量运行状态,利用可视化界面连接摄像头获取双向穿梭车所在的当前工作站的位置并进行位置标记,通知工作人员及时补充双向穿梭车电量。
23、本发明的有益效果是:通过将作业区域划分为多个工作站,并根据任务类型和优先级进行关联,能够更精细地进行任务调度和分配,智能地选择合适的工作站和双向穿梭车执行工作任务,提高任务完成效率,根据双向穿梭车的当前负载情况和电量状况,选择合适的任务分配给空闲且电量充足的双向穿梭车,避免双向穿梭车存在过载以及电量不足的情况,提高整体作业效率和可靠性,根据任务的优先级,调度双向穿梭车的工作任务,确保高优先级任务得到及时处理,提高任务执行的灵活性和响应性,利用a*算法基于open表和close表的维护进行双向穿梭车的寻路能够为每辆双向穿梭车规划最优的行驶路径,并综合定义工作任务调度适应度函数,通过模拟自然界进化过程进行优化路径规划,通过可视化界面工作人员能够清晰地看到双向穿梭车的负载情况、当前正在执行的任务以及关键性能指标,从而能够及时发现问题和异常情况。
- 还没有人留言评论。精彩留言会获得点赞!