基于可视化平台的矿区监控方法、装置和矿区监控系统与流程
本发明涉及安全监控,具体而言,涉及一种基于可视化平台的矿区监控方法、装置、计算机可读存储介质和矿区监控系统。
背景技术:
1、目前煤矿企业安全生产管理中的视频高清度不够,部分设备仍是标清或模拟设备;对于生产过程的工业电视,未实现视频全覆盖;现有视频的智能化技术不高,仅能实现事后的追溯,ai事前智能分析预警的应用很少;
2、在安全管理中,对作业安全隐患、装置安全隐患无法完全规避,人为排查力度大,需靠技术手段,实现规避、降低和监测风险的目的;传统的视频监控以2d的形式呈现在视频墙上,直观性以及全局感较差,危化品状态监测也以数字展示及阈值报警为主,一方面增加了集控调度及管理人员监盘的难度和压力,另外当出现危化品泄漏时,不能快速的对事故现场进行定位以及快速的查看现场情况,基于报警等制定应急策略。
技术实现思路
1、本技术的主要目的在于提供一种基于可视化平台的矿区监控方法、装置、计算机可读存储介质和矿区监控系统,以至少解决现有技术中的监控系统以2d形式呈现,以数字展示和阈值为主,增加工作人员调度难度的问题。
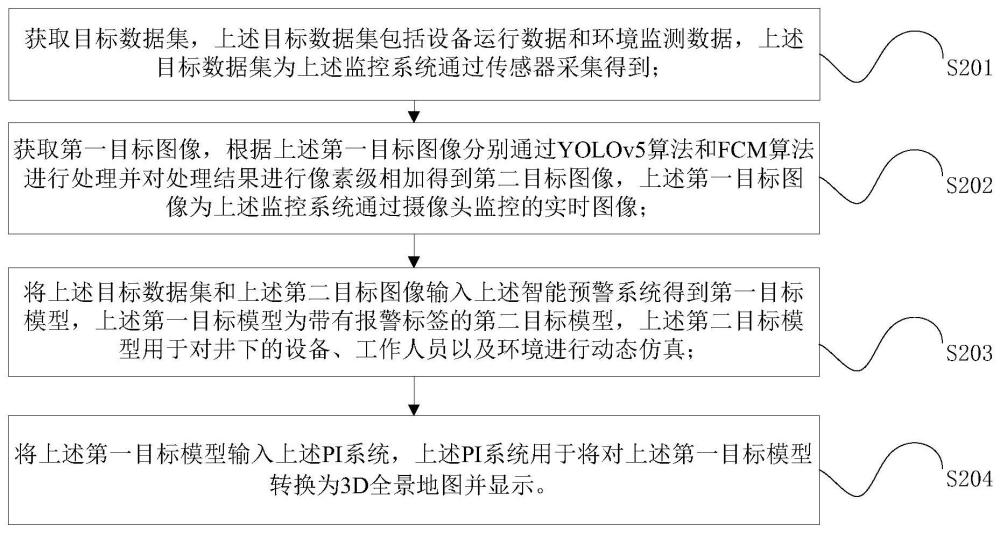
2、为了实现上述目的,根据本技术的一个方面,提供了一种基于可视化平台的矿区监控方法,所述可视化平台包括智能预警系统、pi系统和监控系统,所述矿区监控方法包括:获取目标数据集,所述目标数据集包括设备运行数据和环境监测数据,所述目标数据集为所述监控系统通过传感器采集得到;获取第一目标图像,根据所述第一目标图像分别通过yolov5算法和fcm算法进行处理并对处理结果进行像素级相加得到第二目标图像,所述第一目标图像为所述监控系统通过摄像头监控的实时图像;将所述目标数据集和所述第二目标图像输入所述智能预警系统得到第一目标模型,所述第一目标模型为带有报警标签的第二目标模型,所述第二目标模型用于对井下的设备、工作人员以及环境进行动态仿真;将所述第一目标模型输入所述pi系统,所述pi系统用于将对所述第一目标模型转换为3d全景地图并显示。
3、可选地,在获取目标数据集之前,所述方法还包括:将第一映射关系输入所述监控系统,所述第一映射关系为所述目标数据集中的数据的数据类型与对应的数据标准的映射关系;将第二映射关系输入所述监控系统,所述第二映射关系为所述目标数据集中的数据的数据类型与对应的数据模型的映射关系;将第三映射关系输入所述监控系统,所述第三映射关系为所述目标数据集中的数据对应的所述数据模型与第一目标位置的映射关系,所述第一目标位置为所述数据模型在目标数据模型中的位置,所述目标数据模型包括所述目标数据集中的所有数据。
4、可选地,根据所述第一目标图像分别通过yolov5算法和fcm算法进行处理,其中,根据所述第一目标图像通过yolov5算法进行处理,包括:根据第一预设尺寸对所述第一目标图像进行裁剪得到第三目标图像,并根据所述第三目标图像中像素块的像素值进行归一化得到第四目标图像;遍历预设特征类型对所述第四目标图像依次进行特征匹配,确定多个目标像素块,所述目标像素块为对应特征类型与所述预设特征一致的所述像素块;根据所述目标像素块进行检测得到第二目标位置和目标类别,所述第二目标位置所述目标像素块的边框的坐标,所述目标类别为所述目标像素块对应的目标对象的类别,所述目标对象至少包括井下工作人员以及井下设备;根据所述第二目标位置和目标类别对所述第四目标图像添加标识信息得到第五目标图像。
5、可选地,根据所述第一目标图像分别通过yolov5算法和fcm算法进行处理,其中,根据所述第一目标图像通过fcm算法进行处理,包括:根据所述第二目标位置确定初始聚类中心,所述初始聚类中心与所述第二目标位置一一对应;根据所述初始聚类中心确定所述第二目标位置中各所述目标像素块对所述初始聚类中心的隶属度得到目标隶属度;根据所述目标隶属度构建隶属度矩阵,并根据所述初始聚类中心和所述隶属度矩阵进行迭代直至迭代次数达到第一预设值或相邻两次迭代对应的所述初始聚类中心的欧氏距离小于第二预设值得到目标聚类簇;根据所述目标聚类簇对所述第五目标图像中所述第二目标位置进行调整得到第六目标图像。
6、可选地,对处理结果进行像素级相加得到第二目标图像,包括:根据所述第五目标图像确定各所述像素块对应的像素值得到第一像素值;根据所述第六目标图像确定各所述像素块对应的像素值得到第二像素值;计算所述第一像素值和对应的所述第二像素值的和得到所述第二目标图像。
7、可选地,将所述目标数据集和所述第二目标图像输入所述智能预警系统,包括:获取预设数据集,所述预设数据集中的参数与所述目标数据集中的参数一一对应,所述预设数据集中包括各所述参数对应的预设范围;根据所述第二目标图像构建所述第二目标模型;对所述第二目标模型添加定点标签并在所述定点标签中写入所述目标数据集中的参数以及所述预设数据集中对应的所述预设范围得到第三目标模型,所述定点标签用于表征所述目标对象为所述井下设备;对所述第三目标模型添加矢量标签得到第四目标模型,所述矢量标签用于表征对应区域中所述目标对象的行进方向;对所述第四目标模型添加区域标签得到第五目标模型,所述区域标签用于表征对应区域中存在的所述目标对象的类型;在所述定点标签中所述目标数据集中的参数不在对应的所述预设范围的情况下,对所述定点标签添加所述报警标签;在所述矢量标签对应的区域中所述目标对象的行进方向与所述矢量标签不一致的情况下,对所述矢量标签添加所述报警标签;在所述区域标签对应的区域中不存在对应的所述目标对象或所述目标对象的数量大于第三预设值的情况下,对所述区域标签添加所述报警标签。
8、可选地,将所述第一目标模型输入所述pi系统,包括:对所述第一目标模型进行分区得到多个子区域,在所述子区域中存在所述报警标签的情况下,将所述子区域变换为预设颜色。
9、根据本技术的另一方面,提供了一种基于可视化平台的矿区监控装置,所述可视化平台包括智能预警系统、pi系统和监控系统,所述装置包括:第一获取单元,用于获取目标数据集,所述目标数据集包括设备运行数据和环境监测数据,所述目标数据集为所述监控系统通过传感器采集得到;第二获取单元,用于获取第一目标图像,根据所述第一目标图像分别通过yolov5算法和fcm算法进行处理并对处理结果进行像素级相加得到第二目标图像,所述第一目标图像为所述监控系统通过摄像头监控的实时图像;第一输入单元,用于将所述目标数据集和所述第二目标图像输入所述智能预警系统得到第一目标模型,所述第一目标模型为带有报警标签的第二目标模型,所述第二目标模型用于对井下的设备、工作人员以及环境进行动态仿真;第二输入单元,用于将所述第一目标模型输入所述pi系统,所述pi系统用于将对所述第一目标模型转换为3d全景地图并显示。
10、根据本技术的再一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的程序,其中,在所述程序运行时控制所述计算机可读存储介质所在设备执行任意一种所述的方法。
11、根据本技术的又一方面,提供了一种矿区监控系统,包括:一个或多个处理器,存储器,以及一个或多个程序,其中,所述一个或多个程序被存储在所述存储器中,并且被配置为由所述一个或多个处理器执行,所述一个或多个程序包括用于执行任意一种所述的方法。
12、应用本技术的技术方案,在上述基于可视化平台的矿区监控方法中,首先,获取目标数据集,上述目标数据集包括设备运行数据和环境监测数据,上述目标数据集为上述监控系统通过传感器采集得到;然后,获取第一目标图像,根据上述第一目标图像分别通过yolov5算法和fcm算法进行处理并对处理结果进行像素级相加得到第二目标图像,上述第一目标图像为上述监控系统通过摄像头监控的实时图像;之后,将上述目标数据集和上述第二目标图像输入上述智能预警系统得到第一目标模型,上述第一目标模型为带有报警标签的第二目标模型,上述第二目标模型用于对井下的设备、工作人员以及环境进行动态仿真;最后,将上述第一目标模型输入上述pi系统,上述pi系统用于将对上述第一目标模型转换为3d全景地图并显示。本技术设置通过监测参数与实时图像进行融合,通过监测井下的全局图像信息监控井下的设备以及人员的状态,同时监测设备以及环境数据,结合监测数据将图像变换为全景地图,便于工作人员对井下进行直观的监控,该方法解决了现有技术中的监控系统以2d形式呈现,以数字展示和阈值为主,增加工作人员调度难度的问题。
- 还没有人留言评论。精彩留言会获得点赞!