一种确定指尖密封结构径向临界工作能力的方法与流程
本发明涉及机械动密封,具体涉及一种确定指尖密封结构径向临界工作能力的方法。
背景技术:
1、指尖密封是一种新型柔性动密封技术,可承担航空发动机叶片叶尖、压气机和涡轮级间以及轴承腔等部位的密封任务。指尖密封结构综合了篦齿密封具有的结构简单和刷密封具有的柔顺性的优点,使其在航空发动机密封系统中具有潜在的应用价值。并且,指尖密封结构具有的柔性使其能够适应转子的径向跳动和离心膨胀但不破坏其完整性,避免了传统篦齿密封的刚性磨损问题,因而具有更长的寿命。
2、指尖密封结构与转子跑道往往以微小的间隙或过盈配合状态装配,但其通常在航空发动机内高温、高压差和高转速的条件下工作,转子跑道在偏心、跳动、离心膨胀和热膨胀等因素的作用下将产生径向位移,从而导致密封与转子跑道的过盈量显著增大。随着技术成熟度的提升,指尖密封逐步发展至工程应用阶段,此时密封设计人员发现尽管指尖密封结构所具有的柔性能够适应转子跑道的径向位移,但是该适应能力是有临界值的,即指尖密封结构存在一个允许的临界径向变形量,称之为径向临界工作能力。当转子跑道在工作中产生的径向位移大于密封的临界工作能力时,密封刚度会急剧增大并可能产生结构性破坏,进而导致泄漏增大、轴耗功增加、密封件烧熔等问题,且这种情况对大尺寸密封而言尤为严重。
3、对于指尖密封结构径向临界工作能力的定义,更具体而言,如图9、图10所示:指尖密封结构通常由前挡板、隔片、若干层指尖密封片和后挡板通过销钉铆接而成,其中指尖密封片由沿周向均匀排布的多个指单元构成,指单元包含柔性圆弧型指梁及指梁之间的间隙,指梁的自由端又称为指尖靴。当转子跑道发生径向位移时,指尖密封的指梁根部间隙不会发生变化而指尖靴前端处间隙变化最大,指尖靴前端会翘起并与转子跑道形成一定的间隙,只有指尖靴根部会始终与转子跑道接触。此外,指尖密封发生径向变形后,最先与上游指梁接触的位置为指尖靴上端部前缘,且从指尖靴上端部前缘到指梁根圆位置指梁之间间隙越来越大。当指尖靴上端部前缘与相邻指梁之间的间隙为零且接触压强亦为零,这表明与其相邻指梁刚刚发生刚性接触;当转子径向位移继续增大后,此时指梁之间大范围接触间隙为零,且接触压强最大可达数十兆帕,这表明指梁之间产生了较大的相互作用力,在此接触力作用下指梁有可能产生塑性变形甚至发生轴向变形,从而破坏指尖密封的完整性、影响指尖密封的密封性能与寿命,即指尖密封存在径向临界工作能力。
4、目前,在产品设计阶段获取指尖密封结构径向临界工作能力的通用方法耗时耗力,建模与迭代计算中所消耗的时间成本和人力成本是巨大的,因此,建立指尖密封结构径向临界工作能力的快速评估方法对指导指尖密封结构设计有着重要意义。
技术实现思路
1、有鉴于此,本发明提供了一种确定指尖密封结构径向临界工作能力的方法,以解决目前对于指尖密封结构径向临界工作能力的通用方法耗时耗力的问题。
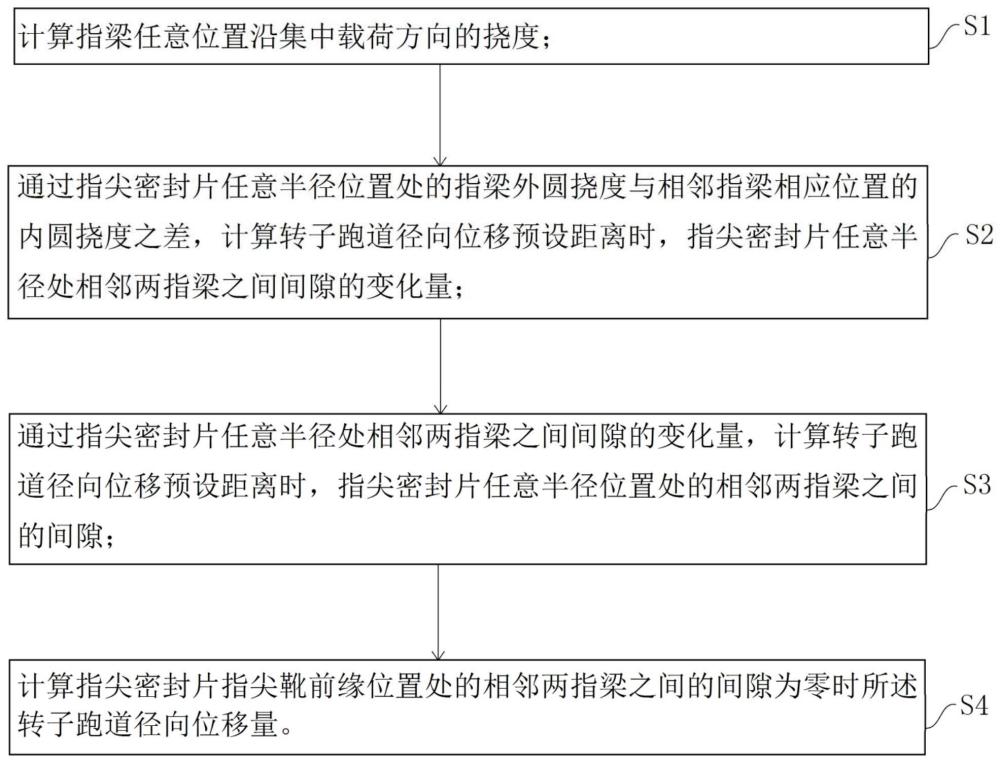
2、本发明提供了一种确定指尖密封结构径向临界工作能力的方法,包括以下步骤:
3、计算指梁任意位置沿集中载荷方向的挠度;
4、通过指尖密封片任意半径位置处的指梁外圆挠度与相邻指梁相应位置的内圆挠度之差,计算转子跑道径向位移预设距离时,指尖密封片任意半径处相邻两指梁之间间隙的变化量;
5、通过指尖密封片任意半径处相邻两指梁之间间隙的变化量,计算转子跑道径向位移预设距离时,指尖密封片任意半径位置处的相邻两指梁之间的间隙;
6、计算指尖密封片指尖靴前缘位置处的相邻两指梁之间的间隙为零时所述转子跑道径向位移量。
7、在一种可选的实施方式中,在“计算指梁任意位置沿集中载荷方向的挠度”的步骤中,还包括:计算所述转子跑道径向位移的预设距离为δ,将所述指梁简化为悬臂梁结构,并利用悬臂梁端部受集中载荷时的挠度计算公式可计算指梁任意位置x沿集中载荷方向的挠度δx:
8、
9、(1)式中:e为密封材料弹性模量;iz为指梁截面对弯曲中性轴的惯性矩;fψ为密封与转子表面接触力fn在垂直于指梁型线切方向的分量;lx为任意位置x处距悬臂梁固定端的长度。
10、在一种可选的实施方式中,在“通过指尖密封片任意半径位置处的指梁外圆挠度与相邻指梁相应位置的内圆挠度之差,计算转子跑道径向位移为δ时,指尖密封片任意半径处相邻两指梁之间间隙的变化量”的步骤中,还包括:当所述转子跑道产生径向位移量δ,所述指尖密封结构发生径向变形且所述指梁之间的间隙is会随之变化,通过计算所述指尖靴下端部受集中载荷时指梁各点的变形量,获取由所述转子跑道径向位移引起的所述指梁之间间隙的变化规律;在所述转子跑道径向位移量δ的作用下,指尖密封片任意半径位置处的相邻两指梁之间间隙的变化量为δis,根据几何关系可知δis的值等于该半径r处指梁外圆挠度δo与相邻指梁相应位置r′处内圆挠度δi之差,即:
11、δis=δo-δi (2)
12、将(1)式代入(2)式可得:
13、
14、(3)式中:lo为由指梁根部到任意半径r处的指梁外圆弧长,li为由指梁根部到半径r′处的指梁内圆弧长,lst为指梁弧长。
15、在一种可选的实施方式中,在“通过指尖密封片任意半径处相邻两指梁之间间隙的变化量,计算转子跑道径向位移为δ时,指尖密封片任意半径位置处的相邻两指梁之间的间隙”的步骤中,还包括:分析指尖靴前端位置的挠度和受力情况以及几何关系可得:
16、fψ=fncosψ=keδcosψ(4)
17、
18、lst=rs(βb-βf)(6)
19、lo=rs(βb-βr)(7)
20、li=rs(βb-βr′)(8)
21、上述(4)式至(8)式中:ke为单个指单元的径向刚度;ψ为fψ与fn的夹角,且βb、βf、βr和βr′均为中间几何变量,dcc为指梁圆弧基圆直径;
22、通过分析几何关系可知:βb为三角形oae所夹角oae、βf为三角形oab所夹角oab、βr为三角形oac所夹角oac和βr′为三角形oad所夹角oad,由此根据三角函数余弦定理可得:
23、
24、
25、
26、
27、(12)式中df为指尖靴上端部直径,db为指梁根圆直径,rs为指梁圆弧半径,r′可通过分析三角形oaf和三角形oag的几何关系得到:
28、
29、将(4)式至(8)式代入(2)式并与自由状态下所述指梁之间间隙is0对比可得所述转子跑道径向位移为δ时任意径向位置r处所述指梁之间的间隙为:
30、
31、在一种可选的实施方式中,在“计算指尖密封片指尖靴前缘位置处的相邻两指梁之间的间隙为零时所对应的转子跑道径向位移量”的步骤中,还包括:随着所述转子跑道径向位移的不断增大,所述指尖靴上端部前缘最先与相邻所述指梁之间发生接触,当所述指尖靴上端部前缘与相邻所述指梁之间间隙为零时所对应的所述转子跑道径向位移量δmax,此时有:
32、
33、将(15)式代入(14)式可获得指尖密封结构径向临界工作位移的计算公式:
34、
35、在一种可选的实施方式中,在“计算所述转子跑道径向位移为δ时任意径向位置r处所述指梁之间的间隙”的步骤中,还包括:添加修正系数ck,得到添加修正系数ck后所述转子跑道径向位移为δ时任意径向位置r处所述指梁之间的间隙的计算公式为:
36、
37、在一种可选的实施方式中,在“计算指尖密封结构径向临界工作位移”的步骤中,还包括:添加修正系数ck,得到添加修正系数ck后指尖密封结构径向临界工作位移的计算公式为:
38、
39、在一种可选的实施方式中,所述修正系数ck的计算公式为:ck=k1df-k2db-k3is0+k4α-k5;其中:df为指尖靴上端部直径,db为指梁根圆直径,is0为自由状态下指梁之间间隙,α为单元周向圆心角。
40、在一种可选的实施方式中,所述指尖密封结构径向临界工作能力的定义为:指尖靴上端部前缘与相邻指梁之间的接触间隙与接触压强同时为零时所对应的转子跑道径向位移量。
41、在一种可选的实施方式中,将所述指尖密封结构的指梁简化为悬臂梁结构是基于以下两点:指梁圆弧型线曲率较小、指梁圆弧长度较短以及指尖密封与转子跑道之间的配合过盈量相较于指梁圆弧长度小得多,可将圆弧形的指梁结构近似简化为悬臂梁结构分析其形变特性;指梁的宽度远小于其长度,沿指梁宽度方向上任意取点,在某一方向上这些点到指梁根部的距离几乎一致,那么在相同集中载荷的作用下这些点的挠度差值近似为零。
42、有益效果:本发明提供的一种确定指尖密封结构径向临界工作能力的方法,通过上述步骤获取相应的计算数值,对指尖密封结构径向临界工作能力进行快速评估,从而解决了目前对于指尖密封结构径向临界工作能力的通用方法耗时耗力的问题。
- 还没有人留言评论。精彩留言会获得点赞!