一种点云目标检测方法及装置与流程
本技术涉及数据处理,具体而言,涉及一种点云目标检测方法及装置。
背景技术:
1、点云目标检测是自动驾驶环境感知领域中的关键问题之一,点云目标检测的目的是得到行驶环境的车辆、行人及障碍物等信息。随着感知技术的不断发展,人们对识别的准确性、实时性的要求越来越高。现有的点云目标检测方法,通常为基于point系列的3d点云检测方法,该系列检测算法检测速度慢,在现实工程应用中的适用性低。
技术实现思路
1、本技术实施例的目的在于提供一种点云目标检测方法及装置,能够实时对多种目标进行有效识别,检测速度快,适用性好。
2、本技术第一方面提供了一种点云目标检测方法,包括:
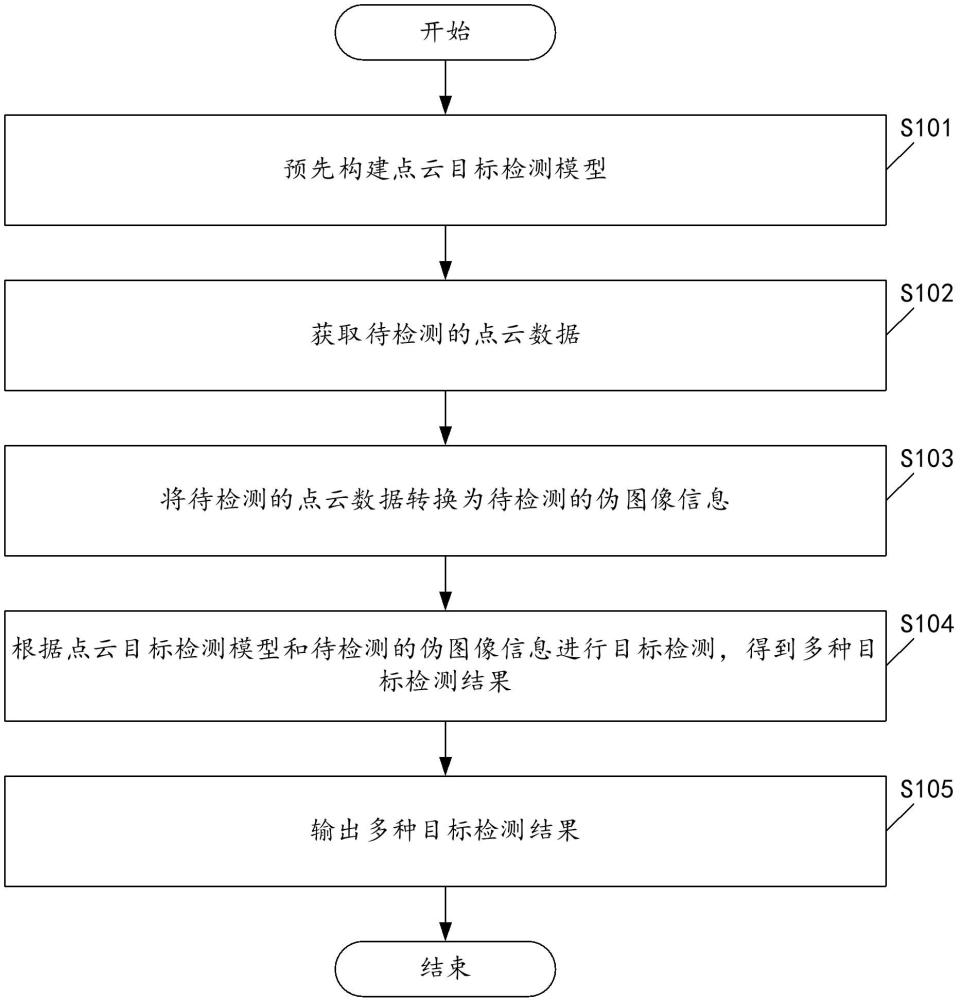
3、预先构建点云目标检测模型;
4、获取待检测的点云数据;
5、将所述待检测的点云数据转换为待检测的伪图像信息;
6、根据所述点云目标检测模型和所述待检测的伪图像信息进行目标检测,得到多种目标检测结果;
7、输出所述多种目标检测结果。
8、进一步地,所述预先构建点云目标检测模型,包括:
9、预先构建原始检测模型;其中,所述原始检测模型至少包括resnet主干网络、fpn采样网络、至少一个特征检测网络以及全连接层;
10、采集道路场景点云数据;
11、对所述道路场景点云数据进行标注,得到样本点云数据;
12、将所述样本点云数据转换为二维的伪图像信息;
13、通过所述resnet主干网络和所述fpn采样网络对所述伪图像信息进行特征提取,得到多尺度图像特征;
14、通过所述特征检测网络对所述多尺度图像特征进行细分类别的特征提取,得到多个类别对应的细分特征;其中,所述类别为车辆类别、行人类别或者障碍物类别;
15、通过所述全连接层对所述细分特征进行细化特征提取,得到每个所述类别对应的具体特征;其中,所述具体特征包括目标类别特征、目标中心点特征、目标长宽高特征以及目标角度特征;
16、基于所述具体特征和预设的损失函数对所述原始检测模型进行训练学习,得到训练好的点云目标检测模型。
17、进一步地,所述将所述样本点云数据转换为二维的伪图像信息,包括:
18、根据预设截取范围对所述样本点云数据进行截取处理,得到待转换点云数据;
19、对所述待转换点云数据进行伪像素划分,得到多个伪像素单元;
20、对所述伪像素单元进行高度压缩赋值,得到初始伪图像;
21、对所述初始伪图像中每个点的坐标进行优化处理,得到二维的伪图像信息。
22、进一步地,所述通过所述resnet主干网络和所述fpn采样网络对所述伪图像信息进行特征提取,得到多尺度图像特征,包括:
23、通过所述resnet主干网络对所述伪图像信息进行特征提取,得到目标特征;
24、通过所述fpn采样网络对所述伪图像信息进行图像采样,得到采样数据;
25、对所述目标特征和所述采样数据集进行融合处理,得到多尺度图像特征。
26、进一步地,所述预设的损失函数包括smooth_l1损失函数和focal-loss损失函数;
27、其中,所述smooth_l1损失函数用于对所述目标中心点特征、所述目标长宽高特征以及所述目标角度特征进行监督学习;
28、所述focal-loss损失函数用于对所述目标类别特征进行监督训练。
29、本技术第二方面提供了一种点云目标检测装置,所述点云目标检测装置包括:
30、构建单元,用于预先构建点云目标检测模型;
31、获取单元,用于获取待检测的点云数据;
32、转换单元,用于将所述待检测的点云数据转换为待检测的伪图像信息;
33、检测单元,用于根据所述点云目标检测模型和所述待检测的伪图像信息进行目标检测,得到目标检测结果;
34、输出单元,用于输出所述目标检测结果。
35、进一步地,所述构建单元包括:
36、构建子单元,用于预先构建原始检测模型;其中,所述原始检测模型至少包括resnet主干网络、fpn采样网络、至少一个特征检测网络以及全连接层;
37、采集子单元,用于采集道路场景点云数据;
38、标注子单元,用于对所述道路场景点云数据进行标注,得到样本点云数据;
39、转换子单元,用于将所述样本点云数据转换为二维的伪图像信息;
40、第一提取子单元,用于通过所述resnet主干网络和所述fpn采样网络对所述伪图像信息进行特征提取,得到多尺度图像特征;
41、第二提取子单元,用于通过所述特征检测网络对所述多尺度图像特征进行细分类别的特征提取,得到多个类别对应的细分特征;
42、第三提取子单元,用于通过所述全连接层对所述细分特征进行细化特征提取,得到每个所述类别对应的具体特征;其中,所述具体特征包括目标类别特征、目标中心点特征、目标长宽高特征以及目标角度特征;
43、训练学习子单元,用于基于所述具体特征和预设的损失函数对所述原始检测模型进行训练学习,得到训练好的点云目标检测模型。
44、进一步地,所述转换子单元包括:
45、截取模块,用于根据预设截取范围对所述样本点云数据进行截取处理,得到待转换点云数据;
46、划分模块,用于对所述待转换点云数据进行伪像素划分,得到多个伪像素单元;
47、压缩模块,用于对所述伪像素单元进行高度压缩赋值,得到初始伪图像;
48、优化模块,用于对所述初始伪图像中每个点的坐标进行优化处理,得到二维的伪图像信息。
49、进一步地,所述第一提取子单元包括:
50、提取模块,用于通过所述resnet主干网络对所述伪图像信息进行特征提取,得到目标特征;
51、采样模块,用于通过所述fpn采样网络对所述伪图像信息进行图像采样,得到采样数据;
52、融合模块,用于对所述目标特征和所述采样数据集进行融合处理,得到多尺度图像特征。
53、进一步地,所述预设的损失函数包括smooth_l1损失函数和focal-loss损失函数;
54、其中,所述smooth_l1损失函数用于对所述目标中心点特征、所述目标长宽高特征以及所述目标角度特征进行监督学习;
55、所述focal-loss损失函数用于对所述目标类别特征进行监督训练。
56、本技术第三方面提供了一种电子设备,包括存储器以及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行本技术第一方面中任一项所述的点云目标检测方法。
57、本技术第四方面提供了一种计算机可读存储介质,其存储有计算机程序指令,所述计算机程序指令被一处理器读取并运行时,执行本技术第一方面中任一项所述的点云目标检测方法。
58、本技术的有益效果为:该方法及装置能够实时对多种目标进行有效识别,检测速度快,适用性好。
- 还没有人留言评论。精彩留言会获得点赞!