本发明涉及废旧物资智能回收,具体为一种用于废旧物资的资源智能回收系统。
背景技术:
1、废旧物资的资源智能回收系统包括收集、分类、处理、再生、智能管理和教育宣传等环节,通过高效的技术和有效的管理,实现废旧物资的回收利用,促进可持续发展;
2、废旧物资的资源智能回收系统需要借助多种前沿技术和工具,包括机器学习、自动化技术、物联网、大数据和数据分析、rfid技术、社交媒体和宣传广告等,帮助回收系统实现高效、智能化的废物管理,促进环保事业的可持续发展;
3、现有的废旧物资的资源智能回收系统,无法根据回收容器内具体的废旧物资的位置情况调整回收容器的的位置,使回收容器利用最大化,无法根据回收容器内具体的废旧物资的重量判断是否可以对回收容器内的废旧物资进行压缩,使回收容器利用最大化,无法根据每个回收容器内的装载情况以及工作人员的响应情况,确定是否能够调用无废旧物资的回收容器,从而不影响投放人群的正常投放使用,其实用性也存在一定的局限性。
技术实现思路
1、本发明提供了一种用于废旧物资的资源智能回收系统,具备根据回收容器内具体的废旧物资的位置情况调整回收容器的的位置,根据回收容器内具体的废旧物资的重量判断是否可以对回收容器内的废旧物资进行压缩,使回收容器利用最大化,根据每个回收容器内的装载情况以及工作人员的响应情况,确定是否调用无废旧物资的回收容器,从而不影响投放人群的正常投放使用,使投放人群便于投放废旧物资的有益效果,解决了上述背景技术中所提到废旧物资智能回收的过程中,无法根据回收容器内具体的废旧物资的位置情况调整回收容器的的位置,使回收容器利用最大化,无法根据回收容器内具体的废旧物资的重量判断是否可以对回收容器内的废旧物资进行压缩,使回收容器利用最大化,无法根据每个回收容器内的装载情况以及工作人员的响应情况,确定是否能够调用无废旧物资的回收容器,从而不影响投放人群的正常投放使用,其实用性也存在一定的局限性的问题。
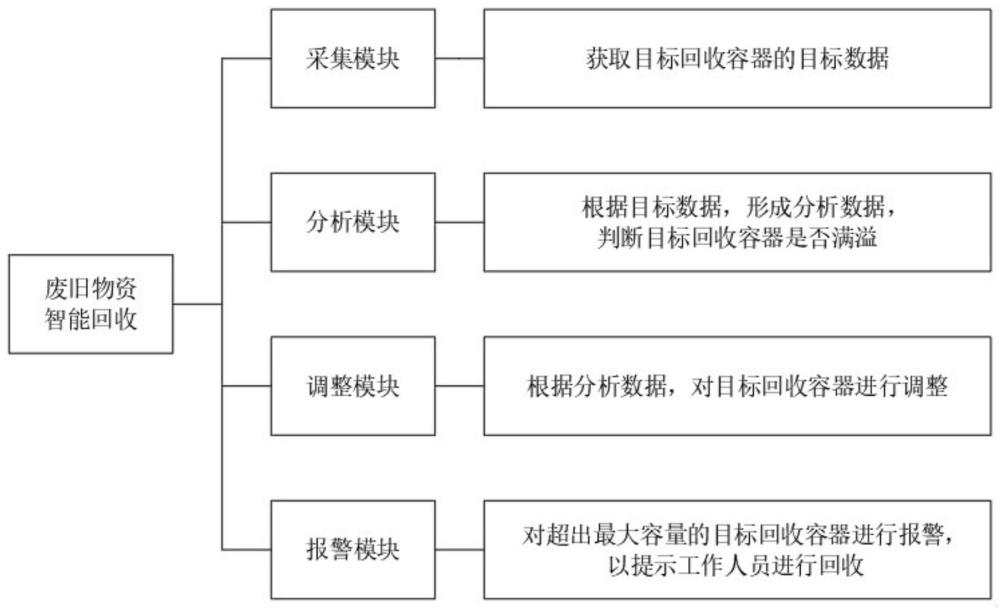
2、本发明提供如下技术方案:一种用于废旧物资的资源智能回收系统,包括:
3、采集模块:获取目标回收容器的目标数据;
4、分析模块:根据目标数据,形成分析数据,判断目标回收容器是否满溢;
5、调整模块:根据分析数据,对目标回收容器进行调整;
6、报警模块:对超出最大容量的目标回收容器进行报警,以提示工作人员进行回收。
7、作为本发明所述用于废旧物资的资源智能回收系统的一种可选方案,其中:所述获取目标回收容器的目标数据,具体包括:
8、所述目标回收容器设置有废旧物资投放口;
9、所述废旧物资投放口设置有用于检测目标回收容器是否满溢的第一检测模块;
10、获取第一检测模块的初始信号值,记为a;
11、若第一检测模块检测到物品,则初始信号值a改变,将改变后的初始信号值定为变化信号值,记为b。
12、作为本发明所述用于废旧物资的资源智能回收系统的一种可选方案,其中:所述根据目标数据,形成分析数据,判断目标回收容器是否满溢,具体包括:
13、s10、设定检测时间阈值;
14、s11、获取第一检测模块的变化信号值b的采集时间,记为t1;
15、s12、获取当前时间,记为t2;
16、s13、若第一检测模块为变化信号值b、且当前时间t2-采集时间t1>检测时间阈值,则执行目标回收容器判定策略。
17、作为本发明所述用于废旧物资的资源智能回收系统的一种可选方案,其中:所述执行目标回收容器判定策略,具体包括:
18、所述目标回收容器上方设置有若干用于检测目标回收容器内是否均匀装满废旧物资的第二检测模块;
19、将目标回收容器内的废旧物资定为目标检测物;
20、以第二检测模块为原点,向地面作向量方向,将该向量方向定为目标方向;
21、获取第二检测模块以目标方向对目标检测物的检测距离,将该距离定为目标距离,记为c;
22、依次提取任意两个目标距离c进行比较,并分别记为c1和c2;
23、若目标距离c1-目标距离c2>0,则将目标距离c1定为第一目标距离,将目标距离c2定为第二目标距离;
24、将最终确定的第一目标距离为最远目标距离;
25、将最终确定的第二目标距离为最近目标距离;
26、设定比较阈值;
27、若最远目标距离-最近目标距离>比较阈值,则执行调整策略;
28、若最远目标距离-最近目标距离≤比较阈值,则执行压力判定策略。
29、作为本发明所述用于废旧物资的资源智能回收系统的一种可选方案,其中:所述执行调整策略,具体为:
30、所述目标回收容器下方设置有第一调整模块;
31、以目标方向为视角方向,获取废旧物资投放口的中点;
32、获取目标回收容器的中心点的坐标,记为(x1,y1);
33、获取废旧物资投放口的中点的坐标,记为(x2,y2);
34、以目标回收容器的中心点为原点,向废旧物资投放口的中点作向量方向,将该向量方向定为第一目标调整方向;
35、提取最远目标距离对应的第二检测模块定为目标第二检测模块;
36、以目标第二检测模块为原点、以目标方向为向量方向作射线,将射线与目标检测物的交点定为目标点;
37、以目标方向为视角方向、以目标点为原点,向目标回收容器的每个边缘线作垂线;
38、获取每个垂线的垂线长度,记为d;
39、依次提取任意两个垂线长度d进行比较,并分别记为d1和d2;
40、若垂线长度d1-垂线长度d2>0,则将垂线长度d2定为第一垂线长度;
41、将最终确定的第一垂线长度定为目标垂线长度;
42、获取目标点的坐标,记为(x3,y3);
43、获取目标垂线长度对应的目标回收容器的边缘线;
44、获取目标垂线长度与目标回收容器的边缘线的交点的坐标,记为(x4,y4);
45、以目标点为原点,向目标垂线长度与目标回收容器的边缘线的交点作向量方向,将该向量方向定为第二目标调整方向;
46、控制第一调整模块旋转;
47、若(y2-y1)÷(x2-x1)≠(y4-y3)÷(x4-x3),则继续控制第一调整模块旋转,直至(y2-y1)÷(x2-x1)=(y4-y3)÷(x4-x3);
48、若(y2-y1)÷(x2-x1)=(y4-y3)÷(x4-x3),则获取第一目标调整方向和第二目标调整方向;
49、若第一目标调整方向与第二目标调整方向相同,则控制第一调整模块继续旋转;
50、若第一目标调整方向与第二目标调整方向相同,则控制第一调整模块停止旋转;
51、执行s10-s13。
52、作为本发明所述用于废旧物资的资源智能回收系统的一种可选方案,其中:所述执行压力判定策略,具体为:
53、获取目标回收容器在最大容量时的重量,定为第一重量,记为g1;
54、所述第一调整模块中设置有重量检测装置;
55、通过重量检测装置,获取目标回收容器的净重,定为第二重量,记为g2;
56、获取最远目标距离-最近目标距离≤比较阈值时的目标回收容器的重量,定为第三重量,记为g3;
57、若g1-g2>g3-g2,则执行压缩调整策略;
58、若g1-g2≤g3-g2,则执行报警调整策略。
59、作为本发明所述用于废旧物资的资源智能回收系统的一种可选方案,其中:所述执行压缩调整策略,具体为:
60、所述第一调整模块包括用于放置目标回收容器的第一托盘;
61、所述第一托盘下方中心点位置连接有第一转轴;
62、所述第一转轴与第一托盘连接处还设置有一圈用于检测第一托盘上目标回收容器的重力是否平衡的压力检测装置,所述第一转轴另一端固定连接有球形端口;
63、所述第一转轴下方设置有支架,所述支架上开设有球形卡槽;
64、所述球形端口与球形卡槽卡合连接;
65、当g1-g2>g3-g2,通过各压力检测装置获取目标回收容器各处的压力值,记为e;
66、设定压缩值;
67、依次提取任意两个压力值e计算压力比值,并分别记为e1和e2,则压力比值=e1÷e2;
68、分别计算岁目标回收容器内不同位置的压缩操作值,压缩操作值=压力值e×(1÷压力比值);
69、根据各压力检测装置对应的压缩操作值,对目标回收容器内的废旧物资进行压缩;
70、执行s10-s13;
71、依次提取任意两个压力值e1和e2进行比较;
72、若压力值e1-压力值e2>0,则将压力值e1定为第一目标压力,将压力值e2定为第二目标压力;
73、将最终确定的第一目标压力为最大目标压力;
74、将最终确定的第二目标距离为最小目标压力;
75、设定压力阈值;
76、若最大目标压力-最小目标压力>压力阈值,则提取最小目标压力对应的压力检测装置,将该压力检测装置定为目标压力检测装置;
77、获取目标压力检测装置的位置,定为目标位置;
78、获取目标压力检测装置对应的压缩操作值,定为目标压缩操作值;
79、对目标回收容器内的目标位置,以目标压缩操作值继续压缩,直至最大目标压力-最小目标压力≤压力阈值;
80、若最大目标压力-最小目标压力≤压力阈值,则执行报警调整策略。
81、作为本发明所述用于废旧物资的资源智能回收系统的一种可选方案,其中:所述执行报警调整策略,具体包括:
82、所述目标回收容器上设置有第一报警装置;
83、所述第一报警装置通讯连接有工作人员处的第二报警装置;
84、所述第一报警装置进行报警,并关闭废旧物资投放口,将该第一报警装置所对应的目标回收容器定为目标清理容器;
85、所述第一报警装置向第二报警装置发送满溢信号,以及目标清理容器的定位;
86、所述第二报警装置收取满溢信号,并进行报警,同时显示目标清理容器的定位,将目标清理容器的定位定为第一位置;
87、获取工作人员的定位,将工作人员的定位定为第二位置;
88、设定等待时间,记为h1;
89、获取当前时间,记为h2;
90、获取第二报警装置收取满溢信号时的时间,记为h3;
91、若h2-h3<h1,且第一位置=第二位置,则工作人员对目标清理容器进行清理并更换为无废旧物资的目标回收容器;
92、若h2-h3=h1,且第一位置=第二位置,则工作人员对目标清理容器进行清理并更换为无废旧物资的目标回收容器;
93、若h2-h3>h1,且第一位置≠第二位置,则执行备选调整策略。
94、作为本发明所述用于废旧物资的资源智能回收系统的一种可选方案,其中:所述执行备选调整策略,还包括:
95、所述第一调整模块下方安装有第二调整模块;
96、设定目标回收容器的数量,定为目标数量,记为f;
97、所述第二调整模块包括用于安装目标数量的目标回收容器的第二托盘;
98、所述第二托盘下方安装有第二转轴;
99、获取第二托盘上每个目标回收容器的当前重量,记为g4;
100、若g4-g2≠0,则关闭废旧物资投放口,并向投放废旧物资的人群推送最近的目标回收容器的位置;
101、若g4-g2=0,则将该目标回收容器定为备用目标回收容器;
102、将备用目标回收容器的废旧物资回收类型更改为目标清理容器的废旧物资回收类型;
103、获取第一位置的坐标和所有的第二位置的坐标;
104、计算所有工作人员与目标清理容器的距离,定为目标判定距离,目标判定距离=第二位置的坐标-第一位置的坐标;
105、调选数值最小的目标判定距离对应的工作人员到达第一位置对目标清理容器进行清理;
106、设定替代时间,记为h4;
107、获取当前时间h2;
108、获取确定备用目标回收容器的时间,记为h5
109、若h2-h5>h4,且第一位置≠第二位置,关闭备用目标回收容器的原废旧物资回收类型的废旧物资投放口,并向投放废旧物资的人群推送最近的目标回收容器的位置;
110、若h2-h5≤h4,且第一位置=第二位置,则工作人员对目标清理容器进行清理并更换为无废旧物资的目标回收容器,并将目标清理容器的废旧物资回收类型更改为备用目标回收容器的原废旧物资回收类型;
111、当投放废旧物资的人群投放目标清理容器的废旧物资回收类型时,将备用目标回收容器旋转至目标清理容器的废旧物资投放口处;
112、当投放废旧物资的人群投放目标清理容器的废旧物资回收类型的废旧物资结束时,将备用目标回收容器旋转至备用目标回收容器的废旧物资投放口处;
113、当投放废旧物资的人群投放备用目标回收容器的原废旧物资回收类型时,将更换后的目标清理容器旋转至备用目标回收容器的废旧物资投放口处;
114、当投放废旧物资的人群投放备用目标回收容器的原废旧物资回收类型的废旧物资结束时,将更换后的目标清理容器旋转至目标清理容器的废旧物资投放口处。
115、本发明具备以下有益效果:
116、1、该用于废旧物资的资源智能回收系统,通过红外传感器检测废旧物资投放口是否长时间有物品存在,若长时间有物品存在,则通过超声波传感器监测目标回收容器内各废旧物品的位置,根据回收容器内具体的废旧物资的位置情况判断目标回收容器内是否装满废旧物资,若未装满废旧物资,则调整目标回收容器的的位置,使回收容器利用最大化。
117、2、该用于废旧物资的资源智能回收系统,通过重量检测装置和压力检测装置获取目标回收容器内不同区域的重量和压力,从而根据回收容器内具体的废旧物资的重量判断是否可以对回收容器内的废旧物资进行压缩,若存在压缩空间,则根据不同区域的压力获取不同的压缩空间,从而采用不同的压缩量对废旧物资进行压缩,使回收容器利用最大化。
118、3、该用于废旧物资的资源智能回收系统,根据每个回收容器内的装载情况以及工作人员的响应情况,确定工作人员是否能够及时对装满的目标回收容器进行清理回收,若不能够及时清理回收,则调用无废旧物资的回收容器,从而不影响投放人群的正常投放使用,使投放人群便于投放废旧物资。