大型湖泊场景建模方法、系统、计算机设备及存储介质
本发明涉及数字孪生湖泊的大场景建模,尤其是涉及一种大型湖泊场景建模方法、系统、计算机设备及存储介质。
背景技术:
1、湖泊生态系统具有重要的生态价值,为人类生产生活提供重要的水源保障,具有涵养水源、调节气候、净化水质和调蓄水资源等重要作用。随着三维建模与数字孪生技术的发展,湖泊大场景三维建模可行性已得到验证。随着卫星遥感对地观测技术的发展,高分辨率的卫星遥感影像经过辐射校正、大气校正等预处理之后,可为地理大场景三维模型的构建提供高精度数据源。
2、目前,主流的三维建模软件skectchup、3dmax、ue4对于大型地理场景的三维模型的构建比较困难,因此,现有的三维场景建模往往都是聚焦于数字校园尺度、数字城市尺度。此外,传统的三维建模技术需要技术人员通过实景拍摄、激光扫描等方式获取模型参考图,该方式不仅耗时耗力,又无法实现大规模的三维场景建模。
技术实现思路
1、本发明旨在至少改善现有技术中存在的技术问题之一。为此,本发明提出了一种大型湖泊场景建模方法、系统、计算机设备及存储介质。
2、一种大型湖泊场景建模方法,其中,包括如下步骤:
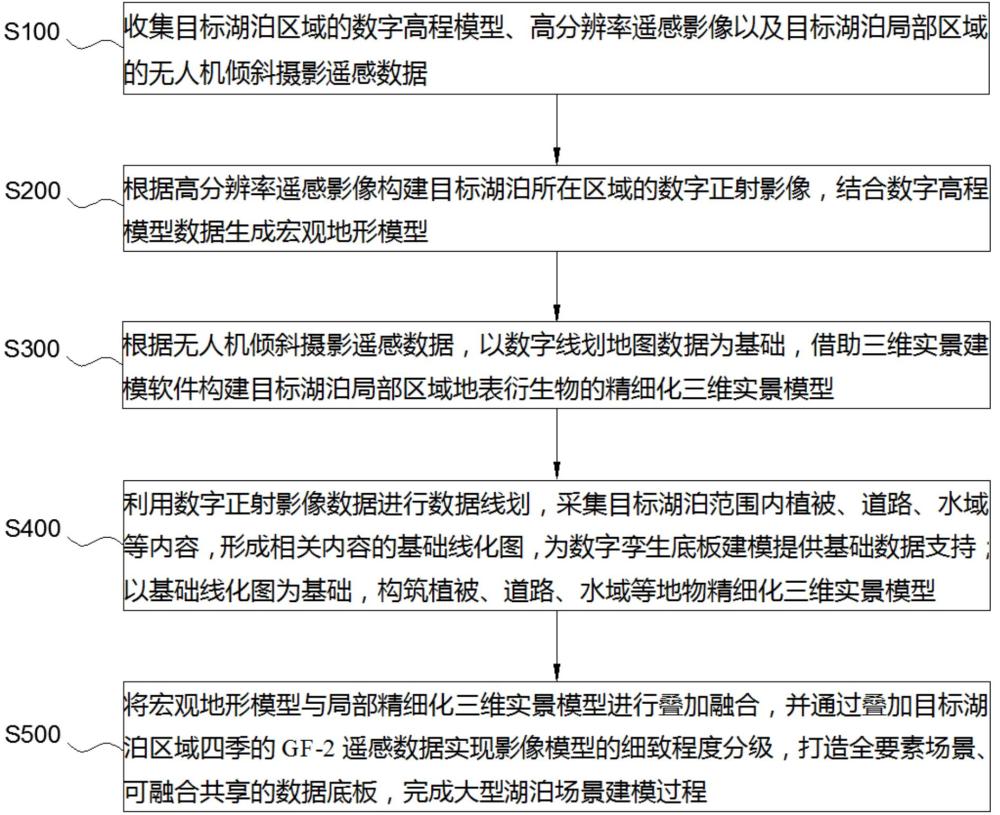
3、步骤s100,收集目标湖泊区域的数字高程模型、高分辨率遥感影像以及目标湖泊局部区域的无人机倾斜摄影遥感数据;
4、步骤s200,根据高分辨率遥感影像构建目标湖泊所在区域的数字正射影像,结合数字高程模型数据生成宏观地形模型;
5、步骤s300,根据无人机倾斜摄影遥感数据,以数字线划地图数据为基础,借助三维实景建模软件构建目标湖泊局部区域地表衍生物的精细化三维实景模型;
6、步骤s400,利用数字正射影像数据进行数据线划,采集目标湖泊范围内植被、道路、水域内容,形成基础线化图;以基础线化图为基础,构筑植被、道路、水域的地物精细化三维实景模型,其中地物精细化三维实景模型中的纹理直接从数字正射影像或无人机倾斜摄影遥感数据中截取制作;
7、步骤s500,将宏观地形模型与局部精细化三维实景模型进行叠加融合,并通过叠加目标湖泊区域四季的gf-2遥感数据实现影像模型的细致程度(level of details,lod)分级,打造全要素场景、可融合共享的数据底板,完成大型湖泊场景建模过程。
8、根据本发明的大型湖泊场景建模方法,可形成大型湖泊的宏观建模场景,实现湖泊自然与人文景观一体化三维实景模型,从二维平面空间出发向三维空间延伸,支撑大型湖泊生态景观监测与管理,服务湖泊生态系统的数字与智能化建设。
9、本发明以一种较低成本的技术方案实现了大型湖泊的大场景建模工作,同时实现宏观场景建模与局部精细化实景三维建模的融合与更新,为湖泊大场景建模提供了一种经济、快速、可操作性强的新方法。
10、在第一方面的一种可能的实现方式中,所述步骤s200包括:
11、利用envi软件对收集的亚米级遥感影像进行预处理工作,并对预处理工作后的影像进行后处理和优化,以消除噪点、增强细节,最后输出目标湖泊区域数字正射影像数据,其中所述预处理工作包括几何校正、大气校正、图像拼接、色彩校正和平衡等;
12、宏观地形模型的建构,在地图绘制软件(global mapper)中导入数字高程模型数据进行三维地形生产,以aster gdem高程数据集为数据源,输出为矢量格式的高程网格;将生成的dem数据导入3ds max软件中进行平滑处理,对高程网格进行平整、简化,选择与遥感影像相同的纹理和材质对其进行纹理化、渲染和优化,实现遥感影像与高程网格的融合,创建与真实场景相同的宏观三维地形模型。
13、在第一方面的一种可能的实现方式中,所述步骤s300包括:
14、步骤s310,利用三维实景建模(context capture)软件对数据进行空中三角测量,获取影像的外方位元素;对数据进行多视影像密集匹配获得高密度数字点云、构建tin模型、自动纹理切片映射;
15、步骤s320,对形成的三维实景模型进行修饰,如区域漏空、变形等,同时利用点位测量信息对三维实景模型进行质量检查;
16、步骤s330,最后在三维实景模型修饰完毕和质量检查合格后,形成精细化三维实景模型。
17、在第一方面的一种可能的实现方式中,在所述步骤s400中,基础线化图数据的生产步骤包括:
18、步骤s410,影像解译,基于在先处理的dom数据,根据特定目标和要素类型,从影像中提取需要的要素,如水域、道路、建筑等;
19、步骤s420,数据编辑,对解译得到的地理要素进行编辑和校正,包括删除误解译的要素、修正形状和位置等,以确保基础线化图的准确性和一致性;
20、步骤s430,属性添加,为每个地理要素添加属性信息,如道路的名称、类型、宽度等;
21、步骤s440,数据转换,将解译和编辑完成的地理要素数据转换为矢量格式,通常是矢量文件格式(如shapefile、file geodatabase等),以便后续的空间分析和应用;
22、步骤s450,基础线化图校正,对生成的基础线化图数据进行质量控制和校正,具体包括检查拓扑关系、边界一致性、要素完整性等,并进行必要的修正和调整;
23、步骤s460,数据输出,将校正完成的基础线化图数据输出为最终的矢量文件。
24、在第一方面的一种可能的实现方式中,步骤s400中,构筑植被、道路、水域等地物精细化三维实景模型包括:利用3ds max进行建模,以基础线化图数据为底座,从高分辨率遥感影像或无人机倾斜摄影遥感数据中截取图片用于纹理映射,通过设置反射效果、光照属性增加模型的真实性。
25、在第一方面的一种可能的实现方式中,步骤s500中,将宏观地形模型与局部精细化三维实景模型进行叠加融合,包括:将context capture所构建的建筑等地表人工衍生物模型转换为.fbx格式导入虚拟引擎ue4中,对模型出现区域漏空、变形等情况进行修饰,利用渲染引擎对模型进一步渲染优化;最后将优化后的模型以等比例形式置于宏观三维地形模型之上。
26、根据本发明第二方面实施例的大型湖泊场景建模系统,其中,包括:
27、收集模块,用于收集目标湖泊区域的数字高程模型、高分辨率遥感影像以及目标湖泊局部区域的无人机倾斜摄影遥感数据;
28、第一生成模块,用于根据高分辨率遥感影像构建目标湖泊所在区域的数字正射影像,结合数字高程模型数据生成宏观地形模型;
29、预构建模块,用于根据无人机倾斜摄影遥感数据,以数字线划地图数据为基础,借助三维实景建模软件构建目标湖泊局部区域地表衍生物的精细化三维实景模型;
30、第二生成模块,用于利用数字正射影像数据进行数据线划,采集目标湖泊范围内植被、道路、水域内容,形成基础线化图;以基础线化图为基础,构筑植被、道路、水域的地物精细化三维实景模型,其中地物精细化三维实景模型中的纹理直接从数字正射影像或无人机倾斜摄影遥感数据中截取制作;
31、叠合模块,用于将宏观地形模型与局部精细化三维实景模型进行叠加融合,并通过叠加目标湖泊区域四季的gf-2遥感数据实现影像模型的细致程度分级,打造全要素场景、可融合共享的数据底板,完成大型湖泊场景建模过程。
32、根据本发明第三方面实施例的一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其中,所述处理器执行所述计算机程序时实现上述大型湖泊场景建模方法的步骤。
33、根据本发明第四方面实施例的一种计算机存储介质,所述计算机存储介质存储有计算机程序,其中,所述计算机程序被处理器执行时实现如上述大型湖泊场景建模方法的步骤。
34、本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!