放置位姿参数确定方法、装置、计算机设备和存储介质与流程
本技术涉及智能控制,特别是涉及一种放置位姿参数确定方法、装置、计算机设备、存储介质和计算机程序产品。
背景技术:
1、采用智能机械臂来进行对象抓取或放置的方法在工业领域逐渐被应用,它通过将机器视觉与机械臂结合的方式,感知外部环境并赋予机械臂智能作业的能力,能够有效改善作业环境,减少人力劳动,推动了企业生产自动化的效率。
2、目前,以采用智能机械臂来在精密仪器进行对象放置为例,确定智能机械臂的放置位姿参数的方法包括:在每次进行对象放置的过程中,采用视觉感知相机采集放置过程中当前待放置对象的二维图像信息,并通过当前待放置对象的二维图像信息,计算智能机械臂要放置待放置对象时放置的位置和姿态信息,基于智能机械臂的放置位置和姿态信息,引导智能机械臂对上样区的待放置目标进行放置。然而,目前的这一技术,无法高效确定智能机械臂的放置位姿参数。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种高效的放置位姿参数确定方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
2、第一方面,本技术提供了一种放置位姿参数确定方法,包括:
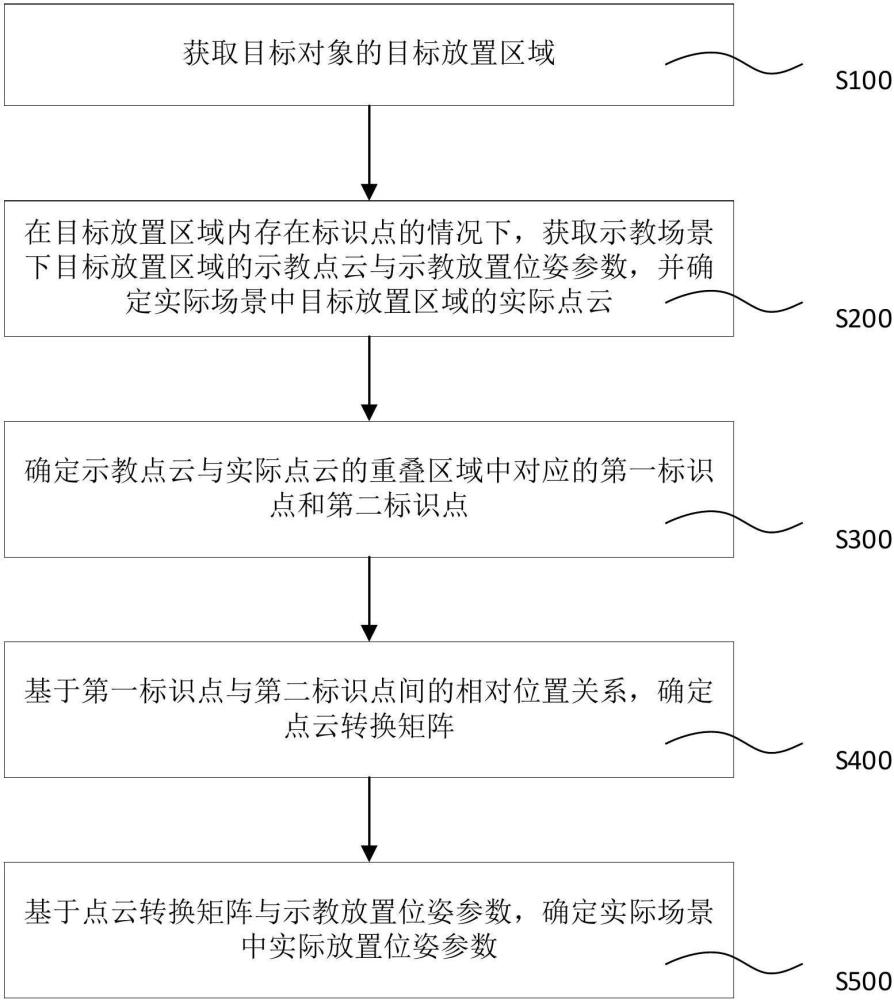
3、获取目标对象的目标放置区域;
4、在目标放置区域内存在标识点的情况下,获取示教场景下目标放置区域的示教点云与示教放置位姿参数,并确定实际场景中目标放置区域的实际点云;
5、确定示教点云与实际点云的重叠区域中对应的第一标识点和第二标识点,第一标识点位属于示教点云,第二标识点属于实际点云;
6、基于第一标识点与第二标识点间的相对位置关系,确定点云转换矩阵;
7、基于点云转换矩阵与示教放置位姿参数,确定实际场景中实际放置位姿参数。
8、在一些实施例中,在基于点云转换矩阵与示教放置位姿参数,确定实际场景中实际放置位姿参数之后,还包括:
9、生成、并推送第一放置消息,第一放置消息携带实际放置位姿参数。
10、在一些实施例中,获取目标对象的目标放置区域之前,还包括:
11、获取目标对象在初始放置区域内的初始点云信息;
12、基于初始点云信息,确定目标对象的对象点云信息;
13、基于对象点云信息,生成、并推送第二放置消息;第二放置消息用于控制放置设备将目标对象从初始放置区域放置至目标抓取区域。
14、在一些实施例中,基于初始点云信息,确定目标对象的对象点云信息,包括:
15、获取目标对象放置在初始放置区域时的目标对象平面模型;
16、确定初始点云信息与目标对象平面模型之间的距离;
17、基于距离,对初始点云信息进行对象点云信息的分割,得到目标对象的对象点云信息。
18、在一些实施例中,基于点云转换矩阵与示教放置位姿参数,确定实际场景中放置设备的实际放置位姿参数,包括:
19、获取示教点云的示教点云坐标系与放置设备的第一示教坐标系间的第一转换矩阵、以及示教点云的实际点云坐标系与放置设备的第一实际坐标系间的第二转换矩阵;示教放置位姿参数是放置设备的第一示教坐标系对应的放置姿参数,实际放置位姿参数是放置设备的第一实际坐标系对应的放置位姿参数;
20、基于第一转换矩阵,确定示教放置位姿参数在示教点云坐标系中对应的第一放置位姿参数;
21、基于点云转换矩阵,确定第一放置位姿参数在实际点云坐标系中对应的第二放置位姿参数;
22、基于第二转换矩阵,确定第二放置位姿参数在第一实际坐标系中对应的实际放置位姿参数。
23、在一些实施例中,第一转换矩阵的获取过程包括:
24、获取示教点云的示教点云坐标系与放置设备的第二示教坐标系间的第三转换矩阵、以及放置设备的第二示教坐标系与放置设备的第一示教坐标系间的第四转换矩阵;
25、基于第三转换矩阵与第四转换矩阵,获取第一转换矩阵。
26、在一些实施例中,第二转换矩阵的获取过程包括:
27、获取实际点云的实际点云坐标系与放置设备的第二实际坐标系间的第五转换矩阵、以及放置设备的第二实际坐标系与放置设备的第一实际坐标系间的第六转换矩阵;
28、基于第五转换矩阵与第六转换矩阵,获取第二转换矩阵。
29、第二方面,本技术还提供了一种放置位姿参数确定装置,包括:
30、目标放置区域获取模块,用于获取目标对象的目标放置区域;
31、示教与实际点云获取模块,用于在目标放置区域内存在标识点的情况下,获取示教场景下目标放置区域的示教点云与示教放置位姿参数,并确定实际场景中目标放置区域的实际点云;
32、标识点匹配模块,用于确定示教点云与实际点云的重叠区域中对应的第一标识点和第二标识点,第一标识点位属于示教点云,第二标识点属于实际点云;
33、点云转换矩阵确定模块,用于基于第一标识点与第二标识点间的相对位置关系,确定点云转换矩阵;
34、放置位姿参数确定模块,用于基于点云转换矩阵与示教放置位姿参数,确定实际场景中实际放置位姿参数。
35、第三方面,本技术还提供了一种计算机设备,包括存储器和处理器,存储器存储有计算机程序,处理器执行计算机程序时实现以下步骤:
36、获取目标对象的目标放置区域;
37、在目标放置区域内存在标识点的情况下,获取示教场景下目标放置区域的示教点云与示教放置位姿参数,并确定实际场景中目标放置区域的实际点云;
38、确定示教点云与实际点云的重叠区域中对应的第一标识点和第二标识点,第一标识点位属于示教点云,第二标识点属于实际点云;
39、基于第一标识点与第二标识点间的相对位置关系,确定点云转换矩阵;
40、基于点云转换矩阵与示教放置位姿参数,确定实际场景中实际放置位姿参数。
41、第四方面,本技术还提供了一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现以下步骤:
42、获取目标对象的目标放置区域;
43、在目标放置区域内存在标识点的情况下,获取示教场景下目标放置区域的示教点云与示教放置位姿参数,并确定实际场景中目标放置区域的实际点云;
44、确定示教点云与实际点云的重叠区域中对应的第一标识点和第二标识点,第一标识点位属于示教点云,第二标识点属于实际点云;
45、基于第一标识点与第二标识点间的相对位置关系,确定点云转换矩阵;
46、基于点云转换矩阵与示教放置位姿参数,确定实际场景中实际放置位姿参数。
47、第五方面,本技术还提供了一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:
48、获取目标对象的目标放置区域;
49、在目标放置区域内存在标识点的情况下,获取示教场景下目标放置区域的示教点云与示教放置位姿参数,并确定实际场景中目标放置区域的实际点云;
50、确定示教点云与实际点云的重叠区域中对应的第一标识点和第二标识点,第一标识点位属于示教点云,第二标识点属于实际点云;
51、基于第一标识点与第二标识点间的相对位置关系,确定点云转换矩阵;
52、基于点云转换矩阵与示教放置位姿参数,确定实际场景中实际放置位姿参数。
53、上述放置位姿参数确定方法、装置、计算机设备、存储介质和计算机程序产品,采用示教场景与实际场景中目标放置区域的点云的重叠区域的标识点匹配方法,准确确定示教场景与实际场景中点云的变换矩阵,从而实现只需一次示教放置,就能够在后续基于示教场景中示教放置位姿参数,高效确定实际场景中实际放置位姿参数。
- 还没有人留言评论。精彩留言会获得点赞!