一种基于CNC的多轴机床加工用控制系统的制作方法
本发明涉及多轴机床,具体涉及一种基于cnc的多轴机床加工用控制系统。
背景技术:
1、多轴机床是指一台机床上除了具有x、y、z三个移动坐标轴外,至少还有1-2个旋转坐标轴,即4-5轴的数控机床;
2、多轴机床广泛应用于机械行业多孔零部件的钻孔及攻丝加工。如汽车、摩托车多孔零部件:发动机箱体、铝铸件壳体、制动鼓、刹车盘、转向器、轮毂、差速壳、轴头、半轴、车桥等,泵类、阀类、液压元件、太阳能配件等等。
3、然而,目前的多轴机床在对工件进行加工时,机床上各工位的组成部件出现微小松动或位置偏移,会导致多轴机床生产的工件出现误差,这些误差虽暂时不会导致多轴机床产出工件不合格,但误差的日益累积,终将导致多轴机床产出工件误差过大,进而不合格;
4、现有技术中,往往多倾向于多轴机床的已有故障检测,无法对多轴机床上已存在故障倾向的工位进行捕捉,进而在多轴机床生产工件过程中,导致生产工件的品控流程耗费了比例相对较大的成本支出。
技术实现思路
1、针对现有技术所存在的上述缺点,本发明提供了一种基于cnc的多轴机床加工用控制系统,解决了上述背景技术中提出的技术问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:
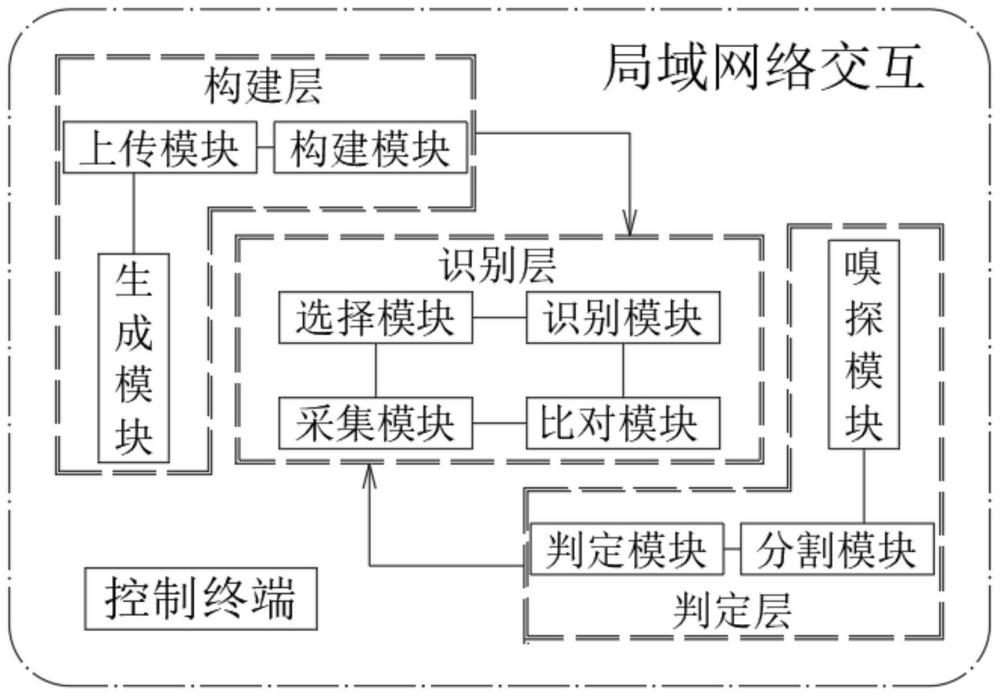
3、一种基于cnc的多轴机床加工用控制系统,包括控制终端、构建层、识别层及判定层;
4、控制终端,是系统的主控端,用于发出控制命令;
5、制造零件的规格参数通过构建层上传,构建层同步基于上传的零件规格参数构建零件三维模型,并基于零件三维模型获取零件三维模型各视角模型图像,以获取的零件三维模型各视角图像组成对照数据群,识别层同步于对照数据群中选择模型图像,并基于选择的模型图像来源视角,对多轴机床输出的零件进行图像采集,基于模型图像来源视角对模型图像及采集的零件图像进行相似性比对,判定层进一步接收相似性比对结果,判定零件是否合格,并在判定结果为零件不合格时,基于零件图像及模型图像嗅探多轴机床上存在误差的加工工位;
6、所述识别层包括选择模块、识别模块、采集模块及比对模块,选择模块用于获取构建层中求得的对照数据群,于对照数据群中选择模型图像,识别模块用于接收选择模块选择的模型图像,对各模型图像的来源视角进行识别,采集模块用于接收识别模块中识别到的各模型图像来源视角,基于模型图像来源视角对多轴机床上输出的零件进行图像采集,比对模块用于比对相同的来源视角下对应的模型图像及采集零件图像的相似性,并将相似性比对结果向判定层反馈;
7、所述比对模块中模型图像与采集的零件图像的相似性通过下式进行求取,公式为;
8、
9、式中:sim(p,q)为模型图像p与零件图像q的相似性;w为图像中特征点的集合;为模型图像p中第ε个特征点的加权形状因子;为模型图像p中所有特征点的加权形状因子均值;为零件图像q中第ε个特征点的加权形状因子;为零件图像q中所有特征点的加权形状因子均值;
10、其中,sim(p,q)取值越大,则表示模型图像与零件图像越相似,反之,则表示模型图像与零件图像越不相似。
11、更进一步地,所述构建层包括上传模块、构建模块及生成模块,上传模块用于上传零件的规格参数,构建模块用于获取上传模块中上传的零件规格参数,基于零件规格参数构建零件三维模型,生成模块用于设定模型图像捕捉逻辑,基于模型图像捕捉逻辑,于零件三维模型上捕捉模型图像;
12、其中,上传模块中上传的零件规格参数包括:零件上各棱边长度,及各棱边相互相对的倾斜角度及距离,构建模块中基于零件规格参数构建的零件三维模型由若干组点与线所组成,生成模块中基于模型图像捕捉逻辑捕捉的模型图像的组合即对照数据群。
13、更进一步地,所述生成模块中设定的模型图像捕捉逻辑基于零件三维模型的复杂程度进行设定,模型图像捕捉逻辑表示为:
14、
15、式中:m为模型图像捕捉数量;η为零件三维模型的面数总量;f为零件三维模型上棱角点的总量;n为零件三维模型上棱角点的集合;αi为零件三维模型上,第i个棱角点于模型构建空间内的相对位置坐标;βnear为零件三维模型上,相距第i个棱角点距离最近的棱角点于模型构建空间内的相对位置坐标;τ为常数;
16、其中,模型图像捕捉数量m采用进一步法向上取整数,y(x)表示距离计算函数,则y(αi-βnear)表示αi与βnear之间的直线距离,常数2≥τ≥1,且服从的值越大,则常数τ取值越大的设定逻辑。
17、更进一步地,用于表示零件三维模型的复杂程度,模型图像捕捉数量m在求取后,进一步基于指定视角每围绕多轴机床输出零件公转度执行一次模型图像的捕捉操作,捕捉到的所有模型图像组合,记作对照数据群;
18、其中,模型图像在捕捉时应用的指定视角,为零件三维模型周边能够捕捉到零件三维模型上面数最多的一组视角。
19、更进一步地,所述选择模块于对照数据群中选择模型图像时,对各模型图像的信息熵进行求取,基于模型图像信息熵求取结果对对照数据群中模型图像进行排序,进一步于完成排序的对照数据群中对模型图像进行选择;
20、模型图像选择时,零件三维模型的复杂程度越高,选择的模型图像数量越多;
21、模型图像选择时,基于模型图像排序结果,于排序的模型图像的首尾位置分别选择模型图像,零件三维模型的复杂程度越高,则的值越大,反之,则越小;
22、其中,u为于排序的模型图像中前置位选择的模型图像数量;v为于排序的模型图像中后置位选择的模型图像数量;模型图像的信息熵值越大,则于对照数据群中排序位置越靠前。
23、更进一步地,所述模型图像的信息熵通过下式进行求取,公式为:
24、
25、式中:h为模型图像的信息熵;f(i,j)为模型图像中联合特征(i,j)的数量;n为模型图像的尺度;
26、其中,模型图像的信息熵h越大,则表示模型图像中包含的信息量越多,对模型合格概率的影响越大,反之,则表示模型图像中包含的信息量越少,对模型合格概率的影响越小。
27、更进一步地,所述构建层中构建的零件三维模型于模型构建空间内的放置姿态与多轴机床上输出的零件放置姿态相同;
28、其中,识别模块中识别的模型图像来源视角包括:指定视角及绕多轴机床输出零件公转角度。
29、更进一步地,所述判定层包括判定模块、分割模块及嗅探模块,判定模块用于接收识别层中比对模块比对得到的模型图像与零件图像的相似性,设定相似判定阈值,应用相似性比对结果与相似判定阈值比对,判定零件图像来源零件是否合格,分割模块用于监测判定模块中判定结果,在判定结果为否时,对模型图像与零件图像进行分割,并向识别层反馈,嗅探模块用于接收分割模块向识别层反馈分割的模型图像与零件图像后,识别层输出数据,基于识别层输出数据嗅探零件上存在误差位置;
30、其中,相似性比对结果处于相似判定阈值内,则判定相似性比对结果来源零件图像对应零件为合格,反之,为不合格,所述分割模块对模型图像与零件图像进行分割处理时,模型图像与零件图像各自分割得到的子图像数量相同、且各子图像大小相等,所述模型图像与零件图像中零件所占图像比例相同,所述分割模块对模型图像与零件图像进行分割时,分割数量表示为x×x,x为大于1的整数,零件三维模型的复杂程度越高,则x的取值越大,反之,则x的取值越小。
31、更进一步地,所述分割模块向识别层反馈分割的模型图像与零件图像后,识别层同步应用比对模块比对各来源模型图像的子图像与来源零件图像的子图像的相似性,进一步将相似性比对结果向判定层中判定模块发送,应用判定模块判定各来源零件图像的子图像对应的零件结构是否合格,再通过嗅探模块对判定结果为不合格的对应来源零件图像的子图像进行获取,系统端用户基于嗅探模块获取的子图像,在子图像来源零件图像中确认子图像对应零件上区域,并根据零件上区域辨识多轴机床上对该区域进行加工的加工工位,辨识到的加工工位即多轴机床上存在误差的加工工位。
32、更进一步地,所述选择模块通过介质电性连接有识别模块、采集模块及比对模块,所述选择模块通过局域网络交互连接有生成模块,所述生成模块通过介质电性连接有上传模块及构建模块,所述比对模块通过局域网络交互连接有判定模块,所述判定模块通过介质电性连接有分割模型及嗅探模块,所述构建层、识别层及判定层通过局域网络与控制终端交互连接,控制终端基于局域网络传输控制命令向构建层、识别层或判定层反馈。
33、采用本发明提供的技术方案,与已知的公有技术相比,具有如下有益效果:
34、本发明提供一种基于cnc的多轴机床加工用控制系统,该系统在运行过程中,通过上传零件规格参数的方式构建零件三维模型,并以指定的模型图像采集逻辑,采集大量的模型图像汇聚成为对照数据集以用作数据参考,进而在多轴机床输出制得的零件时,进一步对零件图像进行采集,最终以采集的零件图像与模型图像比对,对零件进行合格判定,并在判定结果为不合格时,还能够以不合格的判定来源零件图像作为数据支持,反向嗅探零件上不合格位置,进而为系统端用户提供数据参考,对多轴机床上零件上不合格位置来源工位进行获取,从而以此为多轴机床带来误差、故障预见效果,确保多轴机床产出零件合格率得到稳定的保障,借此一定程度的节约了多轴机床生产工件品控流程所耗费的成本。
- 还没有人留言评论。精彩留言会获得点赞!