沉管管节台车滚装上驳施工系统、设计方法和控制方法与流程
本发明涉及沉管管节台车滚装上驳安全控制施工,特别是沉管管节台车滚装上驳施工系统、设计方法和控制方法。
背景技术:
1、目前,大型构件常采用气囊滚装上驳,如沉箱。自动化、信息化程度较低,上驳效率较慢,施工安全风险较大。深中通道等项目开始采用液压台车系统移运长大型沉管管节,大大提高施工工效、降低施工安全风险。
2、沉管管节对变形适应能力较差,液压台车系统可采用油压控制,具备变形自适应能力,但受千斤顶行程制约,且变形自适应快慢受油管回油快慢制约。相比于气囊,液压台车系统为刚性支撑,变形控制不及时,容易造成沉管管节破坏。因而,采用液压台车系统进行沉管管节上驳施工,需要对沉管管节安全进行实时监控,并能对工艺调控需求进行快速决策,目前缺乏相应的施工安全控制方法。
3、采用液压台车系统进行沉管管节上驳施工,可大大提高上驳效率、降低施工安全风险,但对施工控制提出了高精度、实时反馈、快速决策的高要求。传统施工控制方法主要体现在对结构主体自身的安全控制,不能满足沉管管节台车滚装上驳的控制要求。
技术实现思路
1、本发明的目的在于:针对现有技术在沉管管节上驳工艺中,控制沉管管节上驳安全的方法主要是对结构主体的安全控制,无法对沉管管节上驳过程进行控制,进而存在不能满足沉管管节台车滚装上驳的控制要求的问题,提供沉管管节台车滚装上驳施工系统、设计方法和控制方法。
2、为了实现上述目的,本发明采用的技术方案为:
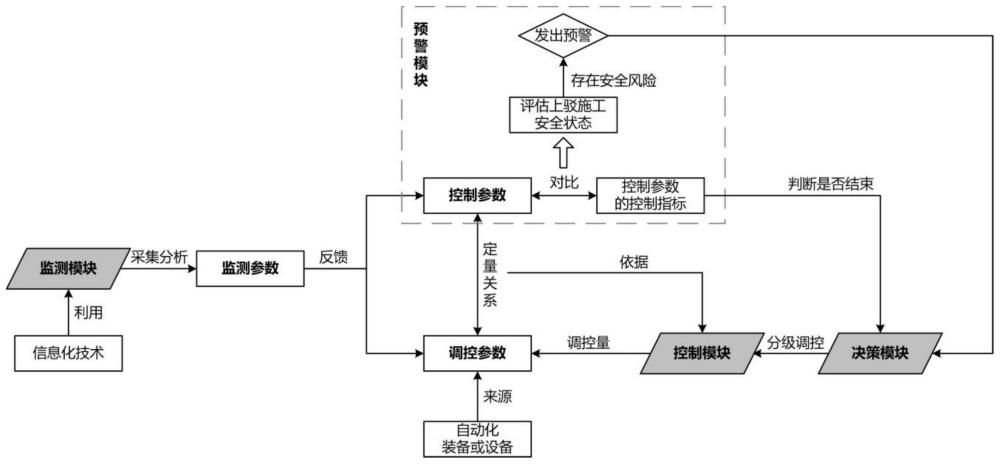
3、一种沉管管节台车滚装上驳施工系统,利用自动化装备或设备的控制系统实现对沉管管节上驳施工安全的控制,包括监测模块、预警模块、决策模块和控制模块;
4、所述监测模块利用信息化技术对所需监测参数进行实时采集分析,监测参数为能够反馈控制参数与调控参数的参数,调控参数为来源于自动化装备或设备的参数;
5、所述预警模块用于对比分析所需控制参数的控制指标与监测参数的实时监测结果,并判定沉管管节上驳施工是否存在安全风险,当沉管管节上驳施工存在安全风险时发出预警;
6、所述控制模块依据控制参数与调控参数的定量关系对调控参数进行实时调控,所述控制模块包括自动化装备或设备的半潜驳的调载控制系统、台车系统的独立控制系统和船上支墩的液压支撑结构控制系统,所述调载控制系统能够接受决策模块的调控指令实时调控各船舱压载水,所述独立控制系统接受决策模块的调控指令实时调控台车系统的千斤顶行程与油压,所述液压支撑结构控制系统接受决策模块的调控指令实时调控液压支撑行程;
7、所述决策模块根据所述预警模块的判断结果利用所述控制模块实现调控,使得监测参数的实时监测结果满足所需控制参数的控制指标的相关需求。
8、本发明所述沉管管节台车滚装上驳施工系统,主要涉及对沉管管节台车滚装上驳施工过程的监控、预警、决策和控制,依托监测模块对沉管管节台车滚装上驳施工过程中的监测参数进行信息化监测获得监测数据,由预警模块对比分析所需控制参数的控制指标与监测参数的实时监测结果,判定沉管管节驳运是否存在安全风险;决策模块根据所述预警模块的判断结果利用所述控制模块实现调控,使得监测参数的实时监测结果满足所需控制参数的控制指标的相关需求;其可实现对沉管管节台车滚装上驳施工安全进行实时评估,并指导半潜驳的调载控制系统、台车系统的独立控制系统和船上支墩的液压支撑结构控制系统的实时调控,实时控制沉管管节台车滚装上驳施工安全,控制精度更高,大大提高沉管管节上驳效率的同时,保障了施工安全。
9、优选的,所需控制参数包括结构控制参数和工艺控制参数,监测参数包括结构监测参数、工艺监测参数、调控监测参数和环境监测参数,调控参数包括环境控制参数、事先调控参数和实时调控参数;
10、结构控制参数包括支撑面不同步位移和沉管管节的混凝土应力,工艺控制参数包括半潜驳的船尾甲板面与码头面高差、半潜驳的船舶变形量和半潜驳的船舶姿态;
11、结构监测参数包括管节监测点位移和管节监测点应力,工艺监测参数包括半潜驳监测点位移和半潜驳监测点倾角,调控监测参数包括台车千斤顶油压、船舱压载水水位和船上支墩实时高度,环境监测参数包括风速、风向、波高、波长、波浪周期、流速和流向;
12、环境控制参数包括施工作业船口,事先调控参数包括半潜驳调载能力、半潜驳抗变形能力、千斤顶行程可调量、船上支墩性能曲线、船上支墩高度可调量,实时调控参数包括半潜驳调载方案、千斤顶油压和船上支墩实时高度。
13、环境监测参数的监测主要是判断当前环境是否满足相应的施工安全,用于判断是否满足作业条件。
14、沉管管节以多支撑形式通过台车系统或船上支墩放置在地面或半潜驳上,地面不平整、半潜驳变形与半潜驳的姿态变形等通过影响多支撑处位移对沉管管节受力特性产生影响,因而控制沉管管节结构安全核心在于控制多支撑处位移。沉管管节支撑处高程相对施工前初始状态高程差值称为支撑位移,所有支撑位移形成的面称为支撑面,以支撑位移拟合一个平面,尽量保证最多支撑点位于平面内,该平面称为支撑平面,存在支撑点不在支撑平面时,表明支撑面产生不同步位移,该支撑点与支撑平面的距离称为支撑面不同步位移,通过对管节监测点位移、管节监测点应力半潜驳监测点位移、半潜驳监测点倾角、台车千斤顶油压、船舱压载水水位和船上支墩实时高度进行监测,能够与沉管管节的支撑面不同步位移、沉管管节的混凝土应力、半潜驳的船尾甲板面与码头面高差、半潜驳的船舶变形量和半潜驳的船舶姿态,使得预警模块能够快速判定沉管管节驳运是否存在安全风险,且决策模块基于所述预警模块的判断结果以及监测数据快速决策如何通过控制模块实现调控,使得监测参数的实时监测结果满足所需控制参数的控制指标的相关需求。
15、优选的,监测模块包括在沉管管节上均匀满布的第一竖向位移监测点、在沉管管节上布置的应力监测点、在半潜驳布设的第二竖向位移监测点、在半潜驳布设的倾角监测点、台车系统的千斤顶自动化采集设备、船舱压载水水位自动化采集设备以及船上支墩高度自动化采集设备。
16、沉管管节上均匀满布的第一竖向位移监测点用于判断沉管管节的支撑面不同步位移;在沉管管节上布置的应力监测点用于获取沉管管节的混凝土应力状况;在半潜驳布设的第二竖向位移监测点以及在半潜驳布设的倾角监测点,用于获取半潜驳的竖向位移和倾角,进而获取半潜驳的船尾甲板面与码头面高差、半潜驳的船舶变形量和半潜驳的船舶姿态;台车系统的千斤顶自动化采集设备用于获取台车千斤顶油压,进而能够判断台车千斤顶支撑高度和台车千斤顶的可调控量;船舱压载水水位自动化采集设备用于获取船舱压载水水位,能够用于判断半潜驳的竖向位移和倾角的可调控量,即获得半潜驳的船舶姿态的可调控量,进而调整半潜驳的船尾甲板面与码头面高差、半潜驳的船舶变形量;船上支墩高度自动化采集设备能够获取船上支墩高度,进而获取船上支墩高度的可调控量,用于调整沉管管节的支撑面不同步位移。
17、优选的,沉管管节上的第一竖向位移监测点临近沉管管节底板布设;
18、沉管管节上的应力监测点布置在沉管管节的跨中断面、1/4跨与3/4跨断面和管端断面上;
19、半潜驳上的第二竖向位移监测点和倾角监测点设于半潜驳甲板面上。
20、采用上述布置方式,布置方便,且能够更加直观的获取相应的参数,且获取的相应参数能够更好的反馈沉管管节上驳的受力变形状态,便于对沉管管节的安全进行调控。
21、优选的,台车系统包含若干阵列排布的台车,台车具有千斤顶,所有台车的千斤顶分成至少三组,每组台车的千斤顶的油压连通,不同组的台车的千斤顶的油压断开。
22、分区间油压差异会影响沉管管节变形与受力,对台车系统千斤顶分区油压差进行实时控制,对沉管管节变形与受力控制效果更好。
23、优选的,所有台车的千斤顶分成三组,第一组位于所有台车形成阵列的后半部分,第二组和第三组位于所有台车形成阵列的前半部分并左右对称,使得开始上驳过程能够更好的控制沉管管节变形与受力。
24、一种沉管管节台车滚装上驳施工系统的设计方法,用于设计所述的沉管管节台车滚装上驳施工系统,包括以下设计步骤:
25、s1、根据半潜驳与沉管管节的刚度与受力模型获取两者变形差异量作为变形协调量;
26、s2、通过理论分析,考虑沉管管节上驳施工安全及质量控制要求,获取控制参数的控制指标、控制参数与调控参数的定量关系;
27、s3、通过理论分析,根据变形协调量、工艺需求和设备性能要求,明确半潜驳调载能力与半潜驳抗变形能力的选型需求、台车系统的千斤顶行程可调量的配置要求、船上支墩性能曲线与船上支墩高度可调量的设计要求;
28、s4、针对台车系统千斤顶配设油压独立控制系统,针对半潜驳配设调载控制系统,针对船上支墩系统配设高度调节控制系统,形成控制模块;
29、采用智能传感设备、自动化采集设备和无线传输技术形成基于物联网的监测模块;
30、并构建沉管管节台车上驳施工安全风险实时预警模块,当监测参数的实时监测结果大于或等于控制参数的控制指标时发出报警信号,并能自动进入决策模块;
31、并构建实时调控参数的分级调控决策机制,根据调控效率最大化原则,第一级调控千斤顶油压,调控能力取决于千斤顶行程可调量,第二级调控船舶调载方案,调控能力取决于船舶调载能力,第三级调控船上支墩高度,调控能力取决于船上支墩高度可调量,每一级达到最大调控能力进入下一级调控,直至监测参数的实时监测结果满足所需控制参数的控制指标的相关需求,且当预警模块发出报警信号时,能够通过决策模块发出调控指令并利用所述控制模块实现调控,并将调控结果与监测模块实时监测结果进行对比判定是否结束调控。
32、变形协调量是指半潜驳与沉管管节刚度与受力模型不同会引起两者变形差异,需要通过台车系统千斤顶行程或船上支墩高度进行调控,其是指上驳过程中最终的控制指标;工艺需求是指工艺规范中对能够调节的范围做了限定,这将影响设备性能的选择;而设备性能本身也将影响选择,如单一的台车系统千斤顶的可调控量或者船上支墩的支撑高度的可调控量无法做到过大。
33、采用上述沉管管节台车滚装上驳施工系统的设计方法,能够根据变形协调量考虑沉管管节上驳施工安全及质量控制要求,获取控制参数的控制指标、控制参数与调控参数的定量关系,能够根据变形协调量、工艺需求和设备性能要求明确半潜驳调载能力与半潜驳抗变形能力的选型需求、台车系统的千斤顶行程可调量的配置要求、船上支墩性能曲线与船上支墩高度可调量的设计要求,保证控制模块能够满足相应的调控需求;进而能够形成监测模块、预警模块、决策模块和控制模块为一体的沉管管节台车滚装上驳施工系统,满足对变形协调量的调控。
34、一种沉管管节台车滚装上驳施工的控制方法,采用所述的沉管管节台车滚装上驳施工系统;
35、在沉管管节台车滚装上驳施工的过程中:
36、预警模块实时对比分析所需控制参数的控制指标与监测参数的实时监测结果并判定沉管管节驳运是否存在安全风险,若预警模块判定沉管管节驳运存在安全风险,则发出预警信号并自动进入调控决策模块,决策模块根据所述预警模块的判断结果利用所述控制模块实现调控,使得监测参数的实时监测结果满足所需控制参数的控制指标的相关需求,然后解除驳运施工安全预警。
37、采用上述沉管管节台车滚装上驳施工的控制方法,可实现对沉管管节台车滚装上驳施工安全进行实时评估,并指导半潜驳的调载控制系统、台车系统的独立控制系统和船上支墩的液压支撑结构控制系统的实时调控,实时控制沉管管节台车滚装上驳施工安全,控制精度更高,大大提高沉管管节上驳效率的同时,保障了施工安全。
38、优选的,决策模块根据所述预警模块的判断结果利用所述控制模块实现调控包括以下控制步骤:
39、s01、进行第一级调控:根据监测模块监控获得台车系统的千斤顶行程和油压实测数据,根据千斤顶行程和油压实测数据得到千斤顶调控目标油压和行程来判断台车系统的千斤顶的行程可调控量,当台车系统的千斤顶行程可调控量大于0时,通过独立控制系统调控台车系统的千斤顶行程与油压;当台车系统的千斤顶行程可调控量等于0时,预警模块判断沉管管节驳运是否存在安全风险,如果判断沉管管节驳运不存在安全风险,则调控完成,解除驳运施工安全预警;如果判断沉管管节驳运存在安全风险,则进入下一级调控;
40、s02、进行第二级调控:根据监测模块监控获得半潜驳各压船水的实测数据,根据各压船水的实测数据得到压船水可调控量,当压船水可调控量大于0时,通过调载控制系统调控各船舱压载水;当压船水可调控量等于0时,预警模块判断沉管管节驳运是否存在安全风险,如果判断沉管管节驳运不存在安全风险,则调控完成,解除驳运施工安全预警;如果判断沉管管节驳运存在安全风险,则进入下一级调控;
41、s03、进行第三级调控:根据监测模块监控获得船上支墩的液压支撑结构控制系统的液压支撑行程实测数据,根据液压支撑行程实测数据获得液压支撑行程可调控量,通过液压支撑结构控制系统调节液压支撑行程实现调控,然后解除驳运施工安全预警。
42、在实际控制中,台车系统的千斤顶的调节难度、调载控制系统调控各船舱压载水的难度和液压支撑结构控制系统调节液压支撑行程实现调控的难度是依次增大的,即第一级调控的难度小于第二级调控难度,第二级调控难度小于第三级调控难度,通过先控制难度低的,再控制难度高的,操作更加简单,有利于提高上驳的效率和安全性。
43、优选的,在步骤s01-步骤s03中,当当前级调控已经满足沉管管节驳运安全且当前级调控的可调控量小于可调控量的50%时,则当前级调控结束条件为:监测参数的实测数据为控制参数控制指标的50%。
44、每一级调控是线性变化的,当前级调控已经满足沉管管节驳运安全且当前级调控的可调控量小于可调控量的50%时,将当前级调控结束条件为:监测参数的实测数据为控制参数控制指标的50%,能够避免后续频繁调控,减小操作难度。
45、综上所述,由于采用了上述技术方案,本发明的有益效果是:
46、1、本发明所述沉管管节台车滚装上驳施工系统,依托监测模块对沉管管节台车滚装上驳施工过程中的监测参数进行信息化监测获得监测数据,由预警模块对比分析所需控制参数的控制指标与监测参数的实时监测结果,判定沉管管节驳运是否存在安全风险;决策模块根据所述预警模块的判断结果利用所述控制模块实现调控,使得监测参数的实时监测结果满足所需控制参数的控制指标的相关需求;其可实现对沉管管节台车滚装上驳施工安全进行实时评估,并指导半潜驳的调载控制系统、台车系统的独立控制系统和船上支墩的液压支撑结构控制系统的实时调控,实时控制沉管管节台车滚装上驳施工安全,控制精度更高,大大提高沉管管节上驳效率的同时,保障了施工安全。
47、2、本发明所述沉管管节台车滚装上驳施工系统的设计方法,能够根据变形协调量考虑沉管管节上驳施工安全及质量控制要求,获取控制参数的控制指标、控制参数与调控参数的定量关系,能够根据变形协调量、工艺需求和设备性能要求明确半潜驳调载能力与半潜驳抗变形能力的选型需求、台车系统的千斤顶行程可调量的配置要求、船上支墩性能曲线与船上支墩高度可调量的设计要求,保证控制模块能够满足相应的调控需求;进而能够形成监测模块、预警模块、决策模块和控制模块为一体的沉管管节台车滚装上驳施工系统,满足对变形协调量的调控。
48、3、本发明所述沉管管节台车滚装上驳施工的控制方法,可实现对沉管管节台车滚装上驳施工安全进行实时评估,并指导半潜驳的调载控制系统、台车系统的独立控制系统和船上支墩的液压支撑结构控制系统的实时调控,实时控制沉管管节台车滚装上驳施工安全,控制精度更高,大大提高沉管管节上驳效率的同时,保障了施工安全。
- 还没有人留言评论。精彩留言会获得点赞!