一种AIMM-UKF-JPDA的车辆多目标跟踪的研究方法
本发明涉及车辆多目标跟踪,具体涉及到一种aimm-ukf-jpda的车辆多目标跟踪的研究方法。
背景技术:
1、多目标跟踪是指在事先不知道目标数量的情况下,对视频中的行人、汽车、动物等多个目标进行检测并赋予id进行轨迹跟踪。不同的目标拥有不同的id,以便实现后续的轨迹预测、精准查找等工作。多目标跟踪主要包括目标检测、数据关联和状态估计三个阶段。首先通过基于深度学习的目标检测模型(例如yolo、faster r-cnn、pointpillar)检测图像或激光雷达中的目标物体。然后对不同帧之间的目标进行数据关联,这是多目标跟踪中的核心问题,主要确定哪些检测框对应于同一目标,从而形成目标的轨迹。常用的数据关联算法有最近邻nn、联合概率数据关联jpda、交并比iou等方法。联合概率数据关联jpda算法数据关联效果比较好,但是算法比较复杂,耗费时间长,最近邻nn和交兵比iou数据关联算法比较简单,运行速度比较快,但是数据关联效果一般。而且通过数据关联确定跟踪目标所对应的检测目标时,接着需要对跟踪目标的状态进行估计,常见的是借助卡尔曼滤波对车辆状态进行估计,这种方法存在一定的局限性,它仅考虑了有限的目标运动模型。实际上在道路上行驶的车辆往往会出现多种运动情况,如加速、减速和转弯等,采用单一运动模型的方法可能不适用于复杂的运动模式,从而导致所估计的目标状态不够精确。交互式多模型算法是一种处理复杂运动模型的滤波算法,该算法的核心思想在于同时使用多个不同的运动模型来跟踪目标,以提高目标跟踪的性能。但是标准的交互式多模型算法由于马尔可夫矩阵是固定不变的,不能自适应与目标运动模式进行匹配,导致匹配模型概率不能有效增大,影响了目标跟踪的精度。
技术实现思路
1、本发明涉及到车辆的多目标跟踪技术领域,在于提供一种aimm-ukf-jpda的车辆多目标跟踪的研究方法,用于提高车辆多目标跟踪的准确度;为实现上述目的,本发明提供一种aimm-ukf-jpda的车辆多目标跟踪的研究方法,包括下列步骤:
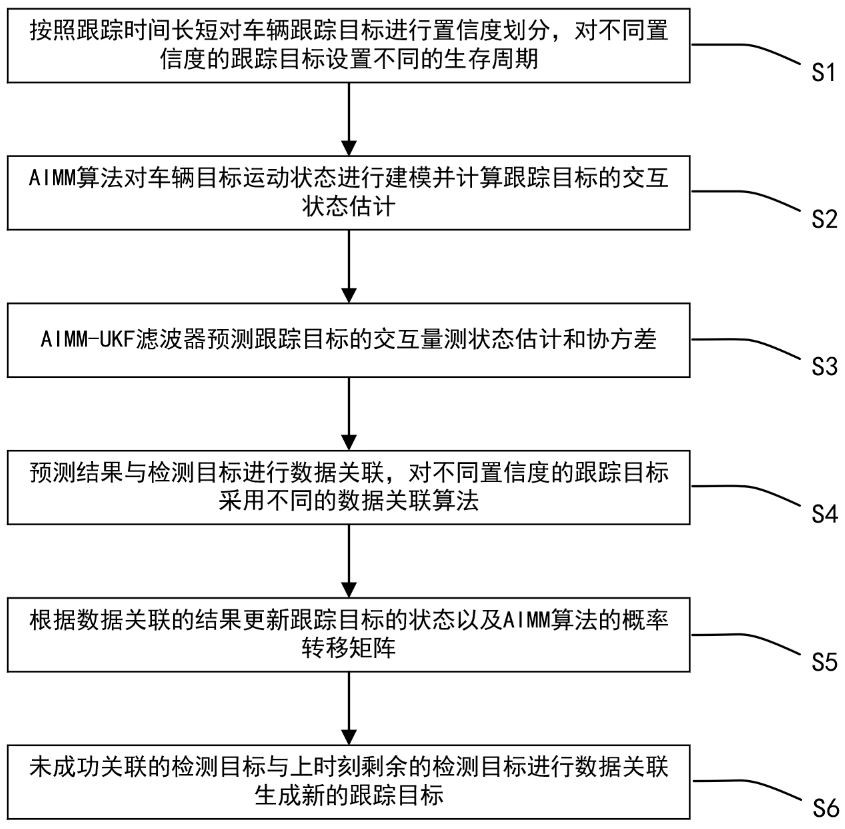
2、步骤1:按照跟踪时间长短对车辆跟踪目标进行置信度划分,对不同置信度的跟踪目标设置不同的生存周期;
3、步骤2:aimm算法对车辆目标运动状态进行建模并计算跟踪目标的交互状态估计;
4、步骤3:aimm-ukf滤波器预测跟踪目标的交互量测状态估计和协方差;
5、步骤4:预测结果与检测目标进行数据关联,对不同置信度的跟踪目标采用不同的数据关联算法;
6、步骤5:根据数据关联的结果更新跟踪目标的状态以及aimm算法的概率转移矩阵;
7、步骤6:未成功关联的检测目标与上时刻剩余的检测目标进行数据关联生成新的跟踪目标。
8、可选的,记录每个跟踪目标的跟踪时间,具体是在每帧点云数据中,该跟踪目标能够关联到对应的检测,记录关联帧出现的次数,如果出现未关联到帧则对记录的次数进行减1,将记录的次数作为跟踪时间;根据跟踪时间是否大于一定阈值将跟踪目标分为高置信度和低置信度跟踪目标;对于不同跟踪目标设置不同的生存周期,当连续数帧都没关联的检测,且帧数大于生存周期时,将该跟踪目标标记为待消除。
9、可选的,通过改进的aimm算法对车辆目标运动状态进行建模,考虑到车辆目标运动特点,选择匀速直线模型(cv)、匀加速模型(ca)和匀速转弯率和速度模型(ctrv)来模拟车辆在实际驾驶中的运动情况,各个模型初始概率为1/3,根据模型的状态估计和模型概率计算跟踪目标的交互状态估计,计算公式如:
10、
11、
12、
13、
14、其中代表输入交互后目标处于j模型的概率,为表示概率转移矩阵中模型i转移到模型j的概率,为交互前i模型的概率;代表假设目标交互后处于j模型的前提下,目标由i模型转换的概率;和代表不同模型的状态估计和协方差;和代表不同模型下ukf滤波器输入的交互状态估计和交互协方差。
15、可选的,通过aimm-ukf滤波器对跟踪目标状态进行预测,具体是通过ukf滤波器预测出不同运动模型的下一时刻的量测状态估计和协方差,然后将模型概率作为权重加权计算交互量测状态估计和协方差,计算公式如
16、
17、
18、
19、
20、其中代表k-1时刻j模型的第i个sigma点,代表第i个sigma点权重,q为过程噪声,和分别代表k时刻预测的状态估计和协方差;代表k时刻预测状态的sigma点,r为测量噪声,和分别代表k时刻预测的量测状态估计和协方差;和分别代表预测k时刻的交互量测状态估计和协方差。
21、可选的,将预测结果与检测目标进行数据关联,高置信度跟踪目标采用jpda数据关联算法,低置信度跟踪目标采用nn数据关联算法,数据关联阶段具体步骤包括以下:
22、步骤4.1:判断所有检测目标是否落入高置信度跟踪目标的跟踪门内,对落入跟踪门的检测目标构建关联矩阵1,没有落入的检测目标标记为待关联检测目标1;
23、步骤4.2:对关联矩阵1进行聚类,将有相互连接关系的跟踪和检测聚为一类,将整个关联矩阵拆分成多个子关联矩阵,每个子关联矩阵代表部分跟踪目标和检测目标的关联情况;
24、步骤4.3:对每个子关联矩阵通过jpda算法计算出每个跟踪目标和有检测目标关联的后验概率,根据概率对检测目标进行加权求和作为测量来更新跟踪目标的最优状态估计;
25、步骤4.4:计算更新后的跟踪目标和所有检测目标的距离并构建带有距离权重的关联矩阵,通过匈牙利算法求解关联矩阵距离和最小的匹配方案,在匹配方案中将距离大于一定阈值的检测目标和跟踪目标分别标记为待关联检测目标1和未关联跟踪目标1;
26、步骤4.5:通过nn算法对低置信度跟踪目标与待关联检测目标1进行数据关联,将关联方案中距离大于阈值的检测目标和跟踪目标标记为到待关联检测目标2和未关联跟踪目标1中。
27、可选的,步骤5的执行过程,包括下列步骤:
28、根据数据关联的结果更新跟踪目标的状态以及aimm算法的概率转移矩阵,方法如下,
29、步骤5.1:计算步骤4中得到的未关联跟踪目标1的跟踪时间,对大于生存周期的跟踪目标进行删除,小于生存周期的跟踪目标将先验状态估计作为当前时刻的最优状态估计;
30、步骤5.2:步骤4中得到跟踪目标和检测目标关联情况,将对应的检测目标作为真实的量测数据,分别通过极大似然函数和ukf滤波器更新跟踪目标子模型的概率以及最优状态估计,至于高置信度跟踪目标最优状态估计已经通过jpda算法更新;
31、步骤5.3:以更新后的模型概率为权重,对跟踪目标的各个模型的最优状态估计进行加权求和得到其最优交互状态估计;
32、步骤5.4:根据相邻时刻模型概率的变化率作为修正参数更新跟踪目标的概率转移矩阵,修正方法如下:
33、假设代表k时刻模型j的概率,代表k-1时刻模型j的概率,通过取指数的方式引入来描述模型概率变化情况,公式如下:
34、
35、对概率转移矩阵中非主对角线元素采用子模型之间概率变化率之比与其乘积进行更新修正,而主对角线元素直接与概率变化率乘积进行修正,对修正后的参数进行归一化,公式如下:
36、
37、
38、
39、其中代表k-1时刻概率转移矩阵第i行第j列元素,表示k-1时刻修正后的矩阵第i行第j列元素,表示归一化后的矩阵第i行第j列元素;
40、考虑到主对角线占优原则,判断归一化后的概率转移矩阵主对角线元素是否小于阈值th(取值在0.8为宜),对小于阈值th的各行进行二次修正,公式如下:
41、
42、
43、步骤5.5:根据检测目标的检测框来更新有关联的跟踪目标的跟踪框信息,没有关联但跟踪时间小于生存周期的目标则延续上时刻的跟踪框信息。
44、可选的,将步骤4得到的待关联检测目标2与上时刻剩余的检测目标进行数据关联,计算两者之间的距离和iou交并比,根据距离构建关联度矩阵,通过匈牙利算法计算距离和最小的匹配方案,筛选出前后两时刻距离和iou满足一定阈值的的检测目标来初始化新的跟踪目标,将待关联检测目标2中不满足阈值的检测目标标记为当前时刻剩余的检测目标。
45、本发明涉及到车辆的多目标跟踪技术领域,具体涉及一种aimm-ukf-jpda的车辆多目标跟踪的研究方法。首先按照跟踪时间长短对车辆跟踪目标进行置信度划分,对不同置信度的跟踪目标设置不同的生存周期;通过改进的aimm算法对车辆目标运动状态进行建模并计算跟踪目标的交互状态估计;接着通过aimm-ukf滤波器预测跟踪目标的交互量测状态估计和协方差;然后将预测结果与检测目标进行数据关联,对不同置信度跟踪目标采用不同数据关联算法;根据数据关联的结果更新跟踪目标的状态以及aimm算法的概率转移矩阵;最后将未成功关联的检测目标与上时刻剩余的检测目标进行数据关联生成新的跟踪目标。通过实验仿真,本发明提高了车辆多目标跟踪的准确度。
- 还没有人留言评论。精彩留言会获得点赞!