一种基于标定块的点云拼接方法、装置、设备和介质与流程
本发明涉及三维点云测量,具体为一种基于标定块的点云拼接方法、装置、设备和介质。
背景技术:
1、随着科学技术的发展和社会市场需求的不断增加,越来越多的非接触式三维测量需求逐年递增,其主要体现在汽车电子行业、新能源行业、3c电子行业、机械零部件加工制造行业、医药器械行业、液晶面板生产加工行业、半导体行业等;针对这些行业大多数的测量和检测需求,二维图像已经逐渐不能满足的情况下,三维测量逐渐走进了大家的视野,比如:针对零部件的高度检测、体积测量、平面度检测、平行度、三维凹坑以及凸起缺陷检测、段差检测、胶路宽度检测等。
2、现有的线激光点云采集设备,扫描轮廓线点数以1000~5000个居多,其单条轮廓线中点与点的距离在为轮廓线分辨率,其值越小精度越高,其值越大,精度越差,一般而言,轮廓线宽度较小的设备,价格相对较低,轮廓线宽度较大的设备,价格较昂贵。在实际的需求当中,大多数的设备较大,如果采用轮廓线宽度较大的线激光会导致误差较大,若采用轮廓线宽度较小的设备,精度较高,但视野无法满足整个零部件,所以,多点云拼接就显得愈加重要。1992年bes l等研究者提出了一种迭代最近邻法icp,该方法是计算点到点之间的变换关系实现的拼接,通过运用faugeras和hebert提出的方法计算最近点集,依赖迭代计算,直至残差平方和保持不变,结束迭代。近年来,虽然icp出现了各种变种,如点到点的、点到面的、面到面的等,但i cp算法迭代进行点云拼接,需要一个较好的初始位置,待拼接的两幅点云要么是相等的数量关系,要么是一个是另一个的子集,且极易陷入局部最优解,而且基于迭代循环求解的方式,非常耗时。
3、为此,我们提出一种基于标定块的点云拼接方法、装置、设备和介质,用以解决上述技术问题。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种基于标定块的点云拼接方法、装置、设备和介质,具备提高点云拼接的精度和效率等优点,解决了上述技术问题。
3、(二)技术方案
4、为实现上述提高点云拼接的精度和效率目的,本发明提供如下技术方案:第一方面,一种基于标定块的点云拼接方法,包括以下步骤:
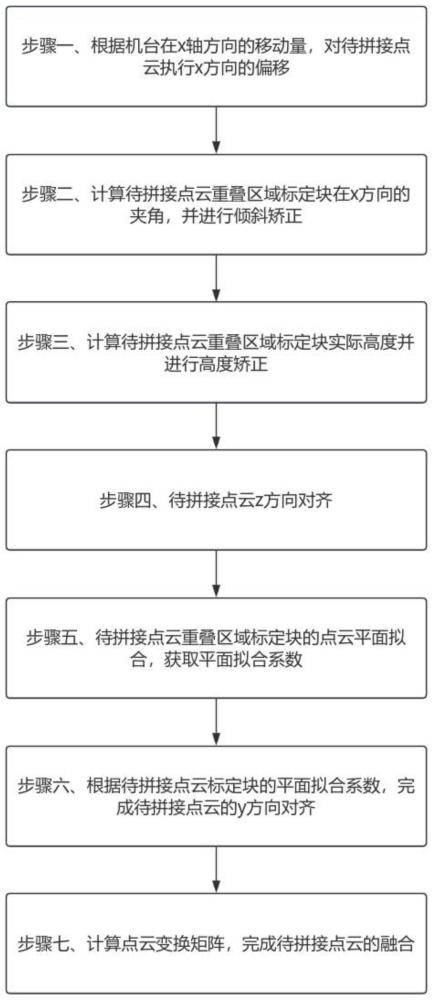
5、步骤一、根据机台在x轴方向的移动量,对待拼接点云执行x方向的偏移;
6、步骤二、计算待拼接点云重叠区域标定块在x方向的夹角,并进行倾斜矫正;
7、步骤三、计算待拼接点云重叠区域标定块实际高度并进行高度矫正;
8、步骤四、待拼接点云z方向对齐;
9、步骤五、待拼接点云重叠区域标定块的点云平面拟合,获取平面拟合系数;
10、步骤六、根据待拼接点云标定块的平面拟合系数,完成待拼接点云的y方向对齐;
11、步骤七、计算点云变换矩阵,完成待拼接点云的融合。
12、优选的,所述步骤一包括以下步骤:
13、a1、根据机台在x轴方向的移动量,计算待拼接的两幅点云拼接之后的图像大小;
14、a2、对待拼接点云中的其中一个点云进行x坐标轴偏移,偏移量为机台的x轴的移动量;
15、a3、当两幅待拼接的点云的扫描反向相反时,对其中一个副点云进行反向矫正,然后再进行x坐标的偏移。
16、优选的,所述步骤二中包括以下步骤:
17、b1、基于完成机台移动量偏移的点云,分别对待拼接的点云重叠区域的标定块点云进行分割;
18、b2、将线激光轮廓线分别打到待拼接点云标定块同一个平面的上方,基于标定块上的轮廓线,采用最小二乘法拟合直线,通过迭代法计算均方根误差,提高直线拟合的精度,分别计算获取待拼接点云在x轴方向的倾斜角,当角度超出[-5°,5°]时,检查线激光的安装是否存在较大误差,分别计算求得待拼接点云的倾斜角度之后,完成倾斜矫正。
19、优选的,所述步骤三包括以下步骤:
20、c1、基于待拼接点云已经完成倾斜矫正,移动线激光的位置,分别将线激光打在标定块的不同平面上,分别获取轮廓线中标定块的高度;
21、c2、根据当前待拼接点云的标定块高度,和实际标定块的高度,作差分别求取当前待拼接点云的高度差,完成高度矫正;
22、c3、在做完倾斜矫正之后,进行测量当前标定块的高度差,高度的计算基于轮廓线不同平面的两个检测范围,分别针对这两个检测范围进行轮廓线数据的处理,设定过滤噪点阈值,过滤掉影响结果的噪点。
23、优选的,所述步骤四包括以下步骤:
24、d1、对完成倾斜矫正和高度矫正的点云,确定z方向对齐的检测范围;
25、d2、分别获取检测范围内的点云数据,设置阈值,过滤由于采集成像产生的噪点,分别计算待拼接点云在当前设置的检测范围内的z值,根据待拼接点云计算出来的z值,得到待拼接点云z值的差值,完成z方向的对齐。
26、优选的,所述步骤五中分别对待拼接点云设置平面拟合的范围,针对待拼接点云的检测范围进行点云平面拟合,拟合方法采用加权的最小二乘法。
27、优选的,所述平面拟合系数的获取包括分别对待拼接的点云设置两个检测框r1、r2,分别用r1、r2内的p1、p2点云计算待拼接的两幅点云重叠区域标定块上顶部的平面方程,得到p1、p2点云的平面方程:
28、plane1:a0x+b0y+c0z+d0=0
29、plane2:a1x+b1y+c1z+d1=0
30、其中,(a0,b0,c0)为p1点云的拟合平面的法向量,(a1,b1,c1)为p2点云的拟合平面的法向量。
31、优选的,所述步骤六中包括以下步骤:
32、e1、分别确定待拼接点云重叠区域点云中y对齐的区域,区域的宽度和标定块大小保持一致,区域的高度为标定块倾斜面的二分之一,两个区域的大小保持一致;
33、e2、针对待拼接点云重叠区域求取的平面方程plane1、平面方程plane2、对齐区域1、对齐区域2,分别计算点到平面的距离。
34、e3、将对齐区域1和对齐区域2分别求得的每一条轮廓线中点到平面距离存入内存1和内存2,然后设置对齐轮廓线数量的阈值n,对齐的次数设置为k,误差统计为m;计算步骤如下:
35、e3.1、正向对齐统计:将内存1中第一条轮廓线点到平面的距离和内存2中第一条轮廓线点到平面距离差值记为m0、将内存1中第二条轮廓线点到平面的距离和内存2中第二条轮廓线点到平面距离差值记为m1、将内存1中第三条轮廓线点到平面的距离和内存2中第三条轮廓线点到平面距离差值记为m2;直到完成n次统计,将m0=m0+m1+m2+....mn,n次计算视为第一次正向y对齐的结果;第二次正向y对齐的方式为:内存1第一条轮廓线对齐内存2第二条轮廓线、内存1第二条轮廓线对齐内存2第三条轮廓线,依次类推,操作n次;总共进行k次正向对齐;
36、e3.2、反向对齐统计:和正向对齐统计相同,将对齐方式反向操作,将内存2第一条轮廓线对齐内存1第二条轮廓线,内存2第二条轮廓线对齐内存1第三条轮廓线,以此类推,依次操作n次为一个对齐误差;
37、e3.3正向和反向对齐完成之后,总共有2k个对齐误差,对2k次对齐误差数据进行排序,对齐误差最小的对齐方式是最佳的对齐方式;
38、e4、y方向的对齐过程中,产品表面的特征存在高低差,线激光产生无效点云,当内存1和内存2中的当前点到平面的距离都为有效值时进行统计,否则,该点的对齐不能参与统计;
39、正向统计内存1中第i条轮廓线和内存2中第i条轮廓线点到平面距离的差值、统计内存1中第i条轮廓线和内存2中第i+1条轮廓线点到平面距离的差值m0、统计内存1中第i条轮廓线和内存2中第i+2条轮廓线点到平面距离的差值,以此类推,统计内存1中第i条轮廓线和内存2中第i+n条轮廓线点到平面距离的差值,i+n=k,反向统计与正向统计一致。
40、优选的,所述e2步骤中的距离公式为:
41、
42、点云p1和p2中每一个点云的距离可以表示为:
43、
44、其中,d为点云p1和p2到平面方程plane1、plane2的距离。
45、优选的,所述步骤七中包括以下步骤:
46、f1、基于步骤一至步骤六的操作,获得最终的点云拼接变换矩阵,将此矩阵作用于其中一个点云数据,得到变换之后的点云数据,并设定边缘阈值,所述边缘阈值为100,进行点云融合操作;
47、f2、根据待拼接点云1和待拼接点云2的变换点云的重叠区域进行点云融合,当待拼接点云1和待拼接点云变换点云都为有效点云时,该点为有效点云,点云的z值取两幅点云z值的均值,若其中任意一副点云为无效数据时,该点为无效点云,针对重叠区域之外的数据分别取两幅点云对应的点填充。
48、f3、当两幅点云融合时,对重叠的边缘地方进行平滑,采用尺寸为5*5的滤波核进行重叠边缘的高度值进行均值滤波,用于消除重叠边缘高低不平的情况。
49、第二方面,本发明提供了一种基于标定块的点云拼接装置,包括:
50、执行模块,用于对待拼接点云执行x方向的偏移;
51、第一计算模块,用于计算待拼接点云重叠区域标定块在x方向的夹角并进行倾斜矫正;
52、第二计算模块,用于计算待拼接点云重叠区域标定块高度和标定块的实际高度并完成高度矫正;
53、第一对齐模块,用于待拼接点云z方向对齐;
54、平面拟合模块,用于待拼接点云重叠区域标定块的点云平面拟合,获取平面拟合系数;
55、第二拼接模块,用于完成待拼接点云的y方向对齐;
56、第三计算模块,用于计算点云变换矩阵,完成待拼接点云的融合。
57、第三方面,本发明提供了一种电子设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述任意一项所述的基于标定块的点云拼接方法。
58、第四方面,本发明提供了一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述任意一项所述的基于标定块的点云拼接方法
59、与现有技术相比,本发明提供了一种基于标定块的点云拼接方法、装置、设备和介质,具备以下有益效果:
60、本发明在三维点云拼接测量领域,不需要依赖像i cp算法的方式进行迭代运算,也不需要分割完全一样的两幅待配准点云以及良好的初始位置,大大降低了拼接的误差,提高了拼接的精度和效率。
- 还没有人留言评论。精彩留言会获得点赞!