基于群体智能搜索的无人机平台与载荷一体化设计方法
本发明属于无人机任务规划,涉及一种无人机平台与载荷的一体化设计方法,尤其涉及一种基于群体智能搜索算法的无人机平台与载荷一体化设计方法,该方法通过建立集群搜索任务规划算法框架,结合改进顺次聚类算法、蚁群算法、粒子群优化算法和乌鸦搜索优化算法等多算法联合优化策略,实现对无人机数量的科学决策,以及在二维和三维层面上的最优任务调度和指标匹配。
背景技术:
1、无人机集群(unmanned aerial vehicle, uav, cluster)是指由多个无人机组成的协同作业系统,通过先进的通讯和算法技术实现,实现对多架无人机的集中控制并协同工作完成任务。无人机集群因其数量多、规模大、群体弹性等优势,在城市物流、海洋监测、边境安防、区域搜救等领域具有广阔的应用前景。特别是针对一些时效要求强、目标数量多的区域搜索任务,可派遣大量低成本无人机组成集群至任务区域,发挥数量优势,有效覆盖任务区域,快速完成任务。然而,尽管无人机集群具有上述优势,它们在实际操作中仍面临一系列挑战。其中一个关键问题是任务规划的复杂性,特别是在面对任务时效要求强、目标数量多的情况下,这不仅涉及到每个无人机的路径规划,还包括整个集群的优化调度和管理,涉及到无人机数量的确定、航线的规划、平台-载荷指标的匹配等多个方面。现有的任务规划方法往往无法充分利用集群的潜能,因而如何进行任务规划是一个值得研究的问题。
2、针对无人机平台性能和光电载荷(optical-electronic payload)指标性能的论证和匹配问题,现有技术通常都是将其简化处理,不考虑载荷的指标和与任务的匹配能力。从任务规划到无人机设计,都将载荷视为配件进行选装,未充分考虑其与任务的匹配性,难以实现基于集群任务的最优指标,无法充分利用集群的潜能。针对大规模集群任务,只有将载荷指标能力与任务、无人机平台综合研究,才更有利于发挥集群效能。目前,对于光电载荷与无人机性能、任务要求进行综合论证的研究较少,一般是基于优化的思想,对载荷能力-任务要求进行建模,求解时效、能耗等目标下的最优指标。这些工作对无人机集群任务规划问题做了积极的研究,取得了丰硕的成果。
3、但是,无人机任务规划问题仍有一些值得继续研究的点。在面对强时效、多任务目标时,大多数研究都是基于既定数量的无人机进行研究,然而,无人机数量本身,就是一个值得研究的问题。面对数量众多的目标,派遣多少架无人机去,每架无人机遵循怎样的目标航线,并不是一个简单的问题,过多或过少的无人机都会影响任务完成质量和效率。此外,在二维层面,进行最优任务调度也不足以满足实际需求。在二维基础上,考虑无人机性能和光电载荷性能,将问题提升至三维,分析无人机平台和光电载荷性能指标对任务完成能力的影响,给出最优的指标分析结果,是一个更加符合实际的问题。因此,为高效利用无人机集群,如何根据任务要求和目标数量,确定无人机集群的规模、航线和平台-载荷指标的匹配等,这些问题的深入研究和解决是提高无人机集群应用效率和效果的关键所在,也是亟待解决的技术问题。
技术实现思路
1、(一)发明目的
2、针对现有技术的上述缺陷和不足,为解决如何根据任务要求和目标数量,确定无人机集群的规模、航线和平台-载荷指标的匹配等问题,本发明旨在提供一种基于群体智能搜索的无人机平台与载荷一体化设计方法,通过建立集群搜索任务规划算法框架,并将改进顺次聚类算法、蚁群算法、粒子群优化算法和乌鸦搜索优化算法等联合使用,实现无人机集群在二维和三维空间中的最优任务调度和指标匹配。此方法能够有效提升任务规划的时效性和精确性,同时实现无人机平台与载荷性能指标的最优匹配,增强了无人机集群在执行复杂任务时的集群效能,对于提升城市物流、海洋监测、边境安防、区域搜救等的作业效率具有重要意义。
3、(二)技术方案
4、为实现该发明目的,本发明采用如下技术方案:
5、一种基于群体智能搜索的无人机平台与载荷一体化设计方法,其特征在于,所述设计方法在实施时至少包括如下步骤:
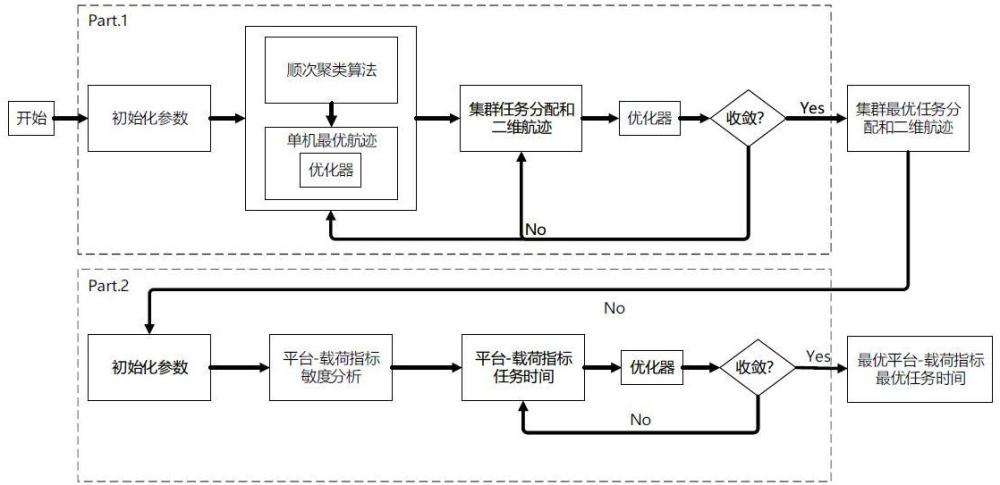
6、ss1. 在任务规划的初始化阶段,对任务区域的目标点进行顺次聚类处理,根据目标点的地理坐标信息,应用顺次聚类算法,将杂乱无序的目标点聚类划分为若干数量的聚类圆,每个聚类圆对应一个无人机的任务分配,在聚类过程中,引入 d和 δd两个优化参数对聚类过程进行调整,优化参数 d表示聚类圆的直径并直接影响聚类圆的数量以及每个聚类能够覆盖的目标点的数量,优化参数 δd表示在聚类转移过程中新的聚类的初始点与上一聚类圆心的最小位置偏差并直接影响聚类圆之间的相对位置,通过优化这两个参数以调整聚类圆的大小和相对位置,以优化无人机集群的空间分布和对目标区域及其中目标点的均匀覆盖,同时确保每个聚类圆内目标点的地理位置接近,避免不必要的航迹重叠,从而降低无人机在目标点间转移的距离以提升任务效率;
7、ss2. 对于每个聚类圆内所确定的目标点集合,应用基于蚁群优化算法(antcolony optimization algorithm)的单机最优航迹算法,为每架无人机规划最短二维航迹,以逼近旅行商问题(traveling salesman problem, tsp)的最优解,所述蚁群优化算法模拟自然界蚂蚁觅食行为的最短路径原理,通过迭代寻找无人机从起点至各个目标点再返回起点的最短可能航迹;
8、ss3. 结合应用集群任务规划优化算法,通过多目标优化函数对聚类圆直径 d和聚类圆定位间距 δd进行优化,使得无人机数量、平均二维航迹长度、最长二维航迹长度和各机二维航迹长度标准差达到最优,以实现对无人机数量和总体二维航迹配置方案的全局优化,所述多目标优化函数的表达式为:
9、
10、式中, n为集群中无人机数量并等于聚类圆的数量, li为集群中各单机无人机的二维航迹长度,i=1,2,…, n,mean{ li}为集群中各单机无人机的平均二维航迹长度,max{ li}为集群中各单机无人机的最长二维航迹长度, σ1为集群中各单机无人机二维航迹长度 li的标准差, w1、 w2、 w3、 w4表示各对应指标的加权系数并可根据不同任务要求进行调整;
11、ss4. 在三维空间航线规划中,综合考虑无人机平台性能和光电载荷性能指标,对光电载荷的成像需求和无人机飞行特性进行指标分析,至少选择无人机的爬升下降角度 α、光电载荷可视距离 l gd和光电载荷可视角度 θ gd三个指标参数作为影响无人机三维搜索路径和任务时间的主要指标,其中,无人机的爬升下降角 α表示无人机从巡航高度到平飞高度或从平飞高度到巡航高度的变化角度,光电载荷可视距离 l gd表示光电载荷在平飞高度下能够探测到目标点的最大水平距离,光电载荷可视角度 θ gd表示光电载荷在平飞高度下能够探测到目标点的最大仰角;
12、ss5. 使用sobol敏感性分析方法对 α、 l gd和 θ gd三个指标参数进行任务时间敏感度分析,基于方差分解计算各指标参数的全局敏感度指数和一阶敏感度指数并据此分析各单一指标参数及各指标参数组合对优化目标函数 f( α, l gd,, θ gd)的总方差的贡献,判断各个指标参数对任务总时效的影响程度并据此确定指标参数优化的重点,一阶敏感度指数越大表示单个指标参数的影响越大,全局敏感度指数越大表示指标参数与其他指标参数的交互作用越大;
13、ss6. 基于步骤ss5的sobol敏感性分析结果,采用集群任务规划优化算法,通过优化目标函数 f( α, l gd,, θ gd)对 α、 l gd和/或 θ gd三个指标参数进行优化,使得集群中各单机无人机的平均搜索任务时间和最大搜索任务时间达到最优,所述优化目标函数 f( α, l gd,, θ gd)的表达式为:
14、
15、式中, ti表示集群中各单机无人机的搜索任务时间,i=1,2,…, n, n为集群中无人机数量,mean{ ti}为集群中各单机无人机的平均搜索任务时间, w5、 w6表示加权系数并可根据不同任务要求进行调整;
16、ss7. 根据步骤ss3、ss6的优化结果,确定最优的无人机集群规模、每架无人机的航迹以及无人机平台与载荷性能指标,确保无人机集群可以在最短时间内完成多目标搜索任务。
17、优选地,步骤ss1中,所述顺次聚类算法在实施时至少包括以下子步骤:
18、ss1.1. 输入目标点集合的坐标{ p tar}、集结点坐标{ p jjd}及参考点坐标 p0;
19、ss1.2 对算法参数进行初始化,包括但不限于聚类圆直径 d和聚类圆定位间距δ d;
20、ss1.3 确定距离参考点 p0最近的点 p ini- i并将其作为第 i个聚类圆的初始点,且确保 p ini- i至任意已存在聚类圆心点 c的距离大于或等于聚类圆定位间距δ d;
21、ss1.4 以初始点 p ini- i为起点,搜索在直径 d范围内与其距离最远的目标点 p far-i,并据此确定第 i个聚类圆心 c i的坐标,其中;
22、ss1.5 以 c i为圆心并基于聚类圆直径 d画出一个聚类圆,从目标点集合{ p tar}中按照距离搜索并记录落在该聚类圆内的目标点,形成目标点聚类集合{ p ci,j}并形成为第 i个聚类圆,其中 j为第 i个聚类圆内的目标点的序号;
23、ss1.6 在第 i个目标点聚类集合{ p ci,j}中,对于每个聚类圆心 c i,选择距离其最近的目标点作为第 i个聚类圆内的集结点 p jjd, i;
24、ss1.7 在目标点集合{ p tar}中排除已被划分到目标点聚类集合{ p ci,j}中的目标点,并更新剩余目标点集合;
25、ss1.8 重复执行步骤ss1.3 ~ ss1.7,直至目标点集合{ p tar}为空,确保所有目标点都被遍历并被适当地分配到聚类圆内,得到所有的聚类圆及其内部的目标点和集结点。
26、进一步地,上述步骤ss1.3中,在确定距离参考点 p0最近的点 p ini- i时,使用最近邻搜索算法(nearest neighbor search algorithm),根据各目标点的地理坐标信息,计算目标点与参考点 p0的欧氏距离(euclidean distance),并从中选出最小的距离对应的目标点作为 p ini- i;
27、上述步骤ss1.4中,在直径 d范围内搜索距离初始点 p ini- i最远的目标点 p far-i时,使用最远邻搜索算法(farthest neighbor search algorithm),根据目标点的地理坐标信息,计算目标点与初始点 p ini- i的欧氏距离,并从中选出最大的距离对应的目标点作为 p far-i;
28、上述步骤ss1.5中,在按照距离搜索并记录第 i个目标点聚类集合{ p ci,j}时,使用半径搜索算法(radius search algorithm),根据目标点的地理坐标信息,计算目标点与聚类圆心 c i的欧氏距离,并从中选出小于等于 d/2的距离对应的目标点作为{ p ci,j}的元素;
29、上述步骤ss1.8中,在迭代直至目标点集合{ p tar}为空,所有目标点都被遍历的过程中,使用动态更新算法(dynamic update algorithm),根据目标点的地理坐标信息,实时更新目标点集合{ p tar}的元素,每当一目标点被划分到一个聚类圆时,就从{ p tar}中删除该目标点,直到{ p tar}中无任何元素为止。
30、优选地,上述步骤ss2中,对于每个聚类圆内所确定的目标点集合,采用蚁群优化算法求解无人机的最短航迹路径,得到每个无人机的二维航迹,所述蚁群优化算法的具体流程至少包括以下子步骤:
31、ss2.1. 初始化一定数量的人工蚂蚁,每只人工蚂蚁代表一条可能的航迹路径,并将它们随机地分配到聚类圆内各个目标点上;
32、ss2.2. 每只人工蚂蚁按照一定的概率选择聚类圆内下一个要访问的目标点,选择的依据是目标点之间的距离和信息素浓度,且在访问过程中释放信息素,选择访问目标点的依据是目标点之间的距离和信息素浓度,距离越近,信息素越多,选择的概率越大;
33、ss2.3. 每只人工蚂蚁在访问完聚类圆内所有的目标点后返回出发点,形成一条完整的航迹路径,并计算该航迹路径的长度;
34、ss2.4. 更新信息素浓度,根据路径长度和信息素挥发系数对每只人工蚂蚁走过的航迹路径上的信息素进行增减,且路径越短释放的信息素越多;
35、ss2.5. 各条航迹路径上的信息素随着时间的推移而逐渐挥发,使得旧的航迹路径信息逐渐淡化,为新的航迹路径信息提供空间;
36、ss2.6. 重复上述步骤ss2.1 ~ ss2.5,直到达到预设的最大迭代次数或者找到满足条件的最短路径,输出最短的航迹路径。
37、优选地,上述步骤ss3、ss6中,使用集群任务规划优化算法对目标优化函数 f( d, δd)或 f( α, l gd,, θ gd)进行优化,以得到最优的聚类圆直径 d和聚类圆定位间距 δd或最优的 α、 l gd和/或 θ gd,且所述集群任务规划优化算法为粒子群优化算法pso和/或乌鸦搜索优化算法cso。
38、进一步地,所述粒子群优化算法pso的具体流程至少包括以下子步骤:
39、ssp1. 初始化一定数量的粒子,每个粒子代表一个可能的解,即一组聚类直径 d和聚类圆定位间距 δd的值或一组 α、 l gd和/或 θ gd的值,随机地分配到解空间中;
40、ssp2. 计算每个粒子的适应度值,即多目标优化函数的值,根据适应度值,确定每个粒子的个体最优解和全局最优解;
41、ssp3. 每个粒子根据自身的速度和位置,以及个体最优解和全局最优解,更新自身的速度和位置,向着最优解的方向移动;
42、ssp4. 重复上述步骤ssp1 ~ ssp3,直到达到预设的迭代次数或收敛条件,输出全局最优解。
43、进一步地,所述乌鸦搜索优化算法cso的具体流程包括以下子步骤:
44、ssc1. 初始化一定数量的乌鸦,每只乌鸦代表一个可能的解,即一组聚类直径 d和聚类圆定位间距 δd的值或一组 α、 l gd和/或 θ gd的值,随机地分配到解空间中,并为每只乌鸦分配一个初始位置和速度;
45、ssc2. 设置最大迭代次数 t max和适应度阈值 θ fit,并初始化全局最优解 g best为一个较大的值;
46、ssc3. 每一代循环中,计算并更新每只乌鸦的适应度值和最优解,根据一定的策略和概率更新每只乌鸦的速度和位置,进行合作和竞争行为,判断是否达到终止条件;
47、ssc4. 返回全局最优解 g best,即最优的聚类直径 d和聚类圆定位间距 δd的值或最优的 α、 l gd和/或 θ gd的值。
48、进一步地,上述步骤ssc3中,对于每一代循环,从 t=1到 t max至少执行以下操作步骤:
49、ssc3.1. 对于每只乌鸦,基于其当前位置计算其适应度值,即多目标优化函数的值,并根据其适应度值更新其个体最优解 p best;
50、ssc3.2. 如果某只乌鸦的个体最优解 p best优于全局最优解 g best,则将 g best更新为 p best;
51、ssc3.3. 基于惯性权重、学习因子、随机因子、当前速度、个体最优解和/或全局最优解的位置,更新每只乌鸦的速度和位置,使其向全局最优解 g best或个体最优解 p best靠近;
52、ssc3.4. 进行合作行为,对于每只乌鸦,选择其周围乌鸦中当前已知的最优解,即适应度值最高的解,作为其搜索策略的参考,根据一定的概率,将其位置更新为该最优解的位置或其附近的位置;
53、ssc3.5. 进行竞争行为,即对于每只乌鸦,选择其周围乌鸦中当前已知的最差解,即适应度值最低的解,作为其搜索策略的对手,根据一定的概率,如果发现比该最差解更优的解,即适应度值更高的解,则将其位置更新为该更优解的位置或其附近的位置;
54、ssc3.6. 判断是否达到终止条件,即迭代次数达到最大迭代次数 t max或全局最优解的适应度值低于阈值 θ fit,如果是,则结束循环,如果不是,则继续下一代循环。
55、进一步地,所述集群任务规划优化算法同时使用粒子群优化算法pso和乌鸦搜索优化算法cso,分别对多目标优化函数进行优化,所述粒子群优化算法pso模拟自然界中鸟群或鱼群的群体行为,通过迭代更新每个粒子的速度和位置,使其向全局最优解或个体最优解靠近,所述乌鸦搜索优化算法cso模拟自然界中乌鸦的合作和竞争行为,通过概率更新每只乌鸦的速度和位置,使其向周围乌鸦中的最优解或最差解靠近或远离,如果两种算法得到的结果相同,说明原问题已经达到收敛,否则继续迭代直至满足终止条件。
56、优选地,上述步骤ss5中,采用sobol敏感性分析方法对 α、 l gd和 θ gd三个指标参数进行任务时间敏感度分析时,其实施流程至少包括如下子步骤:
57、ss5.1. 将优化目标函数 f( α, l gd,, θ gd)表示为单一指标参数及各指标参数互相组合的函数,即:
58、
59、其中, x1= α, x2= l gd, x3= θ gd, f0为常数项, fi( xi)为一阶效应项,表示单个指标参数对目标函数的影响, f ij( x i ,x j)为二阶交互效应项,表示两个指标参数之间的相互作用对目标函数的影响, f123( x1, x2, x3)为三阶交互效应项,表示三个指标参数之间的相互作用对目标函数的影响;
60、ss5.2. 计算优化目标函数 f( α, l gd,, θ gd)的总方差 d以及各个效应项的偏方差 d i、 d ij和 d123,其中:
61、
62、ss5.3. 计算各个指标参数的一阶敏感度指数 s i、二阶敏感度指数 s ij和三阶敏感度指数 s123,其中:
63、
64、ss5.4. 计算各个指标参数的全局敏感度指数 ts i,其中:
65、
66、ss5.5. 根据一阶敏感度指数 s i和全局敏感度指数 ts i的大小,判断各个指标参数对对优化目标函数 f( α, l gd,, θ gd)的总方差 d的影响程度,一阶敏感度指数 s i越大,表示单个指标参数的影响越大,全局敏感度指数 ts i越大,表示指标参数与其他指标参数的交互作用越大。
67、(三)技术效果
68、同现有技术相比,本发明的基于群体智能搜索的无人机平台与载荷一体化设计方法,具有以下有益且显著的技术效果:
69、(1)本发明提出了一种基于群体智能搜索的无人机平台与载荷一体化设计方法,该方法通过建立集群搜索任务规划算法框架,结合改进顺次聚类算法、蚁群算法、粒子群优化算法和乌鸦搜索优化算法等多算法联合优化策略,实现对无人机数量的科学决策,以及在二维和三维层面上的最优任务调度和指标匹配。该方法能够有效应对强时效、多任务目标的区域搜索任务,实现无人机集群的规模、航线和平台-载荷指标的一体化设计,提高无人机集群的空间分布和目标区域的均匀覆盖,降低无人机在目标点间转移的距离,缩短无人机的搜索任务时间,提升无人机集群的应用效率和效果。
70、(2)本发明通过将无人机平台性能和光电载荷性能指标作为影响任务完成能力的重要因素,将问题提升至三维空间,综合考虑无人机的爬升下降角度、光电载荷可视距离和光电载荷可视角度等三个指标参数,使用sobol敏感性分析方法和集群任务规划优化算法对这些指标参数进行优化,实现无人机平台与载荷性能指标的最优匹配,提升任务规划的时效性和精确性,增强无人机集群的集群效能。
71、(3)本发明通过采用基于位置坐标进行聚类的顺次聚类方法,引入了聚类圆直径和聚类圆定位间距两个优化量,通过优化这两个优化量以调整聚类圆的大小和相对位置,以优化无人机集群的空间分布和对目标区域及其中目标点的均匀覆盖,同时确保每个聚类圆内目标点的地理位置接近,避免不必要的航迹重叠,从而降低无人机在目标点间转移的距离以提升任务效率。该方法还采用了基于蚁群优化算法的单机最优航迹算法,为每架无人机规划最短二维航迹,以逼近旅行商问题的最优解,该算法模拟自然界蚂蚁觅食行为的最短路径原理,通过迭代寻找无人机从起点至各个目标点再返回起点的最短可能航迹。
72、(4)本发明通过采用同时使用粒子群优化算法和乌鸦搜索优化算法的集群任务规划优化算法,通过多目标优化函数对聚类圆直径和聚类圆定位间距或无人机的爬升下降角度、光电载荷可视距离和光电载荷可视角度等指标参数进行优化,使得无人机数量、平均二维航迹长度、最长二维航迹长度和各机二维航迹长度标准差或平均搜索任务时间和最大搜索任务时间达到最优,以实现对无人机数量和总体二维航迹配置方案或无人机平台与载荷性能指标的全局优化。该算法利用了粒子群优化算法的全局搜索能力和乌鸦搜索优化算法的局部搜索能力,通过合作和竞争行为,避免了单一算法导致的局部最优问题,提高了优化结果的可靠性和稳定性。
73、(5)本发明通过采用sobol敏感性分析方法对无人机平台与载荷性能指标进行任务时间敏感度分析,基于方差分解计算各指标参数的全局敏感度指数和一阶敏感度指数并据此分析各单一指标参数及各指标参数组合对优化目标函数的总方差的贡献,判断各个指标参数对任务总时效的影响程度并据此确定指标参数优化的重点,该方法能够有效地评估各指标参数的重要性和敏感性,为指标参数的优化提供了依据和指导。
- 还没有人留言评论。精彩留言会获得点赞!