车底异物智能扫描识别系统及方法与流程
本发明涉及三维图像处理,尤其涉及车底异物智能扫描识别系统及方法。
背景技术:
1、三维图像处理技术领域是一门涉及捕获、分析、处理以及可视化三维图像数据的技术,领域通常包含从三维扫描设备获取图像数据,然后使用各种算法进行处理,如三维重建、特征提取、模式识别以及图像优化等。这些技术广泛应用于多个领域,包括医学成像、工业检测、虚拟现实,以及安全检查等。三维图像处理通过提供空间深度信息,能够更加精确和全面地理解物体的形状和结构,从而超越了传统二维图像处理技术的局限。
2、其中,车底异物智能扫描识别系统是一种利用三维图像处理技术来检测和识别车辆底部的异物或异常情况的系统,此系统的主要目的是为了提高安全性,防止潜在的安全威胁,例如检测是否有非法携带的物品或车辆底部的损伤。通过高精度的扫描设备捕获车底的三维图像,然后使用专门的算法分析这些图像,以识别出不属于车辆结构的异物。这样的系统在边境检查站、重要设施的入口,或者任何需要提高安全措施的地方都非常有用。
3、传统车底扫描系统在多方面存在局限。通常依靠单一算法或技术,识别准确率和适应性在复杂环境下受限,如在变化的光照或运动条件下效果不佳。动态变化处理不够灵敏,无法有效应对高速移动或环境变化的挑战,导致检测失败或误判。边缘识别上无法精确分辨复杂背景中的异物,增加漏检或误报风险。缺乏异构计算加速的支持,处理速度慢,响应时间长,影响扫描流程效率。缺少预测性扫描功能,难以适应车辆运动轨迹变化,导致扫描盲区或重复扫描,降低扫描效率和准确性。
技术实现思路
1、本发明的目的是解决现有技术中存在的缺点,而提出的车底异物智能扫描识别系统及方法。
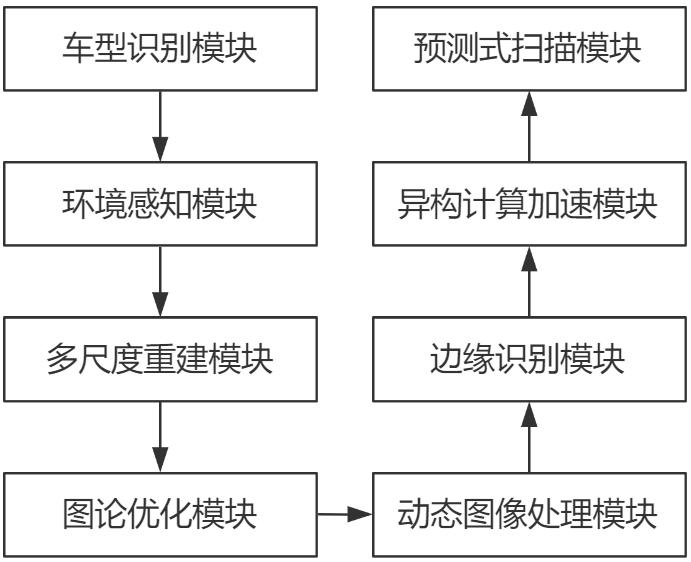
2、为了实现上述目的,本发明采用了如下技术方案:车底异物智能扫描识别系统包括车型识别模块、环境感知模块、多尺度重建模块、图论优化模块、动态图像处理模块、边缘识别模块、异构计算加速模块、预测式扫描模块;
3、所述车型识别模块基于车底图像,采用支持向量机算法进行车辆类型的初始识别,接着应用卷积神经网络进行深度特征提取和分类,对车辆类型进行识别,并为扫描流程匹配模式,生成车型识别数据;
4、所述环境感知模块基于车型识别数据,采用多传感器数据融合技术,结合自适应调整算法,分析并调整扫描设备的参数,包括光照强度和扫描速度,匹配差异化环境条件,生成环境匹配参数;
5、所述多尺度重建模块基于环境匹配参数,采用动态三维重建技术,根据车型和环境条件调整扫描策略和重建算法,基于精度或速率进行三维图像重建,生成三维重建图像;
6、所述图论优化模块基于三维重建图像,采用图像到图结构转换技术和图论分析方法,分析图像中的关键特征及其相互关系,优化特征识别和分类过程,生成优化后的图像特征;
7、所述动态图像处理模块基于优化后的图像特征,应用长短期记忆网络模型和时间序列分析技术,处理连续的扫描数据,对车辆底部动态变化进行响应,生成动态处理数据;
8、所述边缘识别模块基于动态处理数据,采用小波变换技术和形态学分析方法,进行边缘特征提取和分析,识别并分割车底环境中的异物边缘,生成边缘识别结果;
9、所述异构计算加速模块基于边缘识别结果,应用异构资源调度算法和神经网络加速技术,对处理流程进行调度和加速,进行物体识别,生成加速处理数据;
10、所述预测式扫描模块基于加速处理数据,采用运动预测模型和扫描参数动态调整策略,预测车辆未来位置和轨迹,优化扫描过程,生成预测扫描结果;
11、所述车型识别数据包括车辆类别、尺寸参数、形状描述,所述环境匹配参数包括光照强度设定、扫描速度设定,所述三维重建图像包括精度模式图像、速度优先模式图像,所述优化后的图像特征包括关键节点、空间关系图谱,所述动态处理数据包括动态特征序列、变化趋势分析,所述边缘识别结果包括异物边界线、边缘特征数据,所述加速处理数据包括加速识别结果、处理时间记录,所述预测扫描结果包括位置预测数据、轨迹估计图。
12、作为本发明的进一步方案,所述车型识别模块包括图像采集子模块、特征提取子模块、分类识别子模块;
13、所述图像采集子模块基于车底图像,应用图像预处理算法,将彩色图像转换为灰度图,接着使用canny算法突出车辆的轮廓和结构线条,通过高斯滤波器去除图像中的随机噪声,生成车底图像数据集;
14、所述特征提取子模块基于车底图像数据集,采用支持向量机算法,通过核函数将车辆图像映射到高维特征空间,利用线性分类器在该空间中构建最佳分割超平面,区分差异化车型的基础特征,结合几何形状分析技术,对车辆的轮廓、大小和比例进行测量和分析,提取车辆特征,生成基础车辆特征概况;
15、所述分类识别子模块基于基础车辆特征概况,运用卷积神经网络,该网络通过多层特征提取层逐步挖掘车辆的复杂特征,利用relu增强网络处理非线性特征,再通过池化层减少特征维度并保留关键特征信息,对车辆类型进行分类和识别,生成车型识别数据。
16、作为本发明的进一步方案,所述环境感知模块包括光照强度子模块、天气条件子模块、参数调整子模块;
17、所述光照强度子模块基于车型识别数据,采用数据融合算法,分析多传感器的光谱数据和车辆表面特性,通过光照适应性调整方法,根据实时光照条件和车辆反射率调整传感器的曝光时间和感光度,匹配差异化光照环境,生成光照匹配参数;
18、所述天气条件子模块基于环境光照匹配参数,采用气象模式识别算法,收集并分析气象站和传感器的气候数据,识别当前气候条件,包括温度、湿度和风速,运用天气适应算法,调整设备的防护措施和运行状态,匹配多种天气条件,生成天气适应性参数;
19、所述参数调整子模块基于天气适应性参数,应用动态扫描参数优化模型,结合环境光照和天气条件的实时数据,调节设备的扫描速度、分辨率和噪声处理级别,匹配环境中的扫描需求,生成环境匹配参数。
20、作为本发明的进一步方案,所述多尺度重建模块包括扫描策略子模块、重建算法子模块、参数优化子模块;
21、所述扫描策略子模块基于环境匹配参数,采用动态三维重建技术的初步步骤,通过自适应算法调整扫描参数,包括根据车型大小调整扫描范围,根据环境光照调节扫描深度,生成调整后的扫描策略;
22、所述重建算法子模块基于调整后的扫描策略,采用三维重建算法,通过立体视觉原理分析多视角下的图像数据,结合深度学习方法进行点云重建,构建初步三维模型;
23、所述参数优化子模块基于初步三维模型,采用优化算法,对模型进行调整,包括使用参数调整技术优化模型的尺度和比例,应用纹理映射技术增强模型的视觉细节,生成三维重建图像。
24、作为本发明的进一步方案,所述图论优化模块包括图像转换子模块、图论分析子模块、特征关联子模块;
25、所述图像转换子模块基于三维重建图像,采用图像分割和像素级映射算法,将图像中的每个像素点映射为图结构中的节点,同时通过边缘检测和颜色分析技术,确定节点之间的边和权重,构建图结构化图像数据;
26、所述图论分析子模块基于图结构化图像数据,采用网络中心性分析和图的谱聚类算法,对图中的节点进行中心性评估,通过谱聚类方法分析节点间的紧密度和分离度,识别图中的关键结构和特征节点,生成特征结构分析结果;
27、所述特征关联子模块基于特征结构分析结果,采用模式识别和关联规则挖掘算法,对特征节点间的关系进行分析,通过统计分析和关联度量确定节点间的相互影响和关系强度,优化特征的识别和分类过程,生成优化后的图像特征。
28、作为本发明的进一步方案,所述动态图像处理模块包括数据预处理子模块、深度学习训练子模块、动态调整子模块;
29、所述数据预处理子模块基于优化后的图像特征,采用数据规范化方法,对扫描图像进行归一化处理,将图像数据转换至统一的尺度和范围,接着使用高斯滤波器对图像进行平滑处理,去除随机噪声并提升图像质量,生成预处理图像数据;
30、所述深度学习训练子模块基于预处理图像数据,应用长短期记忆网络模型,对图像数据进行时序特征提取,分析图像中的动态变化模式,具体为车辆底部结构的变动,通过网络层的反复迭代学习,捕捉图像中的长期依赖关系,训练模型识别车辆底部的动态特征,生成训练后的模型数据;
31、所述动态调整子模块基于训练后的模型数据,实施动态调整策略,根据从连续扫描数据中学习到的动态特征,对处理策略进行实时调整,包括改变模型参数匹配差异化速度的车辆移动和环境变化,生成动态处理数据。
32、作为本发明的进一步方案,所述边缘识别模块包括小波变换子模块、形态学分析子模块、边缘跟踪子模块;
33、所述小波变换子模块基于动态处理数据,采用离散小波变换算法,对图像进行多尺度分析,通过调整分解级数和选择小波基,分离图像中的高频和低频信息,通过高频部分突出边缘细节,生成边缘高频特征数据;
34、所述形态学分析子模块基于边缘高频特征数据,采用形态学算法,对图像进行结构元素分析,执行腐蚀和膨胀操作,调整边缘轮廓,增强边缘的清晰度和连续性,生成优化后边缘特征数据;
35、所述边缘跟踪子模块基于优化后边缘特征数据,采用边缘跟踪算法,通过连续性和方向性分析,对边缘进行逐点细化追踪,进行异物边缘的识别和分割,生成边缘识别结果。
36、作为本发明的进一步方案,所述异构计算加速模块包括资源调度子模块、神经网络加速子模块、能效优化子模块;
37、所述资源调度子模块基于边缘识别结果,采用负载均衡算法进行资源调度,包括动态权重分配和资源优先级调整,通过策略动态分配包括cpu、gpu计算资源,进行计算任务分配和处理,生成优化资源分配数据;
38、所述神经网络加速子模块基于优化资源分配数据,应用数据流图优化和层次并行处理技术进行神经网络加速,其中数据流图优化包括节点合并和路径简化,层次并行处理在多计算节点上并行执行神经网络的多个层,生成加速神经网络数据;
39、所述能效优化子模块基于加速神经网络数据,采用硬件协同优化策略,包括算法的能效调整和硬件性能参数的微调,保持高速处理的同时,优化系统能效,生成加速处理数据。
40、作为本发明的进一步方案,所述预测式扫描模块包括运动预测子模块、扫描参数调整子模块、实时数据分析子模块;
41、所述运动预测子模块基于加速处理数据,采用运动学分析算法,分析车辆的速度和加速度数据,通过计算车辆的动力学方程,预测未来的位置和运动轨迹,同时参照道路条件和交通流,生成车辆位置轨迹预测数据;
42、所述扫描参数调整子模块基于车辆位置轨迹预测数据,采用自适应扫描算法,根据预测的车辆运动轨迹动态调整扫描参数,包括扫描角度的微调和扫描频率的优化,生成优化后的扫描参数;
43、所述实时数据分析子模块基于优化后的扫描参数,采用实时数据处理和分析算法,对扫描过程中收集的数据进行即时处理和分析,包括数据的滤波和噪声消除,生成预测扫描结果。
44、车底异物智能扫描识别方法,所述车底异物智能扫描识别方法基于上述车底异物智能扫描识别系统执行,包括以下步骤:
45、s1:基于车底图像,先进行灰度转换,然后使用支持向量机算法进行初步车型分类,接着利用卷积神经网络挖掘车型的深层特征,生成车型识别数据;
46、s2:基于所述车型识别数据,采用多传感器融合和自适应调整算法分析差异化环境下的光照强度和车辆表面反射率,调整扫描设备参数以适配环境变化,生成环境匹配参数;
47、s3:基于所述环境匹配参数,运用立体视觉和深度学习技术,根据车型特性和环境条件调整三维重建策略,通过优化和应用算法处理视觉信息,生成三维重建图像;
48、s4:基于所述三维重建图像,应用图像分割和像素映射算法将图像转换为图结构,利用图论分析方法分析图结构中的关键特征及其相互关系,生成优化后的图像特征;
49、s5:基于所述优化后的图像特征,运用长短期记忆网络和时间序列分析技术处理扫描数据中的动态变化,响应车底部结构的变动,生成动态处理数据;
50、s6:基于所述动态处理数据,采用运动预测模型和扫描参数调整策略预测车辆未来的位置和运动轨迹,优化扫描流程,生成预测扫描结果。
51、与现有技术相比,本发明的优点和积极效果在于:
52、本发明中,通过支持向量机算法和卷积神经网络增强车辆类型的准确识别与深度特征分类,提高识别的精确度。多传感器数据融合技术结合自适应调整算法有效适应不同环境,增强系统的灵活性。动态三维重建技术允许在不同精度和速率下工作,适应复杂环境。图论优化和长短期记忆网络模型提升图像特征分析效率,优化动态变化处理。小波变换技术和形态学分析方法细致识别边缘特征,提高异物检测精度。异构计算加速模块通过高效调度和加速处理流程,显著提高计算效率。预测式扫描模块优化扫描过程,提升动态环境下的响应速度和准确性。
- 还没有人留言评论。精彩留言会获得点赞!