一种自动驾驶车辆换道轨迹的优劣评价方法
本发明涉及自动驾驶车辆轨迹规划,尤其是涉及换道轨迹评价指标体系及方法。
背景技术:
1、自动驾驶车辆因其在提高交通安全和效率等方面的巨大潜力,已成为全球车企研发的热点,换道轨迹规划是其核心技术之一。轨迹规划算法研发过程有赖于轨迹评价指标体系和评价方法的构建,对规划轨迹性能的有效评价有助于快速迭代并优化算法,缩短算法开发周期,降低算法开发成本。
2、专利号cn202210900360.1公开了一种基于场景库的自动泊车轨迹评价方法与系统,该方法针对泊车场景建立了泊车轨迹评价指标,并生成轨迹评价报告以促进规划算法的持续改善。但该方法适用范围有限,仅能评价泊车场景下的规划轨迹;专利号cn202111229689.1公开了一种基于群决策和熵权法的换道轨迹评价方法,该方法提出了包含舒适性、高效性、平顺性等表征参数,并基于群决策理论和熵权法实现了换道轨迹的评价。但该方法构建的表征参数未考虑换道车辆动力学约束、道路条件约束及换道轨迹对交通流特性的影响;专利号cn202010353582.7公开了一种混合交通场景下智能网联车辆控制算法的性能评价方法及装置,该方法通过对交通流特性的分析实现了对车辆纵向控制算法的性能评价。上述轨迹评价方法在适用范围、考虑因素及评价角度等方面均具有一定的局限性。因此,自动驾驶车辆多维度换道轨迹评价指标体系还有待建立。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种自动驾驶车辆换道轨迹的优劣评价方法。该方法构建多维度换道轨迹评价指标体系,采用主客观相结合的方法对其优劣进行系统评价,可对规划算法的快速迭代优化起到指导作用,缩短算法开发周期,并降低算法开发成本。
2、本发明的目的可以通过以下技术方案来实现:
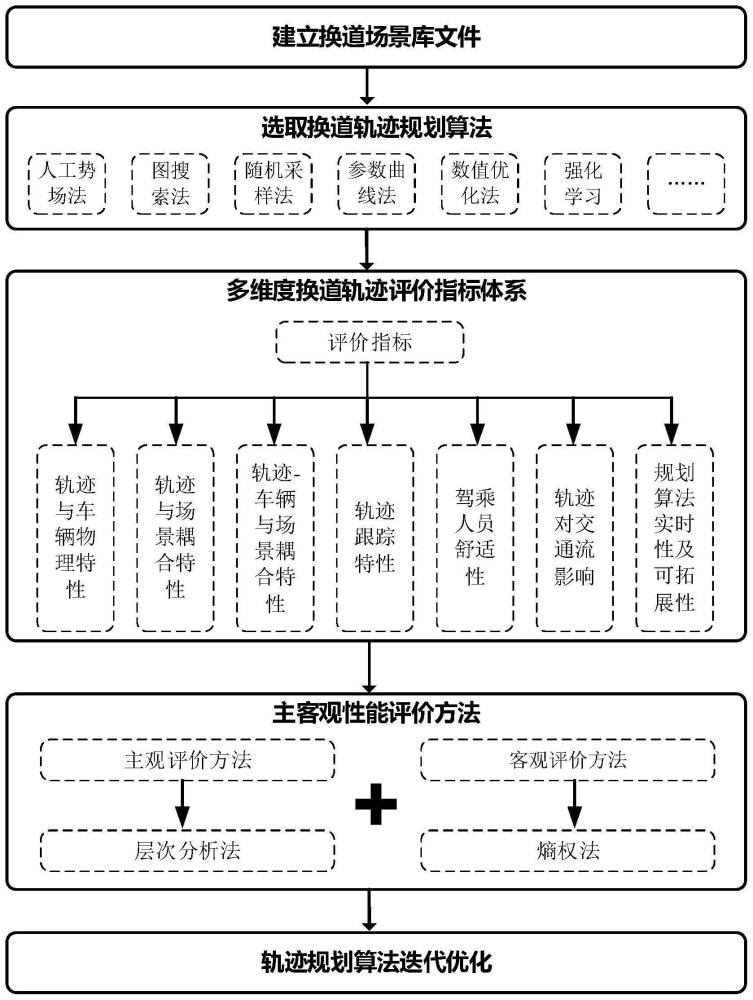
3、步骤1:根据真实场景建立用于轨迹评价分析的换道场景,并生成换道场景库文件;
4、步骤2:从场景库中选择一个或多个换道场景,并采用一种或多种换道轨迹规划算法,生成待评价的换道轨迹信息;
5、步骤3:构建多维度换道轨迹评价指标体系,包括:轨迹与车辆物理特性、轨迹与场景耦合特性、轨迹-车辆与场景耦合特性、轨迹跟踪特性、驾乘人员舒适性、轨迹对交通流影响、轨迹规划算法实时性及可拓展性;
6、步骤4:采用层次分析法与熵权法相结合的主客观评价方法对换道轨迹的优劣进行评价。
7、优选地,所述步骤3中的轨迹及车辆物理特性包括:换道轨迹上车辆横向位置、速度、加速度;换道轨迹上车辆纵向位置、速度、加速度;换道轨迹上车辆航向角;换道轨迹曲率;换道轨迹上车辆运行时间。
8、更加优选地,所述的换道轨迹上车辆横向位置等指标可进一步量化为其均值、最大值、最小值、标准差方差,具体为:
9、
10、其中,index表示指标,indexave表示指标均值,indexmax表示指标最大值,indexmin表示指标最小值,indexstd表示指标标准差。
11、优选地,所述步骤3中的轨迹与场景耦合特性包括:换道轨迹距障碍物最小距离、换道轨迹距道路边界距离以及考虑路面附着系数影响的车辆防侧滑限速约束。
12、更加优选地,所述的考虑路面附着系数的防侧滑限速约束计算方法具体为:
13、
14、其中,vsl为车辆发生侧翻时速度,μ为路面附着系数,g为重力加速度,kmax为换道轨迹最大曲率。
15、更加优选地,所述的考虑路面附着系数的防侧滑限速约束评价指标计算方法具体为:
16、
17、其中,γsl表示车辆行驶速度趋近与防侧滑限速的程度,v为车辆行驶车速。
18、优选地,所述步骤3中的轨迹-车辆与场景耦合特性包括:车辆防侧翻限速约束、车辆动力学稳定性约束。所述车辆动力学稳定性约束主要包括质心侧偏角约束、横摆角速度约束等。
19、更加优选地,所述的车辆防侧翻限速约束计算方法具体为:
20、
21、其中,m为整车质量,w为平均轮距,hg为车辆质心高度,fr为行驶阻力。
22、更加优选地,所述的车辆防侧翻限速约束评价指标计算方法具体为:
23、
24、其中,γrl表示车辆行驶速度趋近与防侧滑限速的程度,v为车辆行驶车速。
25、更加优选地,所述的质心侧偏角约束、横摆角速度约束指标计算方法具体为:
26、步骤3-1:构建质心侧偏角-横摆角速度相平面,并获取其稳定区域,表达式为:
27、b2≤β+b1r≤b3
28、其中,β代表车辆质心侧偏角,r代表车辆横摆角速度,b1,b2,b3均为稳定区域参数。
29、步骤3-2:基于规划的换道轨迹计算车辆理想质心侧偏角βexp和车辆理想横摆角速度rexp,表达式为:
30、
31、其中,φ期望速度方向角度,为期望航向角。
32、步骤3-3:利用车辆状态(βexp,rexp)至稳定边界的最小距离与稳定宽度的比值作为质心侧偏角约束、横摆角速度约束指标,表达式为:
33、
34、其中,γst表示车辆动力学稳定性裕度。
35、优选地,所述步骤3中的轨迹跟踪特性与车辆特性及运动控制器性能相关,主要指标包括:轨迹动态跟踪位移误差、轨迹动态跟踪航向角误差等。
36、优选地,所述步骤3中的驾乘人员舒适性指标主要包括:车辆纵向冲击度和最大横向加速度、驾乘人员偏好满足度。
37、更加优选地,所述的驾乘人员偏好满足度可通过驾驶模拟器试验获得,具体为:
38、步骤3-4:通过不同视角展示车辆运行状态;
39、步骤3-5:驾乘人员依据自身偏好程度对换道轨迹进行量化评分。
40、优选地,所述步骤3中的轨迹对交通流影响特性,主要指标包括:交通流平均车速、交通流激波特征(如激波范围、持续时间)。
41、优选地,所述步骤3中的轨迹规划算法实时性及可拓展性,主要指标包括:轨迹规划算法在车载控制器中平均运行时间、轨迹规划算法在不同行驶场景下规划成功率、轨迹规划算法在面对突发障碍物情况下规划成功率。
42、更加优选地,所述规划成功率具体为:
43、
44、其中,η表示规划成功率,nfai表示规划失败次数,nsuc表示规划成功次数。车辆发生失稳、与障碍物或道路边界发生碰撞均表示规划失败。
45、优选地,所述的步骤4包括以下子步骤:
46、步骤4-1:采用层次分析法获得专家对各个评价指标的主观权重,并进行一致性检验,最终得到各个指标的主观权重ωsub;
47、步骤4-2:根据熵权法计算得到各个评价指标的客观权重ωobj;
48、步骤4-3:结合主客观评价权重,获得各个评价指标最终权重ωall,具体为:
49、
50、步骤4-4:对换道轨迹的优劣进行评价。
51、优选地,所述的步骤5包括以下子步骤:
52、步骤5-1:根据驾驶任务需求和各指标及综合评价结果,确定步骤2换道轨迹规划算法优化方向,提高换道轨迹综合评分;
53、步骤5-2:通过明确步骤3中所述车辆物理特性和提高步骤2所述换道轨迹规划算法中的安全性权重,使得换道轨迹满足车辆物理特性等约束的同时,增加与障碍物的最小距离,达到优化轨迹与车辆物理特性、轨迹与场景耦合特性和轨迹-车辆与场景耦合特性指标的目的;
54、步骤5-3:选取步骤3中所述驾乘人员舒适性指标较高换道轨迹,分析其换道时间和换道横、纵向加速度,得到不同驾乘人员对换道时间及换道横、纵向加速度的偏好,进而改变换道轨迹规划算法中有关换道时间及加速度分布的参数,达到优化驾乘人员舒适性指标的目的;
55、步骤5-4:选取步骤3中所述换道轨迹对交通流影响指标评分较低(对交通流影响较大)的换道轨迹,分析其纵向速度和加速度波动特性,通过调整换道轨迹规划算法中有关纵向速度及加速度的参数,使得换道轨迹避开上述波动特性,以降低对规划轨迹对交通流的影响;
56、上述技术方案,通过优化算法的结构和集成多种算法优势,从而提高算法实时性及鲁棒性,以达到优化规划算实时性及可拓展性的目的。
57、与现有技术相比,本发明具有以下有益效果:
58、1)多维度换道轨迹评价指标体系。构建了包含轨迹与车辆物理特性、轨迹与场景耦合特性、轨迹-车辆与场景耦合特性、轨迹跟踪特性、驾乘人员舒适性、轨迹对交通流影响、轨迹规划算法实时性及可拓展性的多维度换道轨迹评价指标体系。
59、2)主客观相结合的评价方法。采用主观评价方法-层次分析法与客观评价方法-熵权法相结合的主客观评价方法对换道轨迹的优劣进行综合评价,可对规划算法的快速迭代优化起到指导作用。
- 还没有人留言评论。精彩留言会获得点赞!