基于仿真结构光图像的焊缝识别方法及装置
本发明属于结构光图像处理及焊缝识别的,具体涉及一种基于仿真结构光图像的焊缝识别方法及装置。
背景技术:
1、目前随着智能制造的发展,非接触式的结构光视觉传感器在工业中应用越来越广泛,尤其是在物体扫描重建、焊接缺陷检测、焊缝跟踪等领域。采用线结构光方式的视觉传感器,满足激光三角法测量模型,是一种非接触、测量速度快、精度较高的测量方式;其通过投射激光线到被测物体表面,形成激光条纹,由于被测物体表面几何形状的不同,因而导致激光条纹图像也不同;然后通过对不同的激光条纹图像进行图像处理,提取出激光条纹的位置,再根据激光三角测量模型计算出激光条纹上点的空间位置,提取被测物体表面的结构信息。
2、现有针对结构光条纹图像的处理方法较多,处理环节一般包括图像预处理(滤波、平滑、增强等)、图像分割、边缘提取及特征提取;并且在每一个环节中,可采用的方法也多种多样,例如图像滤波方法可采用高斯滤波、gabor滤波等,中心线提取可利用canny边缘提取、灰度重心法等。但现有方法通常应用于反射干扰较弱的焊缝图像处理中,但在强反射干扰情况下,或者灰度分布形态与实际有效的漫射激光条纹相似的时候,这些方法容易失效,从而出现识别偏差。
技术实现思路
1、本发明的主要目的在于克服现有技术的缺点与不足,提供一种基于仿真结构光图像的焊缝识别方法及装置,针对存在图像干扰的情况,准确提取出有效激光条纹的中心线,提高结构光视觉传感器的适用范围。
2、为了达到上述目的,本发明一方面提供一种基于仿真结构光图像的焊缝识别方法,包括下述步骤:
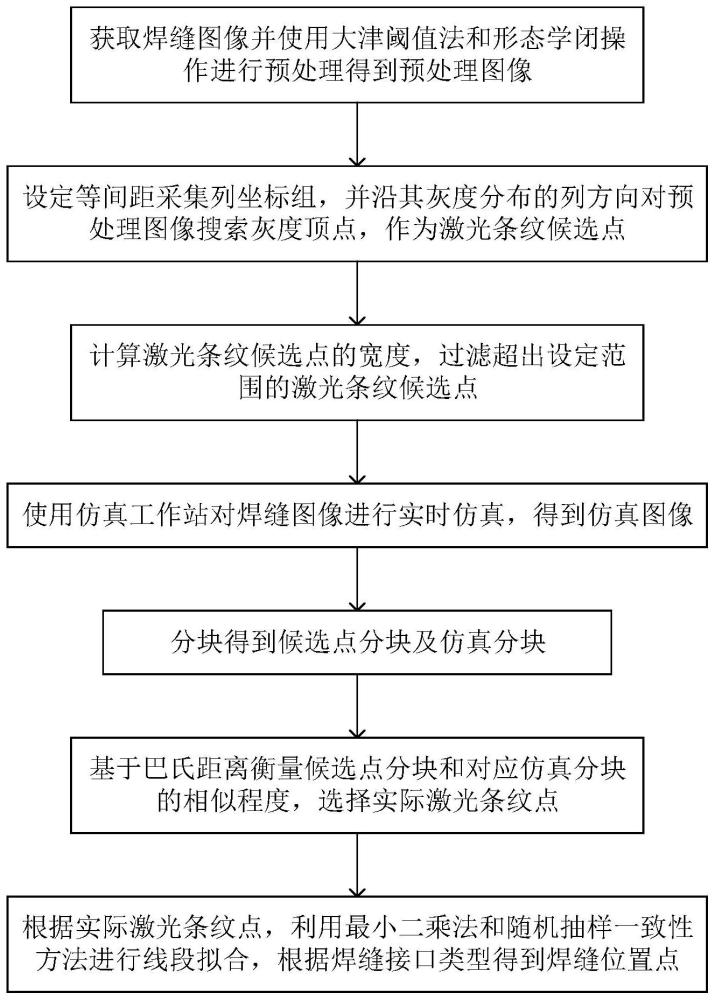
3、获取焊缝图像并使用大津阈值法和形态学闭操作进行预处理得到预处理图像;
4、设定等间距采集列坐标组,并沿其灰度分布的列方向对预处理图像搜索灰度顶点,作为激光条纹候选点;
5、计算激光条纹候选点的宽度,过滤超出设定范围的激光条纹候选点;
6、使用仿真工作站对焊缝图像进行实时仿真,得到仿真图像;
7、在预处理图像上以过滤后的激光条纹候选点为中心、设定宽度为边进行分块得到候选点分块;同时在仿真图像上以过滤后的激光条纹候选点为中心、设定宽度为边进行分块得到仿真分块;
8、基于巴氏距离衡量列坐标组中同一列的候选点分块和对应仿真分块的特征概率分布的相似程度,选择每一列中相似程度最大的候选点分块的中心作为实际激光条纹点;
9、根据实际激光条纹点,利用最小二乘法和随机抽样一致性方法进行线段拟合,根据焊缝接口类型得到焊缝位置点。
10、作为优选的技术方案,所述等间距采集列坐标组表示为:
11、cj=l*j(j=1,2…k)
12、其中,l为设定的采集距离,j为采集序号,k为最大采集数;
13、设等间距采集列坐标组的灰度分布为f(i),i是行坐标,沿灰度分布f(i)的列方向对预处理图像进行灰度顶点搜索,满足下述条件的像素点即作为激光条纹候选点:
14、a:以像素点i为中心、设定宽度为w的窗口范围内,f(i)为极大值,且f(i)大于阈值t;
15、b:在窗口范围内,梯度为正或为零的像素点数量nl:
16、c:在窗口范围内,梯度为负或为零的像素点数量nr:
17、其中,η∈(0,1)是比例系数。
18、作为优选的技术方案,所述过滤超出设定范围的激光条纹候选点,具体为:
19、获取每个激光条纹候选点的宽度w(i),公式为:
20、w(i)=nl+nr
21、其中,nl为窗口范围内,梯度为正或为零的像素点数量;nr为窗口范围内,梯度为负或为零的像素点数量;
22、判断每个激光条纹候选点的宽度w(i)是否属于[wmin,wmax],不属于则去除该激光条纹候选点;wmin和wmax计算公式为:
23、wmin=μ-3σ,wmax=μ+3σ
24、
25、其中,μ为所有激光条纹候选点的平均宽度,σ为所有激光条纹候选点的宽度标准差,n为激光条纹候选点个数。
26、作为优选的技术方案,所述选择每一列中相似程度最大的激光条纹候选点作为实际激光条纹点,具体为:
27、分别计算候选点分块和对应仿真分块的特征概率分布;
28、基于特征概率分布,计算候选点分块和对应仿真分块之间的巴氏距离得到相似程度;
29、选择相似程度最大的候选点分块的中心作为实际激光条纹点。
30、作为优选的技术方案,所述特征概率分布的计算公式为:
31、
32、
33、其中,分别为仿真分块和对应候选点分块的概率密度函数,分别表示仿真分块和对应候选点分块在特征u的直方图下的各级概率特征,δ为克罗内克函数,b为分块中像素点在直方图的分组索引,m为特征u的直方图的分组数,xi为仿真分块中第i个像素点的坐标,x为仿真分块的中心位置,n代表候选点分块中像素点数量,则为候选点分块中第i个像素点的坐标,c为候选点分块的归一化系数,k为基于核密度估计的概率密度计算方法的核函数,nh为仿真分块中像素点数量,ch为仿真分块的归一化系数;
34、所述巴氏距离的计算公式为:
35、
36、
37、其中,b(p,q)为列坐标组中同一列的候选点分块和对应仿真分块的特征概率分布的巴氏距离,u为特征,nu为特征数量,为候选点分块的特征概率分布,为对应仿真分块的特征概率分布。
38、作为优选的技术方案,所述利用最小二乘法和随机抽样一致性方法进行线段拟合,具体为:
39、随机选择两个实际激光条纹点a、b并连接成直线模型ab,定义ε为符合直线模型的阈值;
40、计算其他所有实际激光条纹点到直线模型ab的距离,距离小于等于ε的实际激光条纹点作为内点,大于ε的实际激光条纹点作为外点;
41、当所有实际激光条纹点计算完毕后,计算内点数目与实际激光条纹点总数的比值η,当η小于设定比例阈值η0计算完毕;将所有内点采用最小二乘法拟合得到直线模型ab的精确参数;
42、如果η大于设定比例阈值η0,则重新选择两个实际激光条纹点,并连接作为新的直线模型,重复上述操作。
43、作为优选的技术方案,所述焊缝接口类型包括连接型和非连接型;
44、当焊缝图像的焊缝接口类型为连接型时,则使用直线拟合求交法获取焊缝位置点,具体为:
45、从仿真图像中获取最靠近仿真焊缝点坐标(x0,y0);
46、获取线段拟合结果中最靠近仿真焊缝点的两条激光拟合线段,分别表示为y=k1x+b1和y=k2x+b2,求解两条激光拟合线段的交点作为焊缝位置点;
47、当焊缝图像的焊缝接口类型为非连接型时,则先提取特征点再进一步计算出焊缝位置点,具体为:
48、获取最左及最右的实际激光条纹点坐标(x1,y1)和(x2,y2)作为搜索点;
49、计算搜索点的梯度方向再根据梯度方向旋转90度获得搜索方向
50、沿着搜索方向前进距离l获得测试点,若测试点邻接8个像素内的梯度方向与搜索点的梯度方向夹角都小于阈值σ,则该测试点作为搜索点继续搜索,否则为错误点,停止搜索并将错误点前一个搜索点为目标特征点;
51、取两个目标特征点的平均值作为焊缝位置点。
52、另一方面,本发明提供一种基于仿真结构光图像的焊缝识别系统,应用于上述的基于仿真结构光图像的焊缝识别方法,包括图像预处理模块、候选点搜索模块、候选点过滤模块、仿真模块、图像分块模块、相似计算模块及焊缝位置获取模块;
53、所述图像预处理模块用于获取焊缝图像并使用大津阈值法和形态学闭操作进行预处理得到预处理图像;
54、所述候选点搜索模块用于设定等间距采集列坐标组,并沿其灰度分布的列方向对预处理图像搜索灰度顶点,作为激光条纹候选点;
55、所述候选点过滤模块用于计算激光条纹候选点的宽度,过滤超出设定范围的激光条纹候选点;
56、所述仿真模块用于使用仿真工作站对焊缝图像进行实时仿真,得到仿真图像;
57、所述图像分块模块用于在预处理图像上以过滤后的激光条纹候选点为中心、设定宽度为边进行分块得到候选点分块;同时在仿真图像上以过滤后的激光条纹候选点为中心、设定宽度为边进行分块得到仿真分块;
58、所述相似计算模块用于基于巴氏距离衡量列坐标组中同一列的候选点分块和对应仿真分块的特征概率分布的相似程度,选择每一列中相似程度最大的候选点分块的中心作为实际激光条纹点;
59、所述焊缝位置获取模块用于根据实际激光条纹点,利用最小二乘法和随机抽样一致性方法进行线段拟合,根据焊缝接口类型得到焊缝位置点。
60、本发明又一方面提供一种电子设备,包括:
61、至少一个处理器;以及,与所述至少一个处理器通信连接的存储器;其中,
62、所述存储器存储有可被所述至少一个处理器执行的计算机程序指令,所述计算机程序指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述的基于仿真结构光图像的焊缝识别方法。
63、本发明还一方面提供一种计算机可读存储介质,存储有程序,所述程序被处理器执行时,实现上述的基于仿真结构光图像的焊缝识别方法。
64、本发明与现有技术相比,具有如下优点和有益效果:
65、本发明基于视觉仿真信息,设计了去除干扰影响方法和焊缝定位方法,实现了焊缝的准确定位;本发明的焊缝识别过程中,针对强反射干扰导致的相似激光条纹生成问题,利用仿真图像信息进行排除干扰,获得实际激光条纹位置;总之,本发明的结构光焊缝定位方法,引入了视觉仿真给出的仿真激光条纹信息,大大提高了抗干扰能力,适应性较强,本发明方法扩展了结构光视觉传感器应用工作范围。
- 还没有人留言评论。精彩留言会获得点赞!