一种针对图像的智能化重定位方法及装置与流程
本发明涉及图像处理,尤其涉及一种针对图像的智能化重定位方法及装置。
背景技术:
1、随着科技的进步和计算机技术的发展,手持扫描仪的实时扫描重建应用越来越普遍和广泛,当前,在利用手持扫描仪进行实时扫描重建过程中,存在由于图像模糊或者扫描速度过快导致扫描断开丢失的情况,因此,对图像进行重定位的需求日益增多。
2、当前,针对图像重定位方式主要为对当前数据与已经扫描的历史数据逐一进行特征匹配,历史数据繁杂,匹配效率会大大降低,或者,在历史数据中随机抽取固定帧数与当前数据进行特征匹配,偶然的盲目抽取会使得检测效率和检测准确性低,进一步使得图像的重定位效率和重定位准确性低。因此,提供一种能够提高图像的重定位效率和重定位准确性的图像重定位方式显得尤为重要。
技术实现思路
1、本发明提供了一种针对图像的智能化重定位方法及装置,能够提高图像的重定位效率和重定位准确性。
2、为了解决上述技术问题,本发明第一方面公开了一种针对图像的智能化重定位方法,所述方法包括:
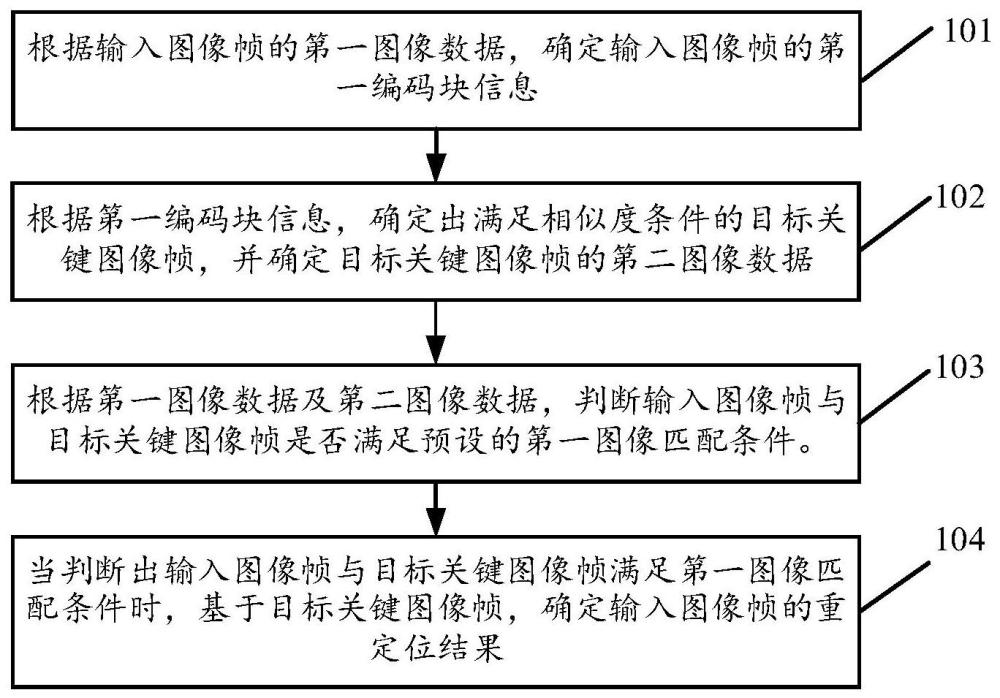
3、根据输入图像帧的第一图像数据,确定所述输入图像帧的第一编码块信息;
4、根据所述第一编码块信息,确定出满足相似度条件的目标关键图像帧,并确定所述目标关键图像帧的第二图像数据;
5、根据所述第一图像数据及所述第二图像数据,判断所述输入图像帧与所述目标关键图像帧是否满足预设的第一图像匹配条件;
6、当判断出所述输入图像帧与所述目标关键图像帧满足所述第一图像匹配条件时,基于所述目标关键图像帧,确定所述输入图像帧的重定位结果。
7、作为一种可选的实施方式,在本发明第一方面中,所述方法还包括:
8、判断所述输入图像帧是否满足预设的重定位需求条件;
9、当判断出所述输入图像帧满足所述重定位需求条件时,执行所述的根据所述第一编码块信息,确定出满足相似度条件的目标关键图像帧,并确定所述目标关键图像帧的第二图像数据的操作;
10、当判断出所述输入图像帧不满足所述重定位需求条件时,根据所述第一编码块信息,对所述输入图像帧执行相应的关键帧分析操作。
11、作为一种可选的实施方式,在本发明第一方面中,所述判断所述输入图像帧是否满足预设的重定位需求条件,包括:
12、确定与所述输入图像帧存在扫描关系的上一图像帧,并确定所述上一图像帧的第三图像数据;
13、根据所述第一图像数据及所述第三图像数据,判断所述输入图像帧与所述上一图像帧是否满足预设的第二图像匹配条件;
14、当判断出所述输入图像帧与所述上一图像帧满足所述第二图像匹配条件时,确定所述输入图帧不满足预设的重定位需求条件;
15、当判断出所述输入图像帧与所述上一图像帧不满足所述第二图像匹配条件时,确定所述输入图像帧满足预设的重定位需求条件。
16、作为一种可选的实施方式,在本发明第一方面中,所述根据所述第一编码块信息,对所述输入图像帧执行相应的关键帧分析操作,包括:
17、确定预设数据库中的每一关键图像帧的第二编码块信息;
18、根据所述第一编码块信息及每一所述关键图像帧的第二编码块信息,计算所述输入图像帧与每一所述关键图像帧的汉明距离;
19、从所有所述汉明距离中筛选出满足相似性筛选条件的目标汉明距离;
20、判断所述目标汉明距离是否小于等于预设的汉明距离阈值;
21、当判断出所述目标汉明距离小于等于所述汉明距离阈值时,将所述输入图像帧作为关键图像帧存储至所述预设数据库中。
22、作为一种可选的实施方式,在本发明第一方面中,所述根据输入图像帧的第一图像数据,确定所述输入图像帧的第一编码块信息,包括:
23、对输入图像帧执行随机采样操作,得到所述输入图像帧中的至少一个目标采样像素点;
24、对于每一所述目标采样像素点,根据所述输入图像帧的第一图像数据,对该目标采样像素点执行相应的编码块确定操作,得到该目标采样像素点对应的子编码块信息;
25、根据每一所述目标采样像素点及其对应的子编码块信息,确定所述输入图像帧的第一编码块信息。
26、作为一种可选的实施方式,在本发明第一方面中,对于每一所述目标采样像素点,所述根据所述输入图像帧的第一图像数据,对该目标采样像素点执行相应的编码块确定操作,得到该目标采样像素点对应的子编码块信息,包括:
27、根据所述输入图像帧的第一图像数据及设定的灰度值确定方式,确定该目标采样像素点的邻域像素灰度值;
28、根据所述邻域像素灰度值及确定出的中心像素灰度值,确定该目标采样像素点的比对编码结果;
29、根据所述比对编码结果及设定的最小值确定方式,确定最小编码结果,作为该目标采样像素点对应的子编码块信息。
30、作为一种可选的实施方式,在本发明第一方面中,所述根据所述第一图像数据及所述第二图像数据,判断所述输入图像帧与所述目标关键图像帧是否满足预设的第一图像匹配条件,包括:
31、根据所述第一图像数据,确定所述输入图像帧中的每一顶点的第一特征描述子结果,并根据所述第二图像数据,确定所述目标关键图像帧中的每一顶点的第二特征描述子结果;
32、根据所有所述第一特征描述子结果及所有所述第二特征描述子结果,确定每一所述第一特征描述子结果与每一所述第二特征描述子结果之间的欧式距离;
33、根据所有所述欧式距离,从所述输入图像帧的所有顶点及所述目标关键图像帧的所有顶点中确定出最佳匹配点对集合;
34、根据所述最佳匹配点对集合,计算所述输入图像帧与所述目标关键图像帧所对应的变换矩阵;
35、判断所述变换矩阵是否满足预设的矩阵收敛条件;
36、当判断出所述变换矩阵满足所述矩阵收敛条件时,确定所述输入图像帧与所述目标关键图像帧满足预设的第一图像匹配条件;
37、当判断出所述变换矩阵不满足所述矩阵收敛条件时,确定所述输入图像帧与所述目标关键图像帧不满足预设的第一图像匹配条件。
38、本发明第二方面公开了一种针对图像的智能化重定位装置,所述装置包括:
39、编码块确定模块,用于根据输入图像帧的第一图像数据,确定所述输入图像帧的第一编码块信息;
40、确定模块,用于根据所述第一编码块信息,确定出满足相似度条件的目标关键图像帧,并确定所述目标关键图像帧的第二图像数据;
41、判断模块,用于根据所述第一图像数据及所述第二图像数据,判断所述输入图像帧与所述目标关键图像帧是否满足预设的第一图像匹配条件;
42、图像重定位模块,用于当所述判断模块判断出所述输入图像帧与所述目标关键图像帧满足所述第一图像匹配条件时,基于所述目标关键图像帧,确定所述输入图像帧的重定位结果。
43、作为一种可选的实施方式,在本发明第二方面中,所述判断模块,还用于判断所述输入图像帧是否满足预设的重定位需求条件;当判断出所述输入图像帧满足所述重定位需求条件时,所述确定模块执行所述的根据所述第一编码块信息,确定出满足相似度条件的目标关键图像帧,并确定所述目标关键图像帧的第二图像数据的操作;
44、所述装置还包括:
45、关键帧分析模块,用于当所述判断模块判断出所述输入图像帧不满足所述重定位需求条件时,根据所述第一编码块信息,对所述输入图像帧执行相应的关键帧分析操作。
46、作为一种可选的实施方式,在本发明第二方面中,所述判断模块判断所述输入图像帧是否满足预设的重定位需求条件的方式具体包括:
47、确定与所述输入图像帧存在扫描关系的上一图像帧,并确定所述上一图像帧的第三图像数据;
48、根据所述第一图像数据及所述第三图像数据,判断所述输入图像帧与所述上一图像帧是否满足预设的第二图像匹配条件;
49、当判断出所述输入图像帧与所述上一图像帧满足所述第二图像匹配条件时,确定所述输入图帧不满足预设的重定位需求条件;
50、当判断出所述输入图像帧与所述上一图像帧不满足所述第二图像匹配条件时,确定所述输入图像帧满足预设的重定位需求条件。
51、作为一种可选的实施方式,在本发明第二方面中,所述关键帧分析模块根据所述第一编码块信息,对所述输入图像帧执行相应的关键帧分析操作的方式具体包括:
52、确定预设数据库中的每一关键图像帧的第二编码块信息;
53、根据所述第一编码块信息及每一所述关键图像帧的第二编码块信息,计算所述输入图像帧与每一所述关键图像帧的汉明距离;
54、从所有所述汉明距离中筛选出满足相似性筛选条件的目标汉明距离;
55、判断所述目标汉明距离是否小于等于预设的汉明距离阈值;
56、当判断出所述目标汉明距离小于等于所述汉明距离阈值时,将所述输入图像帧作为关键图像帧存储至所述预设数据库中。
57、作为一种可选的实施方式,在本发明第二方面中,所述编码块确定模块根据输入图像帧的第一图像数据,确定所述输入图像帧的第一编码块信息的方式具体包括:
58、对输入图像帧执行随机采样操作,得到所述输入图像帧中的至少一个目标采样像素点;
59、对于每一所述目标采样像素点,根据所述输入图像帧的第一图像数据,对该目标采样像素点执行相应的编码块确定操作,得到该目标采样像素点对应的子编码块信息;
60、根据每一所述目标采样像素点及其对应的子编码块信息,确定所述输入图像帧的第一编码块信息。
61、作为一种可选的实施方式,在本发明第二方面中,对于每一所述目标采样像素点,所述编码块确定模块根据所述输入图像帧的第一图像数据,对该目标采样像素点执行相应的编码块确定操作,得到该目标采样像素点对应的子编码块信息的方式具体包括:
62、根据所述输入图像帧的第一图像数据及设定的灰度值确定方式,确定该目标采样像素点的邻域像素灰度值;
63、根据所述邻域像素灰度值及确定出的中心像素灰度值,确定该目标采样像素点的比对编码结果;
64、根据所述比对编码结果及设定的最小值确定方式,确定最小编码结果,作为该目标采样像素点对应的子编码块信息。
65、作为一种可选的实施方式,在本发明第二方面中,所述判断模块根据所述第一图像数据及所述第二图像数据,判断所述输入图像帧与所述目标关键图像帧是否满足预设的第一图像匹配条件的方式具体包括:
66、根据所述第一图像数据,确定所述输入图像帧中的每一顶点的第一特征描述子结果,并根据所述第二图像数据,确定所述目标关键图像帧中的每一顶点的第二特征描述子结果;
67、根据所有所述第一特征描述子结果及所有所述第二特征描述子结果,确定每一所述第一特征描述子结果与每一所述第二特征描述子结果之间的欧式距离;
68、根据所有所述欧式距离,从所述输入图像帧的所有顶点及所述目标关键图像帧的所有顶点中确定出最佳匹配点对集合;
69、根据所述最佳匹配点对集合,计算所述输入图像帧与所述目标关键图像帧所对应的变换矩阵;
70、判断所述变换矩阵是否满足预设的矩阵收敛条件;
71、当判断出所述变换矩阵满足所述矩阵收敛条件时,确定所述输入图像帧与所述目标关键图像帧满足预设的第一图像匹配条件;
72、当判断出所述变换矩阵不满足所述矩阵收敛条件时,确定所述输入图像帧与所述目标关键图像帧不满足预设的第一图像匹配条件。
73、本发明第三方面公开了另一种针对图像的智能化重定位装置,所述装置包括:
74、存储有可执行程序代码的存储器;
75、与所述存储器耦合的处理器;
76、所述处理器调用所述存储器中存储的所述可执行程序代码,执行本发明第一方面公开的一种针对图像的智能化重定位方法。
77、本发明第四方面公开了一种计算机存储介质,所述计算机存储介质存储有计算机指令,所述计算机指令被调用时,用于执行本发明第一方面公开的一种针对图像的智能化重定位方法。
78、与现有技术相比,本发明实施例具有以下有益效果:
79、本发明实施例中,根据输入图像帧的第一图像数据,确定该输入图像帧的第一编码块信息;根据该第一编码块信息,确定出满足相似度条件的目标关键图像帧,并确定该目标关键图像帧的第二图像数据;根据该第一图像数据及该第二图像数据,判断该输入图像帧与该目标关键图像帧是否满足预设的第一图像匹配条件;当判断出该输入图像帧与该目标关键图像帧满足该第一图像匹配条件时,基于该目标关键图像帧,确定该输入图像帧的重定位结果。可见,本发明能够确定出输入图像帧的编码块信息,并根据输入图像帧的编码块信息,对输入图像帧执行图像重定位操作,有利于提高图像帧的重定位方式的全面性和合理性,进而有利于提高图像帧的重定位精准性和可靠性,以及还有利于提高图像帧的重定位效率和便捷性,从而有利于应对图像视觉发生变化的图像异向重定位需求,此外,相较于现有的图像重定位方式,本发明无需预先加载训练模型,有利于优化内存空间,以及无需根据每一扫描对象反复多次进行模型训练,有利于提高泛化能力。
- 还没有人留言评论。精彩留言会获得点赞!