室内平面图生成方法及相关设备
本技术涉及室内导航,尤其涉及一种室内平面图生成方法及相关设备。
背景技术:
1、室内楼层平面图在室内定位、导航和路线规划中起着关键作用,为室内定位提供结构信息支持。在复杂的多层建筑中,如果没有楼内平面图,很难为用户提供合理的导航,用户将需要更多时间才能到达陌生的商户,导致用户体验较差。
2、相关技术中通常基于专业勘测设备的部署,通过监督学习的方法生成室内平面图。这种硬件设备的部署需要人力参与,并且只能在有限的场景中进行推广。如果要在全国范围内进行推广部署,将面临较大的安装成本,并且后续的调试和维护也需要耗费大量开销。此外,额外部署的硬件设备还可能存在隐私保护的风险。
技术实现思路
1、有鉴于此,本技术的目的在于解决背景技术中提出的题述问题,提出一种室内平面图生成方法及相关设备。
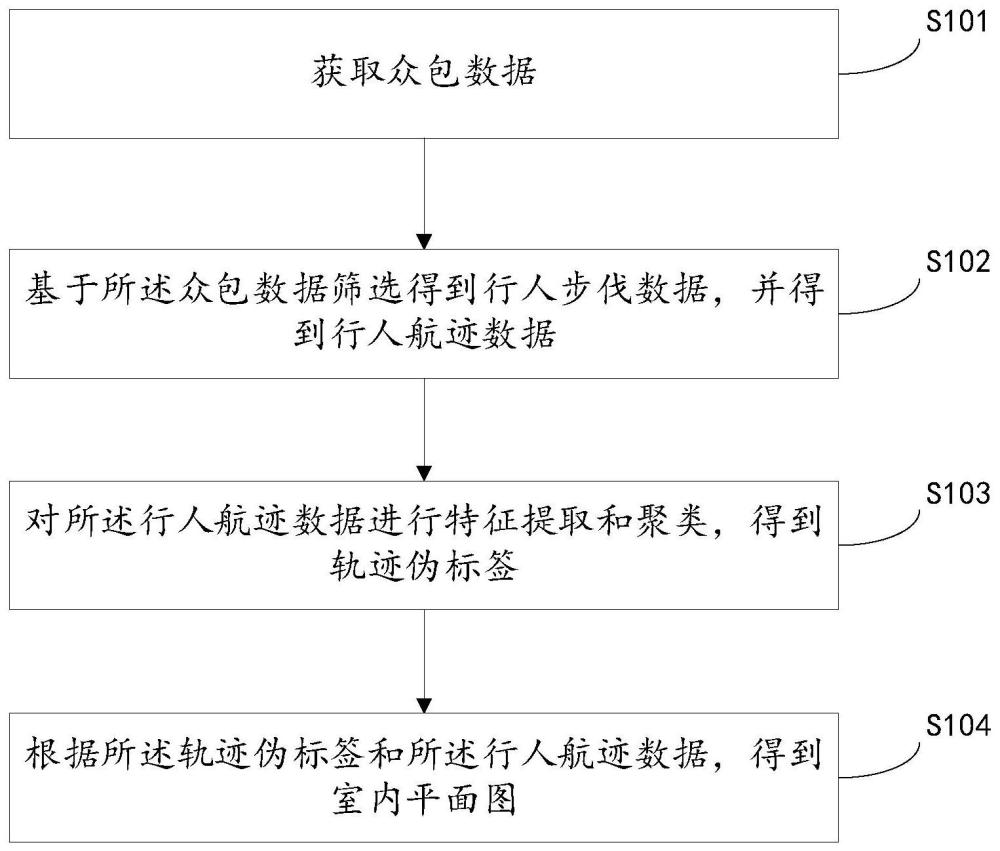
2、基于上述目的,本技术提供了室内平面图生成方法,其特征在于,包括:
3、获取众包数据;
4、基于所述众包数据筛选得到行人步伐数据,并得到行人航迹数据;
5、对所述行人航迹数据进行特征提取和聚类,得到轨迹伪标签;
6、根据所述轨迹伪标签和所述行人航迹数据,得到室内平面图。
7、可选地,所述根据所述众包数据筛选得到行人步伐数据,并得到行人航迹数据,包括:
8、基于所述众包数据,确定对应的行人行为模式;
9、响应于确定所述行人行为模式属于步行模式,基于所述众包数据确定行人步长估计数据和航向估计数据;
10、根据所述行人步长估计数据和所述航向数据,得到所述行人航迹数据。
11、可选地,所述众包数据包括加速度数据、角速度数据;
12、所述基于所述众包数据,确定对应的行人行为模式,包括:
13、对所述加速度数据进行过滤和投影,得到加速度特征;
14、基于所述加速度特征和第一机器学习模型,确定所述加速度数据对应的第一行人行为模式;所述第一机器学习模型基于二级窗口策略训练得到;
15、基于所述角速度数据和第二机器学习模型,确定所述角速度数据对应的第二行人行为模式;所述第二机器学习模型基于二级窗口策略训练得到;
16、基于所述第一行人行为模式和所述第二行人行为模式,确定最终行人行为模式。
17、可选地,基于所述众包数据确定行人步长估计数据,包括:
18、根据所述加速度数据,通过如下公式得到所述行人步长估计数据;
19、l=a*f+b;
20、f=var(acc)/ts;
21、其中,l表示步长估计数据,a、b表示步频系数和常数参数,通过训练得到,f表示步频,var(acc)表示加速度数据的方差值,ts表示加速度数据个数。
22、可选地,基于所述众包数据确定航向估计数据,包括:
23、基于所述加速度数据,通过如下公式,得到绝对朝向估计数据;
24、
25、(vfirst,vsecond)=pca(accn);
26、headpca=arctan2(vfirst,vsecond);
27、其中,accn表示东北天坐标系下的加速度投影结果,accb表示身体坐标系(bcs)下的加速度投影结果,表示所述加速度数据在预设旋转矩阵下的投影结果,vfirst表示水平加速度分量的第一个特征向量,vsecond表示水平加速度分量的第二个特征向量,headpca代表绝对航向;
28、基于所述加速度数据,通过如下公式,得到相对朝向变化数据;
29、
30、其中,表示相对航向变化率,表示移动终端在导航坐标系中的角速度,表示陀螺仪的零偏;
31、对所述绝对朝向估计数据和所述相对朝向变化数据,通过如下公式进行数据融合,得到航向估计数据;
32、θk+1=αθk+βθmag+γθgyr;
33、其中,θk表示前一步的航向,α,β和γ表示随θmag和θgyr波动的自适应参数,θmag表示所述绝对朝向估计数据,θgyr表示所述相对朝向变化数据。
34、可选地,所述对所述行人航迹数据进行特征提取和聚类,得到轨迹伪标签,包括:
35、对所述行人航迹数据进行特征提取,得到所述行人航迹数据对应的多个特征数据;
36、确定相同航迹的多个行人航迹数据,对该目标行人航迹数据对应的特征数据进行聚类,得到该航迹的轨迹为标签。
37、可选地,所述根据所述轨迹伪标签和所述行人航迹数据,得到室内平面图,包括:
38、将所述轨迹伪标签和所述行人航迹数据输入训练好的室内平面图生成模型,得到所述室内平面图;所述训练好的室内平面图生成模型对应的损失值小于预设数值;所述损失值的计算公式为:ltrack=-∑(wic*ytrue*log(ypred));其中,ltrack表示损失值,wic表示距离因子,通过公式得到,ytrue表示真实值,ypred表示通过所述室内平面图生成模型得到的值,c表示网格编码,表示尺度系数。
39、基于同一发明构思,本技术一个或多个实施例还提供了一种室内平面图生成装置,包括:
40、获取模块,被配置为获取众包数据;
41、行人航迹数据生成模块,被配置为基于所述众包数据筛选得到行人步伐数据,并得到行人航迹数据;
42、轨迹伪标签生成模块,被配置为对所述行人航迹数据进行特征提取和聚类,得到轨迹伪标签;
43、室内平面图生成模块,被配置为根据所述轨迹伪标签和所述行人航迹数据,得到室内平面图。
44、基于同一发明构思,本技术一个或多个实施例还提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任意一项所述的室内平面图生成方法。
45、基于同一发明构思,本技术一个或多个实施例还提供了一种非暂态计算机可读存储介质,所述非暂态计算机可读存储介质存储计算机指令,所述计算机指令用于使所述计算机执行上述任一所述的室内平面图生成方法。
46、根据上述内容,本技术提供的一种室内平面图生成方法,包括:获取众包数据;基于所述众包数据筛选得到行人步伐数据,并得到行人航迹数据;对所述行人航迹数据进行特征提取和聚类,得到轨迹伪标签;根据所述轨迹伪标签和所述行人航迹数据,得到室内平面图。通过本技术,可以基于众包数据通过非监督学习方法生成室内平面图,减少了专业人员、专业部署设备的成本,减小室内地图更新难度。同时,本技术还采用了在进行行人航迹计算时考虑行人行为模式对航迹的影响,并综合行人在步行模式下的步长数据和导航数据得到行人航迹数据,以使行人航迹计算结果更准确;基于从行人航迹数据提取的特征,进行多特征融合得到的伪标签,通过机器学习模型生成室内平面内,减轻室内平面图生成模型的训练压力。通过本技术的技术方案,可以室内平面图生成成本,减小室内地图更新难度。并且本技术的技术方案适用范围更广,不会受到数据采集设备和专业人员要求的限制。
47、本技术提供的一种室内平面图生成装置、电子设备以及计算机可读存储介质均能够实现上述物联数据接入方法的步骤,因此同样具备上述物联数据接入方法的有益效果。
- 还没有人留言评论。精彩留言会获得点赞!