一种基于VR技术的建筑设计方法与流程
本发明涉及建筑设计的,尤其涉及一种基于vr技术的建筑设计方法。
背景技术:
1、建筑设计是一个复杂而多样化的任务,涉及到空间规划、功能布局、材料选择等多个方面。传统的建筑设计方法主要依赖于平面图和纸质模型来表达设计概念,这种方式存在一些局限性,比如难以直观地展示空间感受、对设计效果的评估不够准确以及沟通交流的效率低下。随着虚拟现实(vr)技术的发展,它为建筑设计带来了全新的可能性。vr技术能够将建筑设计呈现为三维实时交互界面,设计师可以自由浏览和操作设计空间,更容易发现和解决设计中的问题,提高决策的准确性。尽管基于vr技术的建筑设计方法已经取得了一些进展,但在建模过程中仍存在技术成本高昂的问题,原始数据采集处理及建模加剧了人工成本和时间成本。针对该问题,本发明提出一种低成本自动化的vr建筑设计方法,实现建筑设计快速数字化构建。
技术实现思路
1、有鉴于此,本发明提供一种基于vr技术的建筑设计方法,目的在于:1)通过融合像素的邻域灰度偏差值对像素梯度方向上的像素梯度进行自适应叠加,得到像素的梯度强度,其中梯度强度越强,则表示在梯度方向上的梯度值均较大的像素越多,均为边缘像素的概率越大,实现边缘像素的自适应检测,并根据自适应检测结果识别建筑设计平面草图中的直线段以及门结构与墙体结构所连接的铰链位置,实现建筑设计平面草图的墙体结构、窗户结构以及门结构的检测识别;2)分别提取建筑设计平面草图中建筑结构端点的编码特征进行特征匹配,实现建筑设计平面草图与立面草图的匹配处理,进而得到建筑设计平面草图中不同建筑结构的高度,生成建筑设计vr模型,并构建vr设备中手势与建筑设计vr模型优化调整方式的对应关系,利用vr设备对建筑设计vr模型优化调整,并生成优化调整后建筑设计vr模型的平面图以及立面图,实现基于vr技术以及建筑设计草图的低成本建筑设计。
2、实现上述目的,本发明提供的一种基于vr技术的建筑设计方法,包括以下步骤:
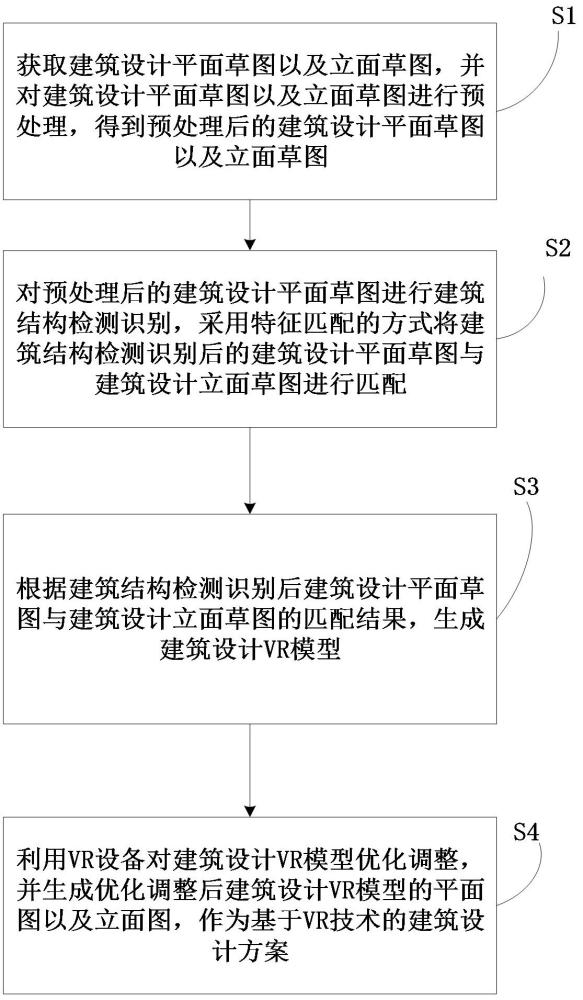
3、s1:获取建筑设计平面草图以及立面草图,并对建筑设计平面草图以及立面草图进行预处理,得到预处理后的建筑设计平面草图以及立面草图。
4、s2:对预处理后的建筑设计平面草图进行建筑结构检测识别,采用特征匹配的方式将建筑结构检测识别后的建筑设计平面草图与建筑设计立面草图进行匹配。
5、s3:根据建筑结构检测识别后建筑设计平面草图与建筑设计立面草图的匹配结果,生成建筑设计vr模型。
6、s4:利用vr设备对建筑设计vr模型优化调整,并生成优化调整后建筑设计vr模型的平面图以及立面图,作为基于vr技术的建筑设计方案。
7、作为本发明的进一步改进方法:
8、可选地,所述s1步骤中获取建筑设计平面草图以及立面草图,包括:
9、获取建筑设计平面草图以及立面草图,其中建筑设计平面草图包括所设计建筑的平面形状,房间的位置、大小、相互关系,墙体的位置、厚度、柱的截面形状与尺寸大小以及门窗的位置,为所设计建筑的水平正投影,建筑设计立面草图包括所设计建筑中各结构的高度,为所设计建筑在铅直投影面的正投影。
10、可选地,所述s1步骤中对建筑设计平面草图以及立面草图进行预处理,包括:
11、对建筑设计平面草图以及立面草图进行预处理,其中建筑设计平面草图的预处理流程为:
12、s11:对建筑设计平面草图中每个像素进行灰度化处理,其中像素的灰度化处理公式为:
13、。
14、其中:
15、表示像素的灰度值。
16、分别表示像素在rgb颜色通道的颜色值。
17、表示建筑设计平面草图中第x行第y列的像素,<mi>x</mi><mi>∈[1,n],y∈[1,m]</mi>,n表示建筑设计平面草图的行像素数目,m表示建筑设计平面草图的列像素数目。
18、s12:计算建筑设计平面草图中每个像素的梯度和梯度方向,其中像素的梯度和梯度方向为:
19、;
20、;
21、其中:
22、表示像素的梯度,表示像素的梯度方向。
23、s13:计算建筑设计平面草图中任意像素的邻域灰度值均值以及邻域灰度偏差值均值,其中像素的邻域灰度值均值为以像素为中心的像素区域的灰度值均值,像素的邻域灰度偏差值均值为:
24、。
25、其中:
26、表示以像素为中心的像素区域,,r表示像素区域中的任意像素,表示像素r的灰度值。
27、表示像素的邻域灰度偏差值均值。
28、s14:计算建筑设计平面草图中任意像素的梯度强度,其中像素的梯度强度为:
29、。
30、其中:
31、表示像素的梯度强度。
32、表示沿梯度方向向上遍历得到的最近像素的梯度值,表示沿梯度方向向下遍历得到的最近像素的梯度值。
33、s15:在灰度化处理后的建筑设计平面草图中,将梯度强度高于预设阈值的像素标记为边缘像素,得到预处理后的建筑设计平面草图。在本发明实施例中,采用同样的预处理方式对建筑设计立面草图进行预处理。
34、可选地,所述s2步骤中对预处理后的建筑设计平面草图进行建筑结构检测识别,包括:
35、对预处理后的建筑设计平面草图进行建筑结构检测识别,其中建筑结构检测识别流程为:
36、s21:对于建筑设计平面草图中任意连续边缘像素所构成的像素线,采用最小二乘法进行边缘像素拟合,直到拟合误差低于预设的误差阈值,并将像素线拆分为若干个直线段,其中每个直线段的长度n需要满足下式:
37、。
38、其中:
39、表示建筑设计平面草图中边缘像素的数目。
40、表示建筑设计平面草图中连续边缘像素所构成的像素线的数目。
41、过滤不满足的直线段。
42、s22:获取每个直线段的端点坐标;其中端点坐标即为端点在建筑设计平面草图中的像素坐标。
43、s23:遍历所保留的所有直线段,对于任意两条直线段,判断两条直线段是否平行,若平行则计算两条直线段之间的像素距离dis,若,则将两条直线段标记为建筑中的窗户结构,若,则将两条直线段标记为建筑中的墙体结构。
44、s24:遍历建筑设计平面草图中非直线段的像素,设置可调整半径r,以所遍历像素为圆心,r为半径画圆,通过调整可调整半径r,使得邻近像素所生成的大部分圆都交于一点,并将交于一点的大部分圆的圆心构成圆环,所构成圆环的圆心为建筑中门结构与墙体结构所连接的铰链位置,圆环半径为门结构的宽度。
45、可选地,所述s2步骤中采用特征匹配的方式将建筑结构检测识别后的建筑设计平面草图与建筑设计立面草图进行匹配,包括:
46、采用特征匹配的方式将建筑结构检测识别后的建筑设计平面草图与建筑设计立面草图进行匹配,其中特征匹配流程为:
47、计算建筑结构检测识别后的建筑设计平面草图中直线段端点以及铰链位置在8个方向区间的梯度值编码结果,其中所划分8个方向区间包括,依次用编号表示,其中端点像素的梯度值编码结果计算公式为:
48、<mi>code(</mi><msup><mi>x</mi><mi>*</mi></msup><mi>,</mi><msup><mi>y</mi><mi>*</mi></msup><mi>)=[</mi><msub><mi>k</mi><mn>1</mn></msub><mi>(</mi><msup><mi>x</mi><mi>*</mi></msup><mi>,</mi><msup><mi>y</mi><mi>*</mi></msup><mi>),...,</mi><msub><mi>k</mi><mi>i</mi></msub><mi>(</mi><msup><mi>x</mi><mi>*</mi></msup><mi>,</mi><msup><mi>y</mi><mi>*</mi></msup><mi>),...,</mi><msub><mi>k</mi><mn>8</mn></msub><mi>(</mi><msup><mi>x</mi><mi>*</mi></msup><mi>,</mi><msup><mi>y</mi><mi>*</mi></msup><mi>)]</mi>;
49、。
50、其中:
51、表示端点像素的梯度值编码结果。
52、表示端点像素在方向区间的梯度值编码结果。
53、以像素为中心的像素区域,,s为像素区域中梯度方向在方向区间范围内的像素,表示像素s的梯度方向,表示像素s的梯度。
54、计算预处理后建筑设计立面草图中任意边缘像素在8个方向区间的梯度值编码结果,并计算预处理后建筑设计立面草图中任意边缘像素梯度值编码结果与建筑设计平面草图中直线段端点以及铰链位置梯度值编码结果的余弦相似度。
55、选取建筑设计立面草图中与建筑设计平面草图中直线段端点以及铰链位置梯度值编码结果余弦相似度最高的像素,作为直线段端点以及铰链位置的对应像素,并获取对应像素在建筑设计立面草图中的高度,作为直线段端点以及铰链位置所对应建筑结构的高度。
56、可选地,所述s3步骤中根据匹配结果,生成建筑设计vr模型,包括:
57、根据建筑结构检测识别后的建筑设计平面草图与预处理后建筑设计立面草图的匹配结果,得到建筑结构检测识别后的建筑设计平面草图中每个建筑结构在建筑设计立面草图中的高度,生成建筑设计vr模型,其中建筑设计vr模型的生成流程为:
58、s31:根据建筑设计平面草图中直线段的建筑结构标记结果以及建筑结构高度,生成相同高度相同建筑结构类型的三维建筑结构模型。
59、s32:按照建筑设计平面草图中不同建筑结构的位置,在同一水平面对三维建筑结构模型进行摆放。
60、s33:将水平面以及水平面上所摆放的若干三维建筑结构模型作为建筑设计vr模型。
61、可选地,所述s4步骤中利用vr设备对建筑设计vr模型优化调整,并生成优化调整后建筑设计vr模型的平面图以及立面图,作为建筑设计方案,包括:
62、建筑设计师利用vr设备对建筑设计vr模型优化调整,其中基于vr设备的建筑设计vr模型优化调整方式包括:
63、s41:vr设备识别建筑设计师的放大/缩小手势,对建筑设计vr模型进行同比例放大/缩小处理。
64、s42:vr设备识别建筑设计师的手势旋转角度,对建筑设计vr模型进行角度的旋转处理,其中建筑设计vr模型中每个坐标点的旋转处理公式为:
65、。
66、其中:
67、表示建筑设计vr模型中未旋转的坐标点,表示对进行角度为的旋转处理后的坐标点。
68、s43:vr设备提供若干种颜色,建筑设计师可通过手势选取颜色对建筑设计vr模型中的任意三维建筑结构模型进行颜色渲染处理。
69、s44:vr设备提供不同建筑结构类型的三维建筑结构模型,建筑设计师可通过手势选取不同建筑结构类型的三维建筑结构模型,使用放大/缩小手势对所选取三维建筑结构模型进行尺寸放大/缩小处理,并将处理后的三维建筑结构模型放置于建筑设计vr模型中的任意位置。
70、s45:建筑设计师可通过手势对建筑设计vr模型中的任意三维建筑结构模型进行拖拽以及删除处理。
71、对优化调整后的建筑设计vr模型分别进行水平正投影以及在铅直投影面的正投影处理,生成优化调整后建筑设计vr模型的平面图以及立面图,作为基于vr技术的建筑设计方案。
72、为了解决上述问题,本发明提供一种电子设备,所述电子设备包括:
73、存储器,存储至少一个指令。
74、通信接口,实现电子设备通信;及
75、处理器,执行所述存储器中存储的指令以实现上述所述的基于vr技术的建筑设计方法。
76、为了解决上述问题,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质中存储有至少一个指令,所述至少一个指令被电子设备中的处理器执行以实现上述所述的基于vr技术的建筑设计方法。
77、相对于现有技术,本发明提出一种基于vr技术的建筑设计方法,该技术具有以下优势:
78、首先,本方案提出一种图像预处理方式以及建筑结构识别方式,对建筑设计平面草图以及立面草图进行预处理,其中建筑设计平面草图的预处理流程为:对建筑设计平面草图中每个像素进行灰度化处理,其中像素的灰度化处理公式为:
79、。
80、其中:表示像素的灰度值;分别表示像素在rgb颜色通道的颜色值;表示建筑设计平面草图中第x行第y列的像素,<mi>x</mi><mi>∈[1,n],y∈[1,m]</mi>,n表示建筑设计平面草图的行像素数目,m表示建筑设计平面草图的列像素数目;计算建筑设计平面草图中每个像素的梯度和梯度方向,其中像素的梯度和梯度方向为:
81、;
82、。
83、其中:表示像素的梯度,表示像素的梯度方向;计算建筑设计平面草图中任意像素的邻域灰度值均值以及邻域灰度偏差值均值,其中像素的邻域灰度值均值为以像素为中心的像素区域的灰度值均值,像素的邻域灰度偏差值均值为:
84、。
85、其中:表示以像素为中心的像素区域,,r表示像素区域中的任意像素,表示像素r的灰度值;表示像素的邻域灰度偏差值均值;计算建筑设计平面草图中任意像素的梯度强度,其中像素的梯度强度为:
86、。
87、其中:表示像素的梯度强度;表示沿梯度方向向上遍历得到的最近像素的梯度值,表示沿梯度方向向下遍历得到的最近像素的梯度值;在灰度化处理后的建筑设计平面草图中,将梯度强度高于预设阈值的像素标记为边缘像素,得到预处理后的建筑设计平面草图。对于建筑设计平面草图中任意连续边缘像素所构成的像素线,采用最小二乘法进行边缘像素拟合,直到拟合误差低于预设的误差阈值,并将像素线拆分为若干个直线段,其中每个直线段的长度n需要满足下式:
88、。
89、其中:表示建筑设计平面草图中边缘像素的数目;表示建筑设计平面草图中连续边缘像素所构成的像素线的数目;过滤不满足的直线段;获取每个直线段的端点坐标;其中端点坐标即为端点在建筑设计平面草图中的像素坐标;遍历所保留的所有直线段,对于任意两条直线段,判断两条直线段是否平行,若平行则计算两条直线段之间的像素距离dis,若,则将两条直线段标记为建筑中的窗户结构,若,则将两条直线段标记为建筑中的墙体结构;遍历建筑设计平面草图中非直线段的像素,设置可调整半径r,以所遍历像素为圆心,r为半径画圆,通过调整可调整半径r,使得邻近像素所生成的大部分圆都交于一点,并将交于一点的大部分圆的圆心构成圆环,所构成圆环的圆心为建筑中门结构与墙体结构所连接的铰链位置,圆环半径为门结构的宽度。本方案通过融合像素的邻域灰度偏差值对像素梯度方向上的像素梯度进行自适应叠加,得到像素的梯度强度,其中梯度强度越强,则表示在梯度方向上的梯度值均较大的像素越多,均为边缘像素的概率越大,实现边缘像素的自适应检测,并根据自适应检测结果识别建筑设计平面草图中的直线段以及门结构与墙体结构所连接的铰链位置,实现建筑设计平面草图的墙体结构、窗户结构以及门结构的检测识别。
90、同时,本方案提出一种建筑图像的特征匹配方式,采用特征匹配的方式将建筑结构检测识别后的建筑设计平面草图与建筑设计立面草图进行匹配,其中特征匹配流程为:计算建筑结构检测识别后的建筑设计平面草图中直线段端点以及铰链位置在8个方向区间的梯度值编码结果,其中端点像素的梯度值编码结果计算公式为:
91、<mi>code(</mi><msup><mi>x</mi><mi>*</mi></msup><mi>,</mi><msup><mi>y</mi><mi>*</mi></msup><mi>)=[</mi><msub><mi>k</mi><mn>1</mn></msub><mi>(</mi><msup><mi>x</mi><mi>*</mi></msup><mi>,</mi><msup><mi>y</mi><mi>*</mi></msup><mi>),...,</mi><msub><mi>k</mi><mi>i</mi></msub><mi>(</mi><msup><mi>x</mi><mi>*</mi></msup><mi>,</mi><msup><mi>y</mi><mi>*</mi></msup><mi>),...,</mi><msub><mi>k</mi><mn>8</mn></msub><mi>(</mi><msup><mi>x</mi><mi>*</mi></msup><mi>,</mi><msup><mi>y</mi><mi>*</mi></msup><mi>)]</mi>;
92、。
93、其中:表示端点像素的梯度值编码结果;表示端点像素在方向区间的梯度值编码结果;以像素为中心的像素区域,,s为像素区域中梯度方向在方向区间范围内的像素,表示像素s的梯度方向,表示像素s的梯度;计算预处理后建筑设计立面草图中任意边缘像素在8个方向区间的梯度值编码结果,并计算预处理后建筑设计立面草图中任意边缘像素梯度值编码结果与建筑设计平面草图中直线段端点以及铰链位置梯度值编码结果的余弦相似度;选取建筑设计立面草图中与建筑设计平面草图中直线段端点以及铰链位置梯度值编码结果余弦相似度最高的像素,作为直线段端点以及铰链位置的对应像素,并获取对应像素在建筑设计立面草图中的高度,作为直线段端点以及铰链位置所对应建筑结构的高度。本方案通过分别提取建筑设计平面草图中建筑结构端点的编码特征进行特征匹配,实现建筑设计平面草图与立面草图的匹配处理,进而得到建筑设计平面草图中不同建筑结构的高度,生成建筑设计vr模型,并构建vr设备中手势与建筑设计vr模型优化调整方式的对应关系,利用vr设备对建筑设计vr模型优化调整,并生成优化调整后建筑设计vr模型的平面图以及立面图,实现基于vr技术以及建筑设计草图的低成本建筑设计。
- 还没有人留言评论。精彩留言会获得点赞!