一种用于流场测量的探针测点布局方法、系统及设备
本发明涉及流场测量,特别是涉及一种用于流场测量的探针测点布局方法、系统及设备。
背景技术:
1、在高精度的空气动力学测量中,五孔探针是一种常用的工具。五孔探针设计用于测量流场中的三维速度矢量和静压,通常用在风洞实验和航空器的气动测试中。五孔探针的“五孔”指的是其头部一前四侧的五个压力孔。前端孔通常用作动压孔,提供总压力的读数,而四个侧孔位置在探针前端的周围,它们测量的压力差可以用来确定气流的方向。通过这些压力差,可以计算得到三个正交坐标方向上的速度分量,即纵向、横向和垂向速度分量。五孔探针在气动测量领域的应用背景非常广泛,例如,在航空航天领域,五孔探针的数据被用来优化设计飞行器的气动形状;在能源行业,五孔探针可以增强对燃烧室内流动的理解。相较于其他类型的流速测量工具,如单孔皮托管或三孔探针等,五孔探针可以提供更全面的流场信息。它们能够在气流不是完全对准探针轴线时仍然准确地进行测量,这是在处理复杂三维和旋转流动时非常重要的。
2、在复杂流动中,强烈的旋涡湍流和强激波导致气流速度密度剧烈变化等特性对探针的性能和测量结果的准确性提出了挑战,五孔探针布局的设计对精确捕捉流场结构至关重要。
3、五孔探针通过在特定的测点位置进行点式测量来获取流场的局部参数,这种技术的有效性在很大程度上依赖于测点的精选位置及其分布。传统上,这些测点的位置多是基于经验和预期的流场特性来设置的。然而,由于成本、时间和物理空间的限制,五孔探针的测点数量往往受到限制,且大部分探针的布局趋向于均匀分布。在这种布局下,为了获得完整流场图像,通常采用线性插值的方法来估算那些未设测点之间的流场数据。尽管线性插值在流场较为均匀和参数变化平缓的区域能够提供合理的近似,但在流场迅速变化或含有复杂结构的区域,这种测量和插值手段可能无法有效地捕捉到流动的全部细节。特别是当遇到流场中的速度剧烈变化时,如激波、分离流、旋涡等现象,标准的五孔探针布局及其采用的简单插值方法均有可能错失重要流场信息。由于测点间的较大间隔,未被直接测量到的区域可能存在明显的参数变化,而这些变化在插值过程中则有可能被平滑掉或彻底忽略,导致局部流动的特性和动态被遗漏。这种信息的丢失不仅影响到对当前流场的理解,而且在设计和分析那些对流动细节高度敏感的应用系统时,准确度的降低可能导致性能预测不精确。若流场数据不够精确,性能的评估和优化可能产生误差,影响对流动特性的分析结果。目前针对速度变化剧烈的流场测量技术大部分聚焦于对五孔探针数据进行差值优化的设计上,探针测点布局优化技术相对较少。
技术实现思路
1、本发明的目的是提供一种用于流场测量的探针测点布局方法、系统及设备,通过优化流场测量时的探针测点布局,能够提高流场测量的精度。
2、为实现上述目的,本发明提供了如下方案:
3、一种用于流场测量的探针测点布局方法,包括:
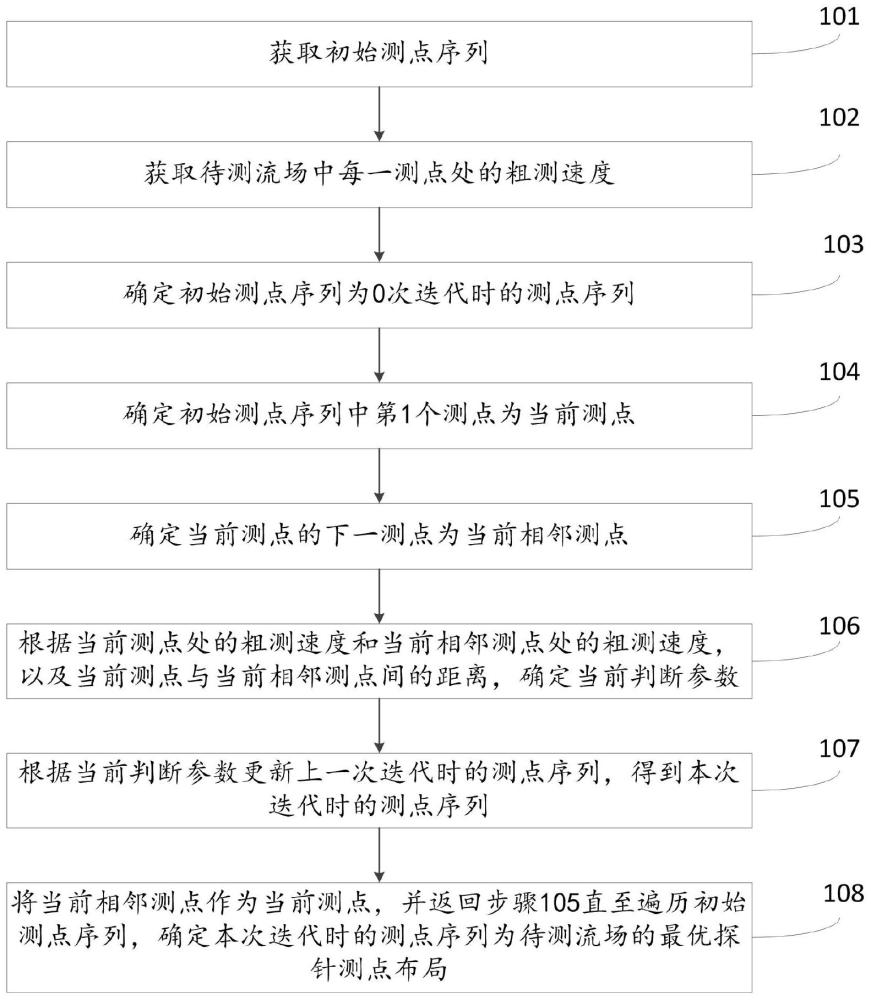
4、获取初始测点序列;所述初始测点序列中多个测点均位于待测流场内;
5、获取待测流场中每一测点处的粗测速度;
6、确定初始测点序列为0次迭代时的测点序列;
7、确定初始测点序列中第1个测点为当前测点;
8、确定当前测点的下一测点为当前相邻测点;
9、根据当前测点处的粗测速度和当前相邻测点处的粗测速度,以及当前测点与当前相邻测点间的距离,确定当前判断参数;
10、根据所述当前判断参数更新上一次迭代时的测点序列,得到本次迭代时的测点序列;
11、将当前相邻测点作为当前测点,并返回步骤“确定当前测点的下一测点为当前相邻测点”直至遍历初始测点序列,确定本次迭代时的测点序列为待测流场的最优探针测点布局。
12、可选的,在确定本次迭代时的测点序列为待测流场的最优探针测点布局之后,还包括:
13、确定最优探针测点布局中每个优化测点处的细测速度;所述优化测点为最优探针测点布局中的元素;
14、根据待测流场中所有优化测点处的细测速度,确定待测流场的流程图像。
15、可选的,所述粗测速度是利用三孔探针进行测量得到的;
16、所述细测速度是利用五孔探针进行测量得到的。
17、可选的,根据当前测点处的粗测速度和当前相邻测点处的粗测速度,以及当前测点与当前相邻测点间的距离,确定当前判断参数,包括:
18、确定当前相邻测点处的粗测速度与当前测点处的粗测速度差值的绝对值为速度一阶差分;
19、确定当前测点与当前相邻测点间的距离为当前间隔距离;
20、判断当前间隔距离是否小于距离阈值,得到第一判断结果;
21、若所述第一判断结果为是,则确定速度一阶差分为待定判断参数;
22、若所述第一判断结果为否,则确定速度一阶差分与当前间隔距离的比值为待定判断参数。
23、可选的,在确定速度一阶差分与当前间隔距离的比值为待定判断参数之后,还包括:
24、利用反正切函数对待定判断参数进行归一化处理,得到当前判断参数。
25、可选的,根据所述当前判断参数更新上一次迭代时的测点序列,得到本次迭代时的测点序列,包括:
26、判断当前判断参数是否小于判断参数下限,得到第二判断结果;
27、若所述第二判断结果为是,则删除当前测点,得到本次迭代时的测点序列;
28、若所述第二判断结果为否,判断当前判断参数是否小于第一判断参数上限,得到第三判断结果;
29、若所述第三判断结果为是,则确定上一次迭代时的测点序列为本次迭代时的测点序列;
30、若所述第三判断结果为否,则确定当前测点与当前相邻测点的间隔为当前间隔;
31、在当前间隔内进行测点插值处理,得到本次迭代时的测点序列。
32、可选的,在当前间隔内进行测点插值处理,包括:
33、获取第二判断参数上限和最小测量间距;所述最小测量间距是根据速度测量设备的尺寸确定的;
34、确定所述第二判断参数上限和所述当前间隔距离之积为中间量;
35、确定中间量与当前判断参数比值的绝对值为待定理论间距;
36、判断待定理论间距是否小于最小测量间距,得到第四判断结果;
37、若所述第四判断结果为是,则确定最小测量间距为理论间距;
38、若所述第四判断结果为否,则确定待定理论间距为理论间距;
39、对所述当前间隔距离与所述理论间距的比值进行向上取整处理,得到等分数;
40、根据等分数对当前间隔进行等分处理,并在每个等分点处添加测点。
41、一种用于流场测量的探针测点布局系统,包括:
42、初始测点序列获取模块,用于获取初始测点序列;所述初始测点序列中多个测点均位于待测流场内;
43、粗测速度确定模块,用于获取待测流场中每一测点处的粗测速度;
44、迭代初始化模块,用于确定初始测点序列为0次迭代时的测点序列;
45、当前测点确定模块,用于确定初始测点序列中第1个测点为当前测点;
46、当前相邻测点模块,用于确定当前测点的下一测点为当前相邻测点;
47、当前判断参数模块,用于根据当前测点处的粗测速度和当前相邻测点处的粗测速度,以及当前测点与当前相邻测点间的距离,确定当前判断参数;
48、测点序列更新模块,用于根据所述当前判断参数更新上一次迭代时的测点序列,得到本次迭代时的测点序列;
49、最优探针测点布局模块,用于将当前相邻测点作为当前测点,并返回步骤“确定当前测点的下一测点为当前相邻测点”直至遍历初始测点序列,确定本次迭代时的测点序列为待测流场的最优探针测点布局。
50、一种电子设备,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行所述的一种用于流场测量的探针测点布局方法。
51、可选的,所述存储器为可读存储介质。
52、根据本发明提供的具体实施例,本发明公开了以下技术效果:
53、本发明提供的一种用于流场测量的探针测点布局方法、系统及设备,基于在速度变化剧烈的流动中初步布置三孔探针获得的流动速度信息,针对五孔探针测点进行加密或删减的布局调整,从而更准确并高效的获得流场信息和流动特性;这一策略涉及对初始流场测量结果的分析和处理评估,对流场速度变化正常的区域进行测点密度保持,对流场速度变化缓慢的区域进行测点删除处理,对流场中速度变化剧烈的关键区域额外布置测点,同时公开了增加测点的方法;随后,在这些关键区域补充放置更多测点,执行精细化的二次测量;打破了现有布置测点时均匀布局或按照经验布局的局限,节省了资源和成本,避免了在整个流场范围内盲目增加测点的成本和处理数据的复杂性;不仅提高了测量效率和准确性,确保重要的流动信息不会因为测点布置的局限性而遗失而且对于那些设计敏感度特别高的系统和应用场景,如精密工程和环形叶珊通道内吸力面高速区域,具有重大的实际意义。
- 还没有人留言评论。精彩留言会获得点赞!