一种工业图像基准校正方法、系统、电子设备与存储介质
本发明涉及图像校正,特别涉及一种工业图像基准校正方法、系统、电子设备与存储介质。
背景技术:
1、在工业场景中,通过图像或机器视觉的方式获取和分析目标物体的特征与信息已经成为一种高效且低成本的方法,在各种场景下都有着广泛的应用。然而,在确定目标物体实际方向或位姿时,首先都需要确定图像中目标物体的基准,才能进一步进行分析。但受限于实际图像获取过程中的设备误差、随机误差等不可控因素,即使拍摄前对被测装置进行了相关物理校准,实际获取的图像仍会存在测量基准的偏差,进而导致图像的进一步分析与处理结果的偏差或错误。
2、而在图像处理中,图像的旋转校正是基于对关键特征进行识别,并通过投影法、霍夫变换法等方式,计算目标物体在图像中的偏转角度与方向,因而可以通过获取的角度对图像进行旋转校正。但工业应用中,由于图像采用像素点的形式存储数据,因此对目标物体边缘阈值处理与识别过程中,即使完全相同的图像也会存在不同的结果,这一变化会直接导致使用上述算法计算的校正角度存在波动,从而导致基准偏差或错误。
3、现有技术方案中,没有针对工业目标物体特征处理导致计算角度波动这一问题的解决方案。当前的方法,都是对于图像旋转校正的算法,在确定边缘或特征后,检测图像的倾斜方向及倾斜角度。无法解决校正角度计算稳定性问题,虽然根据不同的特征计算角度,如直线检测(白盒)、加权最小值(白盒)、极小角点(白盒)、神经网络(黑盒)等方法,这些方法都依赖于被选定特征(白盒)/标签(黑盒)的准确性。上述白盒方法的特征在边缘处依赖于二值化结果,阈值改变,结果就可能发生变化;黑盒方法的特征依赖于图像标注角度结果,标注数据同样依赖于对特征边缘标注的准确性。因而在特征准确时,校正结果正确,但在特征不准确时,就可能产生显著的误差。
4、当前图像旋转校正方法虽然能够计算出一个旋转校正的角度,但缺少对所得角度准确性与稳定性控制。众所周知,图像边缘特征在像素图中非0°、90°时会存在锯齿,虽然现有抗锯齿技术使得锯齿在显示时人眼观察并不明显,但在机器视觉中,这些边缘非常明确并且会直接影响特征的检测与识别,这一现象在所有工业相机拍摄的图像中都存在。而现有图像旋转校正技术是依据图像的特征来实现的,具体的算法流程是首先将图像进行灰度化、二值化操作,再对图像进行特征检测,可以是边缘轮廓、直线、或是图像角点等其它特征检测的一种或几种,根据检测出其对应的特征,再计算矩阵旋转角度,最后利用仿射变换实现图像的矫正。但无论具体采用直线检测或是边缘识别等特征识别方法,均会显著受该特征影响,特征是否准确,则是影响最终校正结果的关键因素。这在图片初始处理阶段稍有变化,就会使得最终特征检测结果发生明显改变,导致计算所得旋转角度的精度与稳定性均无法满足实际工业需求。
技术实现思路
1、本发明的目的在于针对上述现有技术的不足,提供一种工业图像基准校正方法、系统、电子设备与存储介质,以解决现有技术中图片初始处理阶段稍有变化,就会使得最终特征检测结果发生明显改变,导致计算所得旋转角度的精度与稳定性均无法满足实际工业需求的问题。
2、本发明具体提供如下技术方案:一种工业图像基准校正方法,包括如下步骤:
3、获取工业图像;
4、对获取的工业图像进行二值化处理,并通过多种阈值分割算法分割二值化算法,获得不同的阈值区间以及二值化图像;
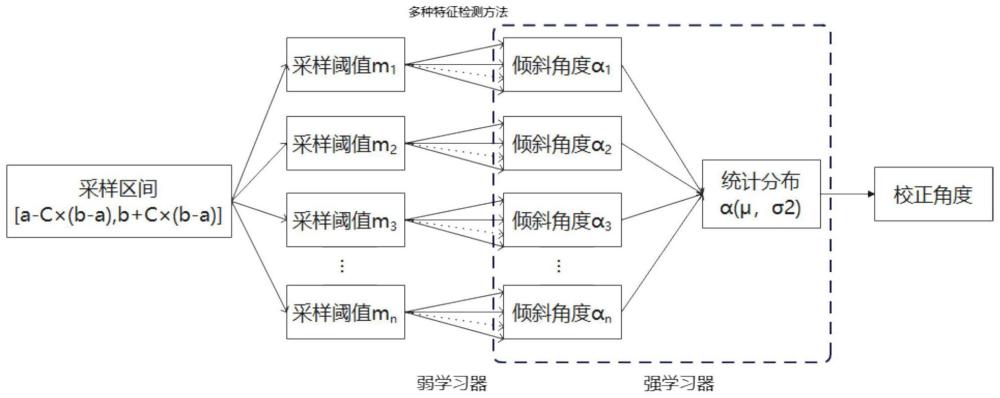
5、根据所述阈值区间[a,b],确定阈值采样范围为[a-c×(b-a),b+c×(b-a)];
6、采用随机采样或均匀采样方法在阈值采样范围内获取n个阈值数据,并处理得到相应阈值下的二值化图像;
7、对获取到的所有二值化图像,采用特征检测方法计算偏转校正角度值;
8、计算所有所述偏转校正角度值的分布(μ,σ2),并将所有偏转校正角度值中与期望μ差值最小的值或将期望μ作为实际校正角度;
9、使用所述实际校正角度对初始获取的工业图像进行旋转校正,获得校正后的图像。
10、优选的,所述对获取的图像进行二值化处理,并通过多种阈值分割算法分割二值化算法,包括但不限于otsu算法、niblack算法、sauvola算法。
11、优选的,根据所述阈值区间[a,b],确定阈值采样范围为[a-c×(b-a),b+c×(b-a)],其中a、b分别为对应算法计算的阈值中的最小值和最大值,其中c为区间扩充系数,为常数。
12、优选的,所述n个阈值数据中n为采样数量,将n值大于100稳定后续统计分布。
13、优选的,所述采用特征检测方法计算偏转校正角度值,包括如下步骤:
14、采用直线检测、加权最小值、极小角点、神经网络,且并不限于上述方法中的一种或几种,对同一张图构建第一学习器。
15、优选的,所述并不限于上述方法中的一种或几种,对同一张图构建第一学习器,包括如下步骤:
16、若选择一种方法时,直接构建第一学习器;
17、若选择多种方法时,采用bagging、boosting和stacking的集成学习方式构建第一学习器;
18、通过相应的所述第一学习器得到每张图对应的偏转校正角度。
19、优选的,获取所述实际校正角度时,或通过构建第二学习器进行偏转校正角度直接输出,包括如下步骤:
20、采用bagging、boosting和stacking的集成学习方式将所述第一学习器结果集成为一个第二学习器;
21、通过所述第二学习器直接输出偏转校正角度;
22、其中,所述第二学习器学习效果强于第一学习器。
23、优选的,本发明还包括一种工业图像基准校正系统,包括:
24、采集模块,用于获取工业图像;
25、二值化处理模块,用于对获取的工业图像进行二值化处理,并通过多种阈值分割算法分割二值化算法,获得不同的阈值区间以及二值化图像;
26、区间获取模块,用于根据所述阈值区间[a,b],确定阈值采样范围为[a-c×(b-a),b+c×(b-a)];
27、采样模块,用于采用随机采样或均匀采样方法在阈值采样范围内获取n个阈值数据,并处理得到相应阈值下的二值化图像;
28、偏转校正计算模块,用于对获取到的所有二值化图像,采用特征检测方法计算偏转校正角度值;
29、实际校正角度模块,用于计算所有所述偏转校正角度值的分布(μ,σ2),并将所有偏转校正角度值中与期望μ差值最小的值或将期望μ作为实际校正角度;
30、旋转校正模块,用于使用所述实际校正角度对初始获取的工业图像进行旋转校正,获得校正后的图像。
31、优选的,本发明提供一种电子设备,包括存储器及处理器,所述存储器中储存有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行所述一种工业图像基准校正方法的步骤。
32、优选的,本发明提供一种存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现所述的一种工业图像基准校正方法。
33、与现有技术相比,本发明具有如下显著优点:
34、本发明针对不同图像处理与特征识别参数变化导致的旋转角度值变化误差,采用bagging算法思想,通过随机生成的方法确定一定数量的特征识别阈值参数对图像进行处理,然后采用一种或多种方法求出对应参数下的旋转校正角度,最后采用集成方法获得准确且稳定的旋转校正角度。本发明的优点在于通过集成学习的方法,充分利用了对象特征的全部数据,通过对图像中占比更多的主体数据信息的利用,降低了传统方法中通过边缘信息进行校正的随机扰动,使得最终结果更加稳定和准确。
- 还没有人留言评论。精彩留言会获得点赞!