电动助力转向系统的诊断方法、装置、设备及存储介质与流程
本发明涉及汽车诊断领域,尤其涉及一种电动助力转向系统的诊断方法、装置、设备及存储介质。
背景技术:
1、目前,电动助力转向系统在汽车行业中得到广泛应用。随着电动汽车的兴起和消费者对安全性能的要求提高,电动助力转向系统作为一种先进的技术被广泛采用。它通过电机和传感器的配合,为驾驶员提供了更轻便、精准的操控方式。针对电动助力转向系统的诊断方法成为关键技术之一。在诊断过程中,通过监测和分析电动助力转向系统的各个关键参数,可以实时检测和判断系统是否存在异常。当系统出现故障时,诊断方法能够迅速定位问题,并提供相应的修复方案。现有的诊断方式往往使用故障码诊断,故障码诊断是一种常见的诊断方法,它通过读取系统中的故障码信息来判断系统是否存在故障。然而,仅依靠故障码信息往往无法准确地定位故障的具体元器件,且对于隐性故障的诊断效果有限。
技术实现思路
1、本发明的主要目的在于解决现有的电动助力转向系统的诊断方法无法准确地定位故障的具体元器件的技术问题。
2、本发明第一方面提供了一种电动助力转向系统的诊断方法,所述电动助力转向系统的诊断方法包括:
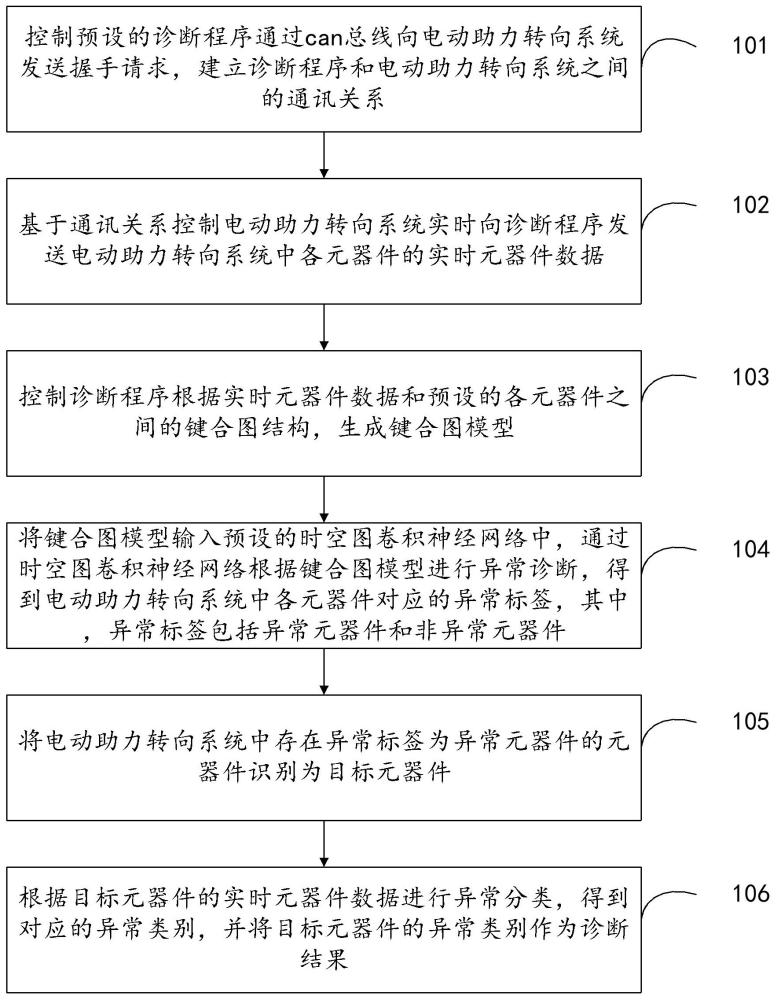
3、控制预设的诊断程序通过can总线向电动助力转向系统发送握手请求,建立所述诊断程序和所述电动助力转向系统之间的通讯关系;
4、基于所述通讯关系控制所述电动助力转向系统实时向所述诊断程序发送所述电动助力转向系统中各元器件的实时元器件数据;
5、控制所述诊断程序根据所述实时元器件数据和预设的所述各元器件之间的键合图模型,生成键合图模型;
6、将所述键合图模型输入预设的时空图卷积神经网络中,通过所述时空图卷积神经网络根据所述键合图模型进行异常诊断,得到所述电动助力转向系统中各元器件对应的异常标签,其中,所述异常标签包括异常元器件和非异常元器件;
7、将所述电动助力转向系统中存在异常标签为异常元器件的元器件识别为目标元器件;
8、根据所述目标元器件的实时元器件数据进行异常分类,得到对应的异常类别,并将所述目标元器件的异常类别作为诊断结果。
9、可选的,在本发明第一方面的第一种实现方式中,所述控制预设的诊断程序通过can总线向电动助力转向系统发送握手请求,建立所述诊断程序和所述电动助力转向系统之间的通讯关系包括:
10、控制预设的诊断程序通过can总线向电动助力转向系统发送握手请求,其中,所述握手请求包括所述诊断程序的第一身份信息;
11、当所述电动助力转向系统接收到所述握手请求时,控制所述电动助力转向系统根据预设的通信协议生成回复消息,其中所述回复消息包括所述第一身份信息和所述电动助力转向系统的第二身份信息;
12、当所述诊断程序接收到所述回复消息时,建立所述诊断程序和所述电动助力转向系统之间的通讯关系。
13、可选的,在本发明第一方面的第二种实现方式中,所述基于所述通讯关系控制所述电动助力转向系统实时向所述诊断程序发送所述电动助力转向系统中各元器件的实时元器件数据包括:
14、控制所述电动助力转向系统实时获取各元器件的实时元器件数据,并基于所述通讯关系将所述实时元器件数据转换为多帧数据信息;
15、在所述多帧数据信息中的当前帧数据信息发送时,判断所述can总线是否空闲;
16、若空闲,则将所述当前帧数据信息通过所述can总线发送至所述诊断程序;
17、若不空闲,则控制所述电动助力转向系统进行正常转向工作,直至所述can总线空闲,将所述当前帧数据信息通过所述can总线发送至所述诊断程序,并返回至所述在所述多帧数据信息中的当前帧数据信息发送时,判断所述can总线是否空闲的步骤,直至所述多帧数据信息全部发送至所述诊断程序;
18、控制所述诊断程序基于所述通讯关系将所述多帧数据信息转换为实时元器件数据。
19、可选的,在本发明第一方面的第三种实现方式中,所述控制所述诊断程序根据所述实时元器件数据和预设的所述各元器件之间的键合图模型,生成键合图模型之前,还包括:
20、对所述电动助力转向系统进行系统划分,得到多个子系统,并确定各子系统对应的元器件;
21、确定各子系统中的各元器件之间的物理功率流动关系,并根据所述物理功率流动关系生成对应的子键合图;
22、将各子系统对应的子键合图进行耦合处理,得到所述各元器件之间的键合图模型。
23、可选的,在本发明第一方面的第四种实现方式中,所述将所述键合图模型输入预设的时空图卷积神经网络中,通过所述时空图卷积神经网络根据所述键合图模型进行异常诊断,得到所述电动助力转向系统中各元器件对应的异常标签包括:
24、对所述键合图模型进行预处理,并根据预处理后的键合图模型计算各元器件对应的邻接矩阵;
25、将所述键合图模型输入预设的时空图卷积神经网络中,其中所述时空图卷积神经网络包括特征提取部分和异常诊断部分;
26、通过所述特征提取部分提取各元器件对应的邻接矩阵进行空间特征提取,得到空间特征信息,并对各元器件对应的实时元器件数据进行特征提取,得到多个数据特征信息;
27、将所述空间特征信息输入异常诊断部分的门控循环单元中,得到输出结果,并通过预设的注意力机制计算所述多个数据特征信息对应的注意力权重向量;
28、根据所述注意力权重向量对多个数据特征信息和所述输出结果进行加权融合,得到融合特征向量,并将融合特征向量输入至分类层,得到所述电动助力转向系统中各元器件对应的异常标签。
29、可选的,在本发明第一方面的第五种实现方式中,所述根据所述注意力权重向量对多个数据特征信息和所述输出结果进行加权融合,得到融合特征向量,并将融合特征向量输入至分类层,得到所述电动助力转向系统中各元器件对应的异常标签包括:
30、通过所述分类层将所述融合特征向量线性变换映射至高维特征空间,得到线性变换结果;
31、通过预设的激活函数对所述线性变换结果进行非线性变换,得到非线性变换结果;
32、通过所述分类层中的全连接层根据所述非线性变换结果计算各元器件对应各异常标签的概率,并将概率最高的异常标签作为对应的元器件的异常标签。
33、可选的,在本发明第一方面的第六种实现方式中,所述异常类别包括触发元器件和故障元器件;
34、所述根据所述目标元器件的实时元器件数据进行异常分类,得到对应的异常类别,并将所述目标元器件的异常类别作为诊断结果包括:
35、根据所述实时元器件数据中的元器件位置确定各元器件之间的实际距离;
36、根据所述实际距离确定目标元器件对应的邻近元器件,并将各目标元器件以及对应的邻近元器件的实时元器件数据进行时间窗划分,得到多个时间序列数据;
37、根据预设的相关性算法,计算所述目标元器件的时间序列数据与对应的邻近元器件的时间序列数据之间的数据相关性;
38、对所述数据相关性进行数据相关特征提取,得到相关性特征,并根据所述相关性特征确定各所述目标元器件之间是否存在相关关系;
39、将存在相关关系的目标元器件识别为触发元器件,并将不存在相关关系的目标元器件识别为故障元器件,将所述目标元器件的异常类别作为诊断结果。
40、本发明第二方面提供了一种电动助力转向系统的诊断装置,所述电动助力转向系统的诊断装置包括:
41、通讯建立模块,用于控制预设的诊断程序通过can总线向电动助力转向系统发送握手请求,建立所述诊断程序和所述电动助力转向系统之间的通讯关系;
42、通讯交互模块,用于基于所述通讯关系控制所述电动助力转向系统实时向所述诊断程序发送所述电动助力转向系统中各元器件的实时元器件数据;
43、键合图生成模块,用于控制所述诊断程序根据所述实时元器件数据和预设的所述各元器件之间的键合图模型,生成键合图模型;
44、异常诊断模块,用于将所述键合图模型输入预设的时空图卷积神经网络中,通过所述时空图卷积神经网络根据所述键合图模型进行异常诊断,得到所述电动助力转向系统中各元器件对应的异常标签,其中,所述异常标签包括异常元器件和非异常元器件;
45、识别模块,用于将所述电动助力转向系统中存在异常标签为异常元器件的元器件识别为目标元器件;
46、分类模块,用于根据所述目标元器件的实时元器件数据进行异常分类,得到对应的异常类别,并将所述目标元器件的异常类别作为诊断结果。
47、本发明第三方面提供了一种电动助力转向系统的诊断装置,包括:存储器和至少一个处理器,所述存储器中存储有指令,所述存储器和所述至少一个处理器通过线路互连;所述至少一个处理器调用所述存储器中的所述指令,以使得所述电动助力转向系统的诊断设备执行上述的电动助力转向系统的诊断方法的步骤。
48、本发明的第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有指令,当其在计算机上运行时,使得计算机执行上述的电动助力转向系统的诊断方法的步骤。
49、上述电动助力转向系统的诊断方法、装置、设备及存储介质,通过控制诊断程序通过和电动助力转向系统之间的通讯关系;基于通讯关系获取电动助力转向系统中各元器件的实时元器件数据;控制诊断程序根据实时元器件数据和预设的各元器件之间的键合图模型,生成键合图模型;将键合图模型输入预设的时空图卷积神经网络中,通过时空图卷积神经网络根据键合图模型进行异常诊断,得到电动助力转向系统中各元器件对应的异常标签;并进行异常分类,得到诊断结果。本方法通过建立通讯关系,实时获取电动助力转向系统中各元器件数据,基于键合图模型和时空图卷积神经网络进行异常诊断,能够快速准确地识别和定位元器件故障,提高了系统的可靠性。
50、本发明的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
51、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!