一种基于图像增强的超声图像处理方法与流程
本发明涉及图像的增强,具体涉及一种基于图像增强的超声图像处理方法。
背景技术:
1、超声图像是通过超声波成像技术获取的医学影像,用于帮助医生对人体的各个组织结构进行分析。其中,超声图像在获取的过程中可能会存在由于超声传感器和电子元件的热运动所引起的噪声像素点,即在超声图像中出现杂色点或者斑点,降低超声图像的质量和对比度,导致医生不能对各个组织结构进行准确的分析,因此,需要对超声图像进行增强,去除噪声像素点的干扰。
2、现有方法中通过非局部均值滤波算法对超声图像中的噪声像素点进行去除,但非局部均值滤波算法对于超声图像中的边缘细节的保留度不高,因为非局部均值滤波算法在去噪的过程中容易对边缘过度平滑,进而导致部分边缘细节信息丢失,不能对超声图像进行准确的分析。
技术实现思路
1、为了解决非局部均值滤波算法在去噪的过程中容易对边缘过度平滑,导致部分边缘细节信息丢失,不能对超声图像进行准确分析的技术问题,本发明的目的在于提供一种基于图像增强的超声图像处理方法,所采用的技术方案具体如下:
2、本发明提出了一种基于图像增强的超声图像处理方法,该方法包括以下步骤:
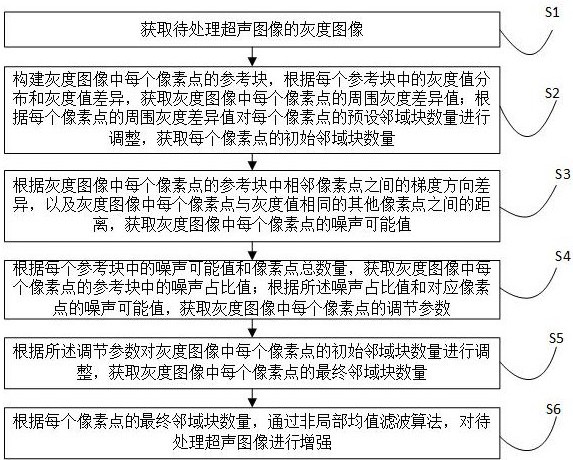
3、获取待处理超声图像的灰度图像;
4、构建灰度图像中每个像素点的参考块,根据每个参考块中的灰度值分布和灰度值差异,获取灰度图像中每个像素点的周围灰度差异值;根据每个像素点的周围灰度差异值对每个像素点的预设邻域块数量进行调整,获取每个像素点的初始邻域块数量;
5、根据灰度图像中每个像素点的参考块中相邻像素点之间的梯度方向差异,以及灰度图像中每个像素点与灰度值相同的其他像素点之间的距离,获取灰度图像中每个像素点的噪声可能值;
6、根据每个参考块中的噪声可能值和像素点总数量,获取灰度图像中每个像素点的参考块中的噪声占比值;根据所述噪声占比值和对应像素点的噪声可能值,获取灰度图像中每个像素点的调节参数;
7、根据所述调节参数对灰度图像中每个像素点的初始邻域块数量进行调整,获取灰度图像中每个像素点的最终邻域块数量;
8、根据每个像素点的最终邻域块数量,通过非局部均值滤波算法,对待处理超声图像进行增强。
9、进一步地,所述构建灰度图像中每个像素点的参考块,根据每个参考块中的灰度值分布和灰度值差异,获取灰度图像中每个像素点的周围灰度差异值的方法为:
10、对于灰度图像中的任一像素点,获取该像素点的参考块中与该像素点的灰度值相同的像素点数量,作为第一数量;
11、获取该像素点的参考块中每个像素点与该像素点之间的灰度值差异,作为第一差异;
12、根据第一数量、第一差异和该像素点的参考块中像素点总数量,获取该像素点的周围灰度差异值。
13、进一步地,所述周围灰度差异值的计算公式为:
14、
15、式中,为灰度图像中第i个像素点的周围灰度差异值;为灰度图像中第i个像素点的参考块中的第一数量;n为参考块的行数;m为参考块的列数;为参考块中像素点总数量;为灰度图像中第i个像素点的灰度值;为灰度图像中第i个像素点的参考块中第j个像素点的灰度值;为绝对值函数;exp为以自然常数e为底数的指数函数;norm为归一化函数。
16、进一步地,所述初始邻域块数量的获取方法为:
17、将每个像素点的周围灰度差异值与预设邻域块数量的乘积,作为每个像素点的第一值;
18、将每个第一值向上取整的结果,作为对应像素点的初始邻域块数量。
19、进一步地,所述根据灰度图像中每个像素点的参考块中相邻像素点之间的梯度方向差异,以及灰度图像中每个像素点与灰度值相同的其他像素点之间的距离,获取灰度图像中每个像素点的噪声可能值的方法为:
20、对于灰度图像中的任一像素点,获取该像素点的参考块中每行中的每个像素点与相邻的下一像素点之间的梯度方向差异,作为方向差异;
21、获取该像素点与灰度图像中灰度值相同的其他每个像素点之间的欧式距离,作为第一距离;
22、将第一距离从小到大进行排列,获得第一距离序列;
23、根据该像素点的参考块中的方向差异和第一距离序列的前预设数量个第一距离,获取该像素点的噪声可能值。
24、进一步地,所述噪声可能值的计算公式为:
25、
26、式中,为灰度图像中第i个像素点的噪声可能值;n为参考块的行数;m为参考块的列数;为灰度图像中第i个像素点的参考块中第l行中的第s个像素点的梯度方向;为灰度图像中第i个像素点的参考块中第l行中的第(s+1)个像素点的梯度方向;w为预设数量;为第z个第一距离;为绝对值函数;norm为归一化函数。
27、进一步地,所述噪声占比值的计算公式为:
28、
29、式中,为灰度图像中第i个像素点的参考块中的噪声占比值;为灰度图像中第i个像素点的参考块中第k个像素点的噪声可能值;n为参考块的行数;m为参考块的列数;为参考块中像素点总数量;为第一预设正整数。
30、进一步地,所述调节参数的获取方法为:
31、将灰度图像中每个像素点的噪声可能值与对应像素点的参考块中的噪声占比值的乘积,作为第一特征值;
32、将每个第一特征值的绝对值进行归一化的结果,作为灰度图像中对应像素点的调节参数。
33、进一步地,所述最终邻域块数量的计算公式为:
34、
35、式中,为灰度图像中第i个像素点的最终邻域块数量;为灰度图像中第i个像素点的初始邻域块数量;为灰度图像中第i个像素点的调节参数;为灰度图像中第i个像素点的参考块中的噪声占比值;为第二预设常数;为向上取整符合。
36、进一步地,所述梯度方向的获取方法为:通过scharr算子,获取灰度图像中每个像素点的梯度方向。
37、本发明具有如下有益效果:
38、构建灰度图像中每个像素点的参考块,便于对灰度图像中的每个像素点进行准确的分析;进而根据每个参考块中的灰度值分布和灰度值差异,获取灰度图像中每个像素点的周围灰度差异值,为确定灰度图像中每个像素点的邻域块数量做准备,因此,根据每个像素点的周围灰度差异值对每个像素点的预设邻域块数量进行调整,获取每个像素点的初始邻域块数量,确保非局部均值滤波算法对噪声像素点进行有效的去噪;引起像素点周围局部灰度值变化的有可能是噪声像素点,也有可能是边缘像素点,因此,存在将边缘像素点误认为噪声像素点的情况,为了保证对噪声像素点进行有效的去除,同时,还准确保留灰度图像中的边缘细节信息,进一步根据灰度图像中每个像素点的参考块中相邻像素点之间的梯度方向差异,以及灰度图像中每个像素点与灰度值相同的其他像素点之间的距离,获取灰度图像中每个像素点的噪声可能值,初步确定灰度图像中每个像素点为噪声像素点的可能性;进而根据每个参考块中的噪声可能值和像素点总数量,获取灰度图像中每个像素点的参考块中的噪声占比值,进一步确定灰度图像中每个像素点为噪声像素点的可能性,因此,根据噪声占比值和对应像素点的噪声可能值,获取灰度图像中每个像素点的调节参数,对灰度图像中每个像素点的初始邻域块数量进行调整,自适应获取灰度图像中每个像素点的最终邻域块数量;保证非局部均值滤波算法对灰度图像中的噪声像素点进行有效去除,同时保留更多的边缘细节信息,从而提高待处理超声图像的显示质量,对待处理超声图像进行更准确的分析。
- 还没有人留言评论。精彩留言会获得点赞!