一种智能汽车匝道汇入类人轨迹生成系统及方法
本发明涉及一种智能汽车轨迹生成方法,特别涉及一种基于生成网络的智能汽车匝道汇入类人轨迹生成系统及方法。
背景技术:
1、随着汽车智能化水平不断提高,配备高等级自动驾驶系统的智能汽车的产销量不断增加。高等级的自动驾驶系统应当具备感知复杂交通态势的能力,并在与周围车的交互中做出正确的行为决策。匝道场景下汇入轨迹规划对智能汽车而言是一项具有挑战性的任务,作为与其他交通参与者具有频繁交互作用的场景,智能汽车匝道汇入轨迹规划必须在保证安全性、跟踪性、舒适性的同时,还要考虑到人类驾驶员的接受程度。为此,智能汽车应拥有与人类相似的换道行为策略,具备与人类类似的换道轨迹。
2、现有的生成类人轨迹的方法主要包括:(1)基于模仿学习的方法,(2)基于模型预测控制的方法,(3)基于博弈论的方法,然而,现有的这些方法仍存在以下问题与不足:
3、方法(1)根据交通车所处环境的当前状态,仿照人类在该状态时的轨迹进行轨迹模仿,进而生成类人轨迹。然而,该方法学习得到的策略在和环境交互过程中不可能完全学成最优,导致所获状态逐渐偏离专家策略的数据分布,产生复合误差,使得所生成的类人轨迹逐渐偏离人类的真实轨迹。
4、方法(2)的轨迹严重依赖于模型预测控制的优化函数,生成具有不同驾驶风格的驾驶人的类人轨迹需要不同的优化函数参数。然而该方法所设置的优化函数参数的调整过程复杂,针对每一条类人轨迹的生成均指定一套不同的优化函数参数并不现实,因此该方法难以生成多样化的轨迹;此外,模型预测控制的计算负荷很高,导致该方法并不适合实时应用。
5、方法(3)基于所建立的博弈收益矩阵求解纳什均衡,进而确定当前车辆的最优动作,在轨迹生成应用层面,动作通常被设置为加速度与车轮转角。然而,由于博弈收益矩阵的动作是离散的,在应用于运动规划这类需要高动作细粒度的连续动作任务时,存在仿真精度低,轨迹平滑性差等一系列问题,使得该方法所生成的类人轨迹的质量不佳。
6、综上所述,如何生成稳定、高质量、多样化、类人性佳的匝道汇入类人轨迹,提高智能汽车匝道汇入轨迹规划的社会接受度与信任度,已成为智能汽车领域的关键技术问题之一。
技术实现思路
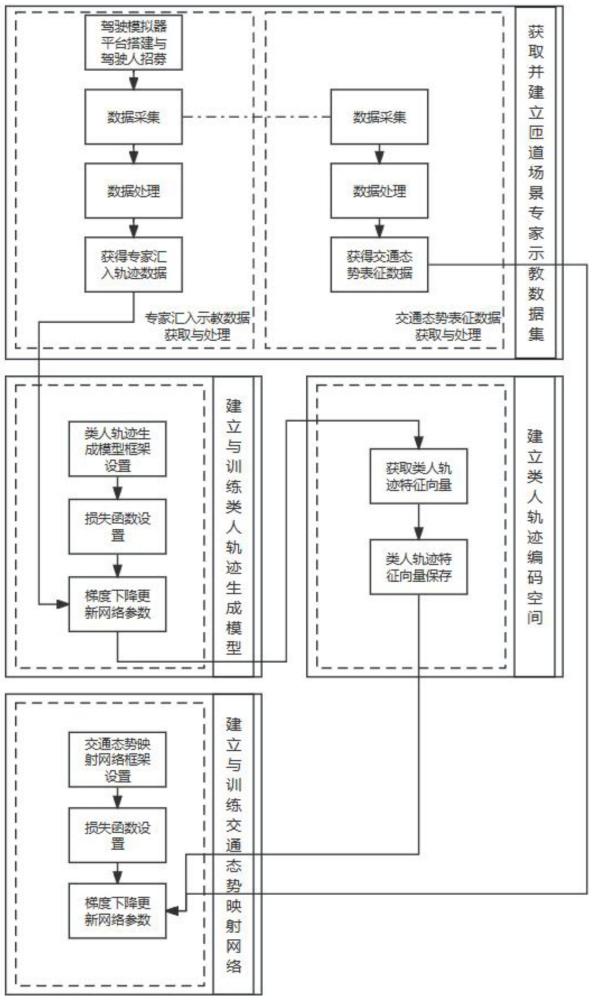
1、为了解决上述技术问题,本发明提供一种基于生成网络的智能汽车匝道汇入类人轨迹生成系统,通过以下步骤建立:
2、步骤一、获取并建立匝道场景专家示教数据集
3、(1.1)专家汇入示教数据获取与处理:
4、采用自动驾驶仿真软件,记录专家汇入过程中匝道合并车道上的汇入车辆ev(egovehicle,简称ev)的绝对速度数据、绝对纵向位置数据、绝对横向位置数据、绝对加速度数据、ev航向角数据及主路上的跟随车辆fv(following vehicle,简称fv)的绝对速度数据、绝对纵向位置数据、绝对横向位置数据、绝对加速度数据、fv航向角数据及ev与fv的相对速度数据、相对纵向位置数据、相对横向位置数据,共计采样n条数据;数据采样频率为0.1s,采样时同时记录所有采样点的现实时刻;
5、专家汇入轨迹数据以ev汇入状态开始的起始点为坐标原点,以ev汇入状态开始的现实时刻为汇入时间的零时刻,以主路车辆行进方向为x轴,以x轴逆时针90度方向为y轴建立局部直角坐标系,记录汇入轨迹在局部直角坐标系下的坐标及各坐标点的汇入时间;
6、对专家汇入轨迹数据中的轨迹进行归一化处理后得到专家汇入轨迹数据格式如下:
7、
8、
9、其中,ζ1代表归一化后的专家汇入轨迹数据的集合,每条轨迹均包括k0个采样点,代表集合中的第i条轨迹,且该轨迹以汇入时间零时刻计算的汇入截止时刻为ti,代表第t个采样点的时刻,代表该时刻车辆的纵坐标,代表该时刻车辆的横坐标;
10、(1.2)交通态势表征数据获取与处理:
11、依据步骤一(1.1)所获得的ev的绝对速度数据、绝对纵向位置数据、绝对横向位置数据、绝对加速度数据、ev航向角数据及fv的绝对速度数据、绝对纵向位置数据、绝对横向位置数据、绝对加速度数据、fv航向角数据及ev与fv的相对速度数据、相对纵向位置数据、相对横向位置数据,以ev汇入发生的起始点的现实时刻为终止时刻t,向前遍历数个采样点,提取时间窗h内的数据,对数据归一化后组成交通态势表征数据rtraffic:
12、rtraffic=[r1,r2,...,rn]
13、ri=[rt-h+0.1,rt-h+0.2,...,rt]
14、
15、其中,rtraffic代表交通态势表征数据的集合,ri代表rtraffic中的第i条轨迹的交通态势表征数据,h为时间窗的长度,代表ri中时刻为th的采样点的数据,代表该时刻ev的绝对纵向位置,代表该时刻ev的绝对横向位置,代表该时刻ev的绝对速度,代表该时刻ev的绝对加速度,代表该时刻ev的航向角,代表该时刻fv的绝对纵向位置,代表该时刻fv的绝对横向位置,代表该时刻fv的绝对速度,代表该时刻fv的绝对加速度,代表该时刻fv的航向角,代表该时刻ev与fv的相对速度,该时刻ev与fv的相对纵向位置,代表该时刻ev与fv的相对横向位置。
16、步骤二、建立与训练类人轨迹生成模型
17、(2.1)类人轨迹生成模型网络框架设置:
18、所述类人轨迹生成模型网络以vae模型网络结构为初始模型,设置训练数据的输入维度为[batch_size,k0,feature_size],其中batch_size为每次输入训练的ζ1中的类人轨迹的轨迹数量,k0为ζ1中轨迹的采样点个数,feature_size为ζ1中轨迹在每个采样时刻点的特征数量;编码器网络结构的输入层大小设置为与训练数据的输入维度匹配,解码器网络结构的输出层大小设置为与训练数据的输入维度匹配。
19、(2.2)损失函数设置:
20、设置的损失函数loss1如下:
21、
22、其中,l1为重构误差,它被设计为ζ1中的轨迹的每个采样点的对应特征与类人轨迹生成模型网络所生成的轨迹的每个采样点的对应特征之间的均方误差(mse);l2为kl散度损失项,它被设计为变分后验分布n(μ,σ2)与标准正态分布n(0,i)间的kl散度,变分后验分布的均值μ及方差σ2通过编码器网络结构给出,并通过重整参数化技巧输出为编码向量。ζ1为归一化后的专家汇入轨迹数据,为类人轨迹生成模型网络所生成的专家汇入轨迹数据,α为调节参数;
23、(2.3)梯度下降更新网络参数:
24、完成上述步骤(2.1)(2.2)后,每次从ζ1中随机抽取batch_size条轨迹作为训练数据,输入所述类人轨迹生成模型网络进行训练,计算损失函数loss1,基于最优adam优化器通过梯度下降更新网络参数,直至网络收敛。
25、步骤三、建立类人轨迹编码空间
26、(3.1)获取类人轨迹特征向量:
27、将上述类人轨迹生成模型网络设置为调试模式,不再计算梯度,随后依次输入ζ1中的轨迹,获取编码器输出的对应输出类人轨迹特征向量;具体的,当输入ζ1中的轨迹为时,记输出的类人轨迹特征向量为χi(其中1≤i≤n),χi的数据维度与编码器的输出层大小匹配;
28、(3.2)类人轨迹特征向量保存:
29、依次将类人轨迹特征向量保存至类人轨迹编码空间χ:
30、χ=[χ1,χ2,χ3,...,χi,...,χn]
31、步骤四、建立与训练交通态势映射网络
32、(4.1)交通态势映射网络框架设置:
33、获取lstm模型网络结构为初始模型,设置交通态势映射网络包含双层lstm结构,输入层大小设置为与ri的维度相匹配,输出层大小设置为与χi的维度相匹配;
34、(4.2)损失函数设置:
35、设置的损失函数loss2为交通态势映射网络输出的类人轨迹特征向量与步骤三中通过类人轨迹生成模型网络获取的类人轨迹编码空间中所对应类人轨迹特征向量的均方误差(mse):
36、
37、其中,为交通态势映射网络输出的类人轨迹特征向量所构成的类人轨迹编码空间,
38、(4.3)梯度下降更新网络参数:
39、完成上述(4.1)(4.2)步后,每次训练随机抽取rtraffic中的ri(其中1≤i≤n)输入所述交通态势映射网络,计算损失函数loss2,基于最优adam优化器通过梯度下降更新网络参数,直至网络收敛,完成交通态势映射网络的建立与训练。
40、进一步的,步骤(1.1)专家汇入示教数据获取与处理过程中,由于驾驶人的操作随机性及人类驾驶员操纵车辆时不可避免的超调误差与修正,所采集的汇入轨迹存在随机波动,采用多项式拟合方法对轨迹进行规则化处理,并对所有轨迹在时间尺度上均匀采样k0个采样点,以使得所采集的轨迹更为平滑且采样点的数量一致。
41、上述处理后的专家汇入轨迹数据的格式如下:
42、
43、
44、其中,ζ0代表专家汇入轨迹数据的集合,每条轨迹均包括k0个采样点,代表ζ0中的第i条轨迹,且该轨迹以汇入时间零时刻计算的汇入截止时刻为ti,代表第t个采样点的时刻,代表该时刻车辆的纵坐标,代表该时刻车辆的横坐标。
45、为了方便后续模型训练,对ζ0中的轨迹进行归一化处理:
46、
47、
48、
49、
50、
51、
52、记归一化后的专家汇入轨迹数据格式如下:
53、
54、由于ζ1中记录的数据与ζ0中记录的数据仅有数值尺度上的不同,因此不再赘述其内部的数据格式。
55、本发明提供的一种智能汽车匝道汇入类人轨迹生成方法,利用上述提供的一种智能汽车匝道汇入类人轨迹生成系统,进一步包括以下步骤:
56、步骤六、真实交通态势表征数据获取与处理:
57、当智能汽车处于匝道汇入场景时,智能汽车利用雷达、高清相机等车载环境感知装置及轮速计、高精定位系统、车轮转角传感器等车载状态监测装置获取ev的绝对速度数据、绝对纵向位置数据、绝对横向位置数据、绝对加速度数据、ev航向角数据及fv的绝对速度数据、绝对纵向位置数据、绝对横向位置数据、绝对加速度数据、fv航向角数据及ev与fv的相对速度数据、相对纵向位置数据、相对横向位置数据,并实时保存最新的时间窗的交通态势表征数据rreal-time于存储介质中;rreal-time与rtraffic中的ri(其中1≤i≤n)具有相同数据格式;
58、步骤七、类人轨迹特征向量获取:
59、当智能汽车的高级决策器决定汇入后,将存储介质中的rreal-time输入交通态势映射网络,交通态势映射网络依据当前交通态势表征数据,生成并输出当前交通态势下所映射的类人轨迹特征向量与χ中的χi(其中1≤i≤n)具有相同数据格式;
60、步骤八、类人轨迹生成:
61、将输入类人轨迹生成模型的解码器,解码器对进行解码,输出当前交通态势下最优的类人汇入轨迹数据。
62、本发明的有益效果:
63、本发明提供的一种智能汽车匝道汇入类人轨迹生成系统及方法创新性地引入生成网络,建立类人轨迹生成模型,利用生成网络的强大的特征提取能力,实现了高质量、类人性佳的类人轨迹生成;通过引入类人轨迹特征向量,建立类人轨迹编码空间,利用长短期记忆网络建立交通态势映射网络,实现了稳定且多样化的类人轨迹生成,生成稳定、高质量、多样化、类人性佳的匝道汇入类人轨迹,提高智能汽车匝道汇入轨迹规划的社会接受度与信任度。
- 还没有人留言评论。精彩留言会获得点赞!