一种水下航行器流噪声仿真计算方法及相关装置
本发明属于水下航行器噪声特性研究,涉及一种水下航行器流噪声仿真计算方法及相关装置。
背景技术:
1、水下航行器在航行过程中会产生多种噪声,总体可分为自噪声与辐射噪声。自噪声指水下航行器噪声中传递到换能器的噪声,包括电噪声、磁泄露噪声、结构振动噪声、流噪声和热噪声等噪声。自噪声过大,会降低探测系统灵敏度,减小探测作用距离,甚至导致探测系统错误动作。声纳平台区自噪声降低5db,声纳的探测距离可增加60%,探测目标的海区面积为原面积的3倍。辐射噪声指水下航行器噪声中辐射到周围水环境的噪声,比如螺旋桨转动产生的噪声。辐射噪声直接关系到水下航行器的隐身性,辐射噪声过大,会暴露水下航行器的位置。辐射噪声降低5db,无人水中兵器的命中率约提高25%。当水下航行器高速航行时,螺旋桨的直接辐射噪声、脉动压力产生的流噪声及壳体表面湍流脉动压力激励壳体引起壳体振动的流激噪声是主要的噪声源,因此水下航行器的水动力噪声也成为水下航行器噪声的重点研究方向。水动力噪声是由流噪声和流激噪声共同组成,其中流噪声是湍流边界层内的扰动及水下航行器自导头段表面上的脉动压力引起的噪声。水下航行器在航行过程中,周边湍流边界层内的扰动、壁面上的脉动压力会产生流噪声。湍流边界层内的速度扰动相当于四极子声源,壁面脉动压力相当于偶极子声源,因为在低马赫数的情况下,四极子产生的噪声很小,可以忽略不计,所以壁面上的脉动压力形成的偶极子声源是流噪声的主要成分。流噪声会影响水下航行器的探测能力与隐身性两大重要性能指标。因此,仿真求解水下航行器流噪声具有重要的工程意义。
2、现有技术中,目前市面上的cfd软件多使用有限体积法进行流体计算,而声场分析等多使用有限元法进行计算,当面对多物理场耦合问题时,往往需要多个软件联合仿真,操作较为繁琐。
技术实现思路
1、本发明的目的在于提供一种水下航行器流噪声仿真计算方法及相关装置,以解决目前市面上的cfd软件多使用有限体积法进行流体计算,而声场分析等多使用有限元法进行计算,当面对多物理场耦合问题时,往往需要多个软件联合仿真,操作较为繁琐的问题。
2、为实现上述目的,本发明采用以下技术方案:
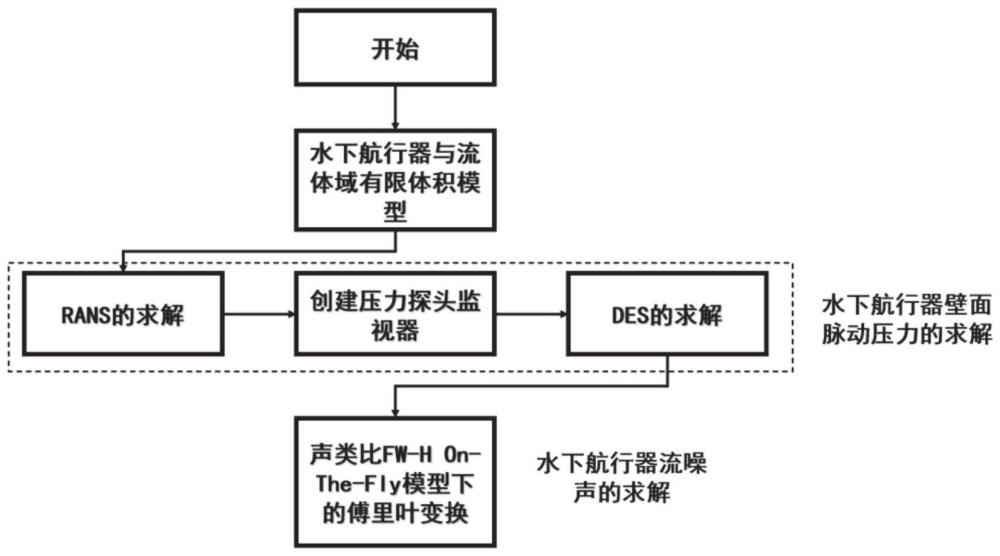
3、第一方面,本发明提供一种水下航行器流噪声仿真计算方法,包括:
4、建立水下航行器和流体域的三维模型,得到水下航行器和流体域的有限体积模型;
5、根据水下航行器和流体域的有限体积模型对纳维-斯托克斯方程求解得到雷诺时均方程解rans解;
6、根据水下航行器和流体域的有限体积模型,创建需要监视流噪声的压力探头监视器;
7、根据水下航行器和流体域的有限体积模型和rans解,进行分离涡模拟求解,得到分离涡模型des解;
8、根据水下航行器和流体域的有限体积模型、压力探头监视器和des解,对des瞬态解进行傅里叶变换,得到每个压力探头监视器处在频域上的压力响应,根据选择的声类比中的飞行中fw-h on-the-fly模型计算得到每个压力探头监视器处的流噪声频谱图。
9、可选的,建立水下航行器和流体域的三维模型,具体过程为:
10、根据流体域流体实际工况赋予流体的材料属性,对三维模型进行网格划分,得到水下航行器和流体域的有限体积模型。
11、可选的,根据水下航行器和流体域的有限体积模型对纳维-斯托克斯方程求解时,考虑涡量不为0、对纳维-斯托克斯方程中的物理量进行时间平均情况下的雷诺平均纳维-斯托克斯方程求解,得到rans解。
12、可选的,rans求解,具体过程为:
13、选择rans湍流模型,设置rans求解的边界条件,对有限元模型进行稳态分析,得到rans解:
14、选择rans湍流模型进行计算,常用的湍流模型包括标准k-ε模型、realizable k-ε模型、k-ω模型和sst模型;
15、其次,设置rans求解的边界条件,边界条件如下:
16、(a)设置入口的法向流入速度为流体流速,或根据工程实际需要设置为其他速度场;
17、(b)设置出口的静压为0;
18、(c)水下航行器的壁面设置为无滑移壁,流体域的壁面设置为滑移壁;
19、接着,对有限体积模型进行稳态分析,得到rans解;
20、最后,对rans解进行后处理,绘制rans解的速度云图和壁面压力分布图。
21、可选的,创建需要监视流噪声的压力探头监视器,具体过程为:
22、设置探头点的三维坐标。
23、可选的,des求解,具体过程为:
24、设置des求解的边界条件,使用rans解作为des求解的初始值,对有限体积模型进行瞬态分析,得到des解:
25、首先,设置des求解的边界条件,des求解的边界条件与rans求解的边界条件相同;
26、其次,设置des求解的初始值,使用rans解作为des解的初始值;
27、然后,对模型进行瞬态分析,设置瞬态求解器的时间步长、最大内部迭代数、最大求解时间求解器参数;
28、最后,对des解进行后处理,绘制des解的速度云图和壁面压力分布图。
29、可选的,在声类比fw-h on-the-fly模型下傅里叶变换,具体过程为:
30、设置fw-h非稳态求解器属性,点时间傅里叶变换的开始时间、截断时间、重叠因数、振幅函数和窗口函数,得到流噪声的频谱图。
31、第二方面,本发明提供一种水下航行器流噪声仿真计算系统,包括:
32、模型建立模块,用于建立水下航行器和流体域的三维模型,得到水下航行器和流体域的有限体积模型;
33、rans解求解模块,用于根据水下航行器和流体域的有限体积模型对纳维-斯托克斯方程求解得到rans解;
34、监视器创建模块,用于根据水下航行器和流体域的有限体积模型,创建需要监视流噪声的压力探头监视器;
35、des解求解模块,用于根据水下航行器和流体域的有限体积模型和rans解,进行分离涡模拟求解,得到des解;
36、流噪声频谱图获取模块,用于根据水下航行器和流体域的有限体积模型、压力探头监视器和des解,对des瞬态解进行傅里叶变换,得到每个压力探头监视器处在频域上的压力响应,根据选择的声类比中的fw-h on-the-fly模型计算得到每个压力探头监视器处的流噪声频谱图。
37、第三方面,本发明提供一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现一种水下航行器流噪声仿真计算方法的步骤。
38、第四方面,本发明提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现一种水下航行器流噪声仿真计算方法的步骤。
39、与现有技术相比,本发明有以下技术效果:
40、本发明提出了一种水下航行器流噪声仿真计算方法,在流场的cfd计算和声场计算中均使用有限体积法进行仿真。通过des求解流体作用在水下航行器壁面的瞬态脉动压力,通过傅里叶变换将时域的脉动压力激励转换到频域上,求解水下航行器在该脉动压力激励下的流噪声,从而实现流场与声场的耦合分析。本方法更易于流场与声场的声流耦合计算,也更利于多物理场耦合仿真,避免了使用多个仿真软件进行联合仿真,提高了仿真的效率。
41、本发明在求解过程中都运用有限体积法进行求解,对于水下航行器等流场、声场多物理量耦合的情况仿真效率更高,避免了使用多个仿真软件联合仿真的繁琐。在流场计算中,相比于全湍流流域采用大涡模拟(large eddy simulation,下文中简称为les)求解,采用将湍流流域划分为不同区域的des瞬态的求解方法,大幅缩短求解时间,并且通过先计算rans解,将rans解作为des解的初始值,减小了des求解的计算成本。
- 还没有人留言评论。精彩留言会获得点赞!