障碍点的检测方法、设备及存储介质与流程
本技术实施例涉及数据处理,具体涉及一种障碍点的检测方法、设备及计算机可读存储介质。
背景技术:
1、在机器人、自动驾驶等行业中,需要实时检测移动设备行进路径中是否存在障碍物,检测到其行进路径中存在障碍物后,需要及时做出避让等响应动作以实现避障,若无法及时、准确地检测到障碍物以进行避障,则会引发事故。
2、对于一些低矮障碍物,由于其高度相较于移动设备的高度较小,若低矮障碍物位于移动设备中用于检测障碍物的传感器(即主要传感器)的检测盲区内,会出现无法及时、有效地检测到障碍物的现象。因此,目前缺少一种有效检测低矮障碍物的方法。
技术实现思路
1、鉴于上述问题,本技术实施例提供了一种障碍点的检测方法、装置、设备和存储介质,用于解决现有技术中存在的无法有效地检测移动设备行进路径中的低矮障碍物的问题。
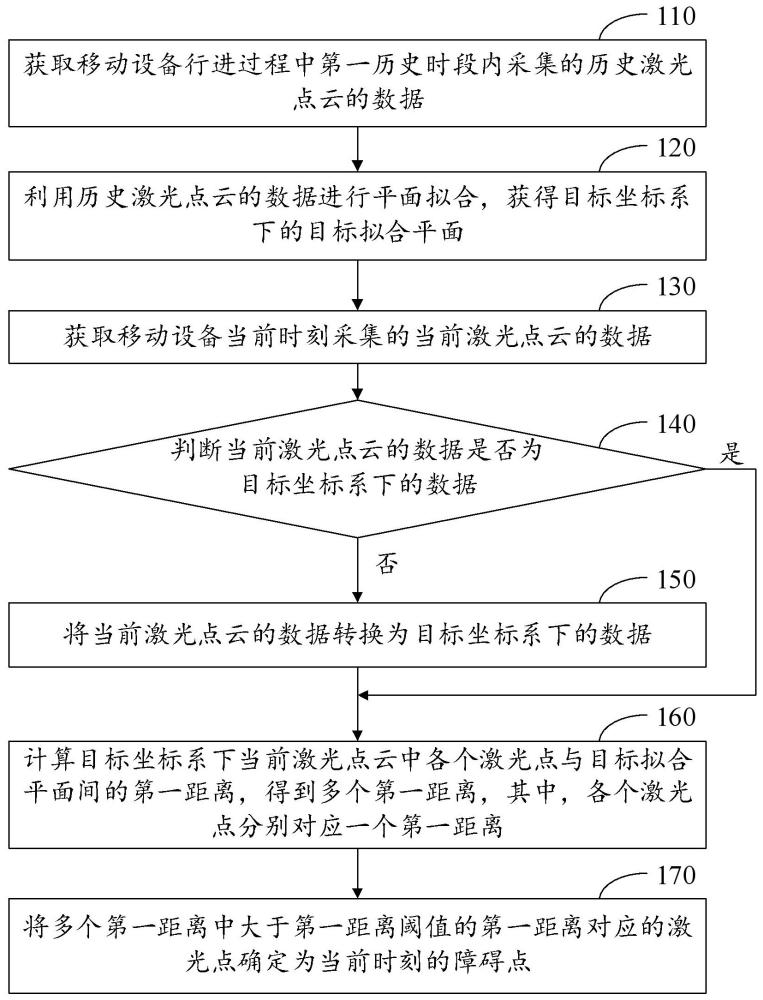
2、根据本技术实施例的一个方面,提供了一种障碍点的检测方法,所述方法用于检测移动设备行进路径中的障碍点,所述方法包括:获取所述移动设备行进过程中第一历史时段内采集的历史点云的数据;利用所述历史点云的数据进行平面拟合,获得目标坐标系下的目标拟合平面;获取所述移动设备当前时刻采集的当前点云的数据;若所述当前点云的数据不是所述目标坐标系下的数据,则将所述当前点云的数据转换为所述目标坐标系下的数据;计算所述目标坐标系下当前点云中各个点与所述目标拟合平面间的第一距离,得到多个第一距离,其中,各个点分别对应一个第一距离;将所述多个第一距离中大于第一距离阈值的第一距离对应的点确定为所述当前时刻的障碍点。
3、在一种可选的方式中,所述利用所述历史点云的数据进行平面拟合,获得目标坐标系下的目标拟合平面,包括:利用所述历史点云中的多个点的数据进行平面拟合,获得所述目标坐标系下的拟合平面;计算用于拟合所述拟合平面的多个点中各个点与所述拟合平面间的第二距离,得到多个第二距离,其中,多个点中各个点分别对应一个第二距离;将所述多个第二距离中小于第二距离阈值的第二距离对应的点确定为内点;计算所述内点的数量与用于拟合所述拟合平面的多个点的数量的比值,得到内点率;若所述内点率小于内点率阈值,则:重复执行上述步骤,直至所述内点率大于或等于所述内点率阈值,其中,重复执行上述步骤时,每次进行平面拟合时所利用的多个点的数据不完全相同;或重复执行上述步骤的次数达到次数阈值,并将最大的内点率对应的所述拟合平面确定为所述目标拟合平面;若所述内点率大于或等于所述内点率阈值,则将所述拟合平面确定为所述目标拟合平面。
4、在一种可选的方式中,第n次执行所述利用所述历史点云中的多个点的数据进行平面拟合,获得所述目标坐标系下的拟合平面步骤时,用于平面拟合的多个点的数据为用于第n-1次平面拟合的多个点中的多个内点的数据,其中,n为正整数,且n≥2。
5、在一种可选的方式中,所述历史点云的数据和所述当前点云的数据为通过所述移动设备中的深度传感器获取的数据,所述目标坐标系为以所述移动设备中的目标点作为原点构建的坐标系,其中,所述目标点为不属于所述深度传感器中的点。
6、在一种可选的方式中,所述历史点云的数据为,其中,为深度传感器坐标系下的数据,所述历史点云中各个点对应的所述移动设备的姿态为,其中,所述利用所述历史点云的数据进行平面拟合,获得目标坐标系下的目标拟合平面,包括:利用公式,将转换为所述目标坐标系下的历史点云的数据,其中,为所述目标坐标系下的历史点云的数据,为所述当前时刻所述移动设备的姿态,为所述深度传感器坐标系转换到所述目标坐标系的外参;利用所述目标坐标系下的历史点云的数据进行平面拟合,获得所述目标坐标系下的所述目标拟合平面;所述若所述当前点云的数据不是所述目标坐标系下的数据,则将所述当前点云的数据转换为所述目标坐标系下的数据,包括:若所述当前点云的数据为所述深度传感器坐标系下的数据,则利用公式将所述深度传感器坐标系下的当前点云的数据转换为所述目标坐标系下的数据,其中,为所述目标坐标系下的当前点云的数据,为通过所述深度传感器获得的所述深度传感器坐标系下的当前点云的数据。
7、在一种可选的方式中,所述方法还包括:获取所述移动设备行进过程中第二历史时段内的障碍点云,其中,所述障碍点云为所述第二历史时段内每个时刻的障碍点的集合;将所述第二历史时段内的障碍点云中的各个障碍点确定为所述当前时刻的障碍点。
8、在一种可选的方式中,所述第二历史时段内的障碍点云的数据为,所述为所述目标坐标系下的数据,所述第二历史时段内的障碍点云中各个点对应的所述移动设备的姿态为,其中,所述将所述第二历史时段内的障碍点云中的各个障碍点确定为所述当前时刻的障碍点,包括:利用公式,将所述第二历史时段内的障碍点云的数据转换为所述当前时刻的点云数据,其中,为转换后的所述目标坐标系下所述当前时刻的障碍点云的数据,为所述当前时刻所述移动设备的姿态;将中的障碍点确定为所述当前时刻的障碍点。
9、在一种可选的方式中,所述移动设备包括深度传感器,所述历史点云的数据和所述当前点云的数据,均为通过所述深度传感器获取所述移动设备的主要传感器的检测盲区内的探测点的坐标数据。
10、根据本技术实施例的另一方面,提供了一种障碍点的检测装置,所述装置用于检测移动设备行进路径中的障碍点,所述装置包括:第一获取模块,用于获取所述移动设备行进过程中第一历史时段内采集的历史点云的数据;平面拟合模块,用于利用所述历史点云的数据进行平面拟合,获得目标坐标系下的目标拟合平面;第二获取模块,用于获取所述移动设备当前时刻采集的当前点云的数据;转换模块,用于若所述当前点云的数据不是所述目标坐标系下的数据,则将所述当前点云的数据转换为所述目标坐标系下的数据;计算模块,用于计算所述目标坐标系下当前点云中各个点与所述目标拟合平面间的第一距离,得到多个第一距离,其中,各个点分别对应一个第一距离;确定模块,用于将所述多个第一距离中大于第一距离阈值的第一距离对应的点确定为所述当前时刻的障碍点。
11、根据本技术实施例的另一方面,提供了一种障碍点的检测设备,包括:处理器、存储器、通信接口和通信总线,所述处理器、所述存储器和所述通信接口通过所述通信总线完成相互间的通信;所述存储器用于存储可执行指令,所述可执行指令使所述处理器执行如上所述的障碍点的检测方法的操作。
12、根据本技术实施例的又一方面,提供了一种计算机可读存储介质,所述存储介质中存储有可执行指令,所述可执行指令在运行时执行如上述的障碍点的检测方法的操作。
13、本技术实施例中,历史点云的数据和当前点云的数据均是通过深度传感器获取主要传感器的检测盲区内的探测点的坐标数据。由于目标拟合平面是利用距离当前时刻较近的历史时段内采集的移动设备行进路径中的多个点的数据进行平面拟合获得的,因此,获得的目标拟合平面近似于移动设备当前行进路径中的地面,进而通过当前时刻采集的点与目标拟合平面间的距离,即可准确地识别出游离在平面外的点,游离在平面外的点即为障碍点。例如,位于地面上的障碍物的点和位于地面下的水沟的点,其与地面间都存在一定的距离,这些障碍物的点都游离在地面外。
14、上述说明仅是本技术实施例技术方案的概述,为了能够更清楚了解本技术实施例的技术手段,而可依照说明书的内容予以实施,并且为了让本技术实施例的上述和其它目的、特征和优点能够更明显易懂,以下特举本技术的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!