一种基于点云数据的地面分割优化方法与流程
本发明涉及自动驾驶领域,尤其涉及一种基于点云数据的地面分割优化方法。
背景技术:
1、激光雷达对障碍物的精确识别和高精制图能力使之成为自动驾驶车辆环境感知和协同定位所必不可少的设备。满足l3+车规级自动驾驶系统通常会选择在车顶部署高线激光雷达进行360°全方位扫描,而在车周配置低线激光雷达进行特定方向扫描补盲(避免车身遮挡造成感知死角)。这样的“高线主雷达+多补盲雷达”的多激光雷达系统能够很好胜任环境感知工作,但随之而来的爆炸式点云收集能力会对车载计算平台的算力和实时效率造成压力和困扰,其中,造成压力和困扰的热点之一为地面分割功能模块,其通过去除点云采集中的地面信息来提高感知物聚类的精度和效率。常见的地面分割方法包括基于扫描射线的分割方法、基于栅格的分割方法以及基于平面拟合的分割方法,其各自的优缺点如下:
2、基于扫描射线的方法仿照激光雷达探测的物理图像,在雷达坐标系中将点云按照径向距离和垂直张角分组,以自车视角为参考逐个比较每组点云的z坐标以实现“地面”点云和“非地面”点云的分离。基于扫描射线的地面分割方法通用性最强,不明显依赖于场景,算法相对简单,但对应的计算量较大;
3、基于栅格的方法在基于扫描射线的方法基础上,将点云进一步分割为不同的网格,使用每个网格中所包含点云的特征组合作为新网格的特征并进行点云分类。该分类方法相对于扫描射线法而言大大减少了计算量,又能在相当的程度上保留下点云集的几何特征,适合对凹凸不平的地面(坡路、林地等)进行分割,不足之处在于算法效果和栅格大小以及划分方式等紧密相关,过大的网格会使得地面分割精度下降,而过小的网格则对计算加速没有明显优化。该方法为串行逻辑结构,无法使用gpu加速,且受限于网格划分,算法的鲁棒性较差;
4、基于平面拟合的方法假设地面为一个绝对的平面,然后通过聚类和迭代的方式确定平面状态,最终以该平面为参照将点云进行分类。改进版的平面拟合分割方法通常将点云分块拟合获得多个预测平面,之后将多个预测平面的边缘进行拼接和光滑处理以适应路面的起伏。该方法针对较为平坦的路面(公路、城市道路等)往往能够获得很好的分割效果,且算法收敛速度很快,但对于较为复杂的路况则需要对平面参数进行反复的迭代优化,计算量较大且需要依赖于拟合模型的先验信息。
5、因此,一种能够兼顾效率和适应性的地面分割方法是本领域亟需的。
技术实现思路
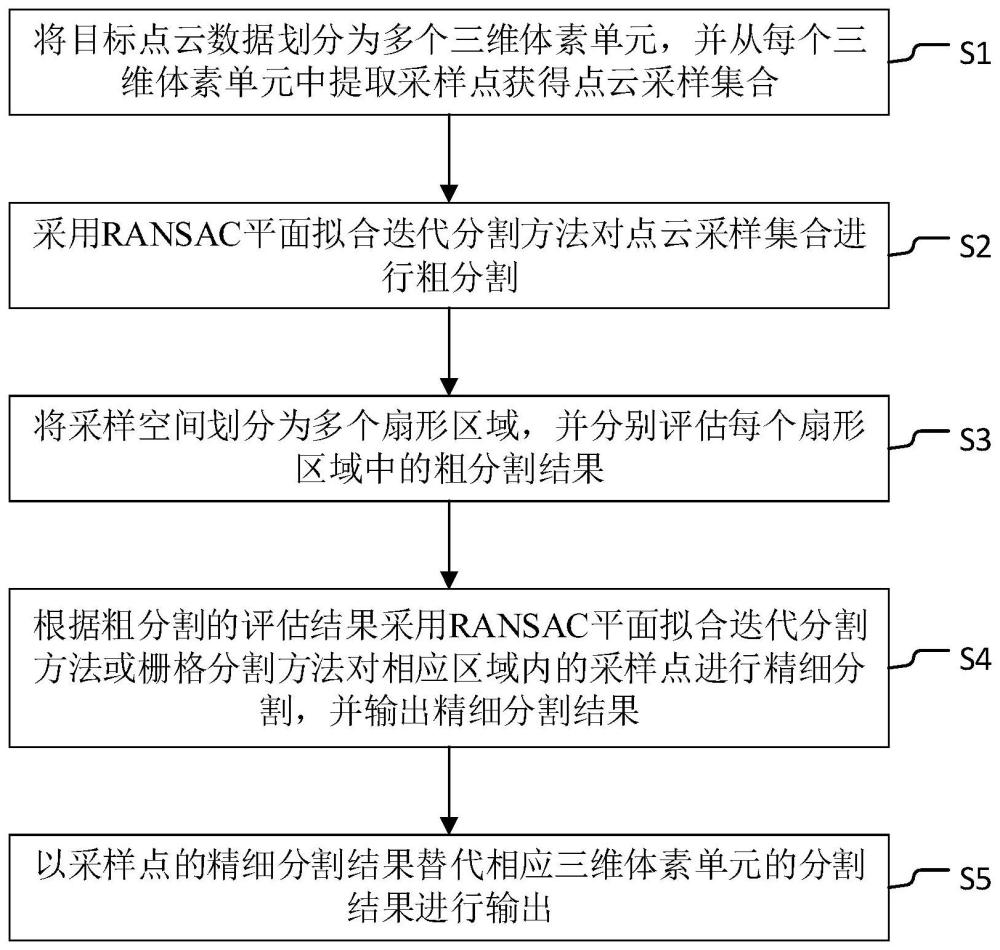
1、为了能够兼顾效率和适应性,本发明提出了一种基于点云数据的地面分割优化方法,包括:将目标点云数据划分为多个三维体素单元,并从每个三维体素单元中提取采样点获得点云采样集合;采用ransac平面拟合迭代分割方法对所述点云采样集合进行粗分割;将所述采样空间划分为多个扇形区域,并分别评估每个扇形区域中的粗分割结果;根据粗分割的评估结果采用ransac平面拟合迭代分割方法或栅格分割方法对相应区域内的采样点进行精细分割,并输出精细分割结果;以所述采样点的精细分割结果替代相应三维体素单元的分割结果进行输出。
2、在一个或多个实施例中,所述将目标点云数据分割为多个三维体素单元,并从每个三维体素单元中提取采样点获得点云采样集合,包括:将目标点云数据分割为多个三维体素单元,并计算每个三维体素单元的重心;提取每个三维体素单元的重心作为采样点获得点云采样集合。
3、在一个或多个实施例中,所述采用ransac平面拟合分割方法对所述点云采样集合进行粗分割,包括:所述采用ransac平面拟合迭代分割方法对所述点云采样集合进行粗分割,包括:提取所述点云采样集合中z轴坐标值最小的多个(不少于三个)采样点作为种子集;采用ransac方法从所述种子集中抽取至少三个非共线的采样点通过平面拟合方法创建初始参考平面;计算每个采样点到所述初始参考平面的正交投影距离;将每个采样点到所述初始参考平面的正交投影距离与预设的分类阈值进行比较以分割所述采样点为地面点或非地面点;根据分割结果更新所述种子集;迭代执行采用ransac方法从所述种子集中抽取至少三个非共线的采样点通过平面拟合方法创建参考平面的步骤及其后续步骤,直至所述种子集不再发生变化或者达到预设的第一迭代次数输出粗分割结果。
4、在一个或多个实施例中,所述将所述采样空间划分为多个扇形区域,并分别评估每个扇形区域中的粗分割结果,包括:将所述点云采样集合中的采样点按照方位角均匀的划分到多个扇形区域中;计算每个扇形区域内各采样点到所述初始参考平面的正交投影距离的平方和;将每个扇形区域内各采样点到所述初始参考平面的正交投影距离的平方和与预设的评估阈值进行比较以评估粗分割结果。
5、在一个或多个实施例中,所述根据粗分割的评估结果采用ransac平面拟合迭代分割方法或栅格分割方法对相应扇形区域内的采样点进行精细分割,并输出精细分割结果,包括:当对应扇形区域内各采样点到所述初始参考平面的正交投影距离的平方和小于所述评估阈值时,迭代采用ransac平面拟合分割方法对所述扇形区域内的采样点进行精细分割;当对应扇形区域内各采样点到所述初始参考平面的正交投影距离的平方和大于等于所述评估阈值时,采用栅格分割方法对所述扇形区域内的采样点进行精细分割。
6、在一个或多个实施例中,所述当对应扇形区域内各采样点到所述初始参考平面的正交投影距离的平方和小于所述评估阈值时,采用ransac平面拟合分迭代割方法对所述扇形区域内的采样点进行精细分割,包括:获取粗分割阶段返回的落在对应扇形区域内的地面点作为精细分割阶段的种子集;采用ransac方法从所述种子集中抽取至少三个非共线的采样点通过平面拟合方法创建参考平面;计算每个采样点到所述参考平面的正交投影距离;将每个采样点到所述参考平面的正交投影距离与预设的分类阈值进行比较以分割所述采样点为地面点或非地面点;根据分割结果更新所述种子集;迭代执行采用ransac方法从所述种子集中抽取至少三个非共线的采样点通过平面拟合方法创建参考平面的步骤及其后续步骤,直至所述种子集不再发生变化或者达到预设的第二迭代次数输出精细分割结果。
7、在一个或多个实施例中,所述当对应扇形区域内各采样点到所述初始参考平面的正交投影距离的平方和大于等于所述评估阈值时,采用栅格分割方法对所述扇形区域内的采样点进行精细分割,包括:计算每个采样点相对于雷达坐标系原点的径向距离;对每个采样点按照其径向距离由小到大依次排序;将径向距离最小的采样点确定为地面点;根据排序依次计算两个相邻采样点的相对坡度,并判断所述相对坡度是否大于等于预设的局域坡度阈值;当下一采样点相对于上一相邻采样点的相对坡度大于等于所述局域坡度阈值时,为所述下一采样点分配与上一相邻采样点相同的分类标记;当下一采样点相对于上一相邻采样点的相对坡度小于所述局域坡度阈值,继续判断所述下一采样点的全局坡度是否大于等于预设的全局坡度阈值;是则,为所述下一采样点分配地面标记;否则,为所述下一采样点分配非地面标记。
8、在一个或多个实施例中,所述方法还包括对所述目标点云数据按照以下方式进行加速处理:将ransac平面拟合分割方法发送至gpu,并由gpu并发执行所述ransac平面拟合分割方法中的相应步骤处理当前帧;将栅格分割方法处理发送至cpu,并启动多线程并发执行所述栅格分割方法中的相应步骤处理当前帧。
9、在一个或多个实施例中,本发明的基于点云数据的地面分割优化方法还包括:基于当前帧的分割结果为当前帧的每个体素单元分配采样权重;基于当前帧的每个体素单元的采样权重计算下一帧点云数据的采样概率密度分布;处理下一帧采样数据,并根据所述采样概率密度分布提取ransac种子集。
10、在一个或多个实施例中,所述基于当前帧的分割结果为当前帧的每个体素单元分配采样权重,包括:当所述体素单元的分割结果为地面时,根据所述体素单元中的点云数据数量在所述目标点云数据中的占比设置采样权重;当所述体素单元的分割结果为非地面时,为所述体素单元设置预设的下限权重,所述下限权重大于零。
11、本发明的有益效果包括:本发明首先通过体素化分割及采样点抽取方式大幅度降低了所需处理的数据总量,而后通过ransac平面拟合分割方法的对采样空间进行粗分割以求快速完成对路面的平整部分地面的快速分割,而后再通过对粗分割结果的分区评估,快速定位路面中的不平整部分,并通过切换栅格分割方法对其进行局部的精细分割,最后以采样点的精细分割结果替代相应的体素单元完成对全部点云数据的地面分割,使得本发明方法能够兼顾分割效率和分割方法的适应场景,实现了精准、高效的地面分割。
- 还没有人留言评论。精彩留言会获得点赞!