一种基于时空融合的遥感数据处理方法及装置
本技术涉及遥感数据处理,特别涉及一种基于时空融合的遥感数据处理方法及装置。
背景技术:
1、在遥感影像处理中,不同的传感器得到的影像数据会具有不同的劣势,如由landsat卫星获得的数据具有高分辨率、但时间不连续的特点;而由modis获取的数据则具有空间分辨率较低的特点。通过时空融合方法,可以融合不同特点的数据,实现不同来源数据之间的优势互补,达到遥感数据增强的目的。然而,目前的大部分时空融合方法具有融合结果鲁棒性弱,且由于各期融合过程的重复性较高,会导致融合过程效率低等问题。
技术实现思路
1、本技术提供一种基于时空融合的遥感数据处理方法及装置。
2、第一方面,提供一种基于时空融合的遥感数据处理方法。该方法包括:
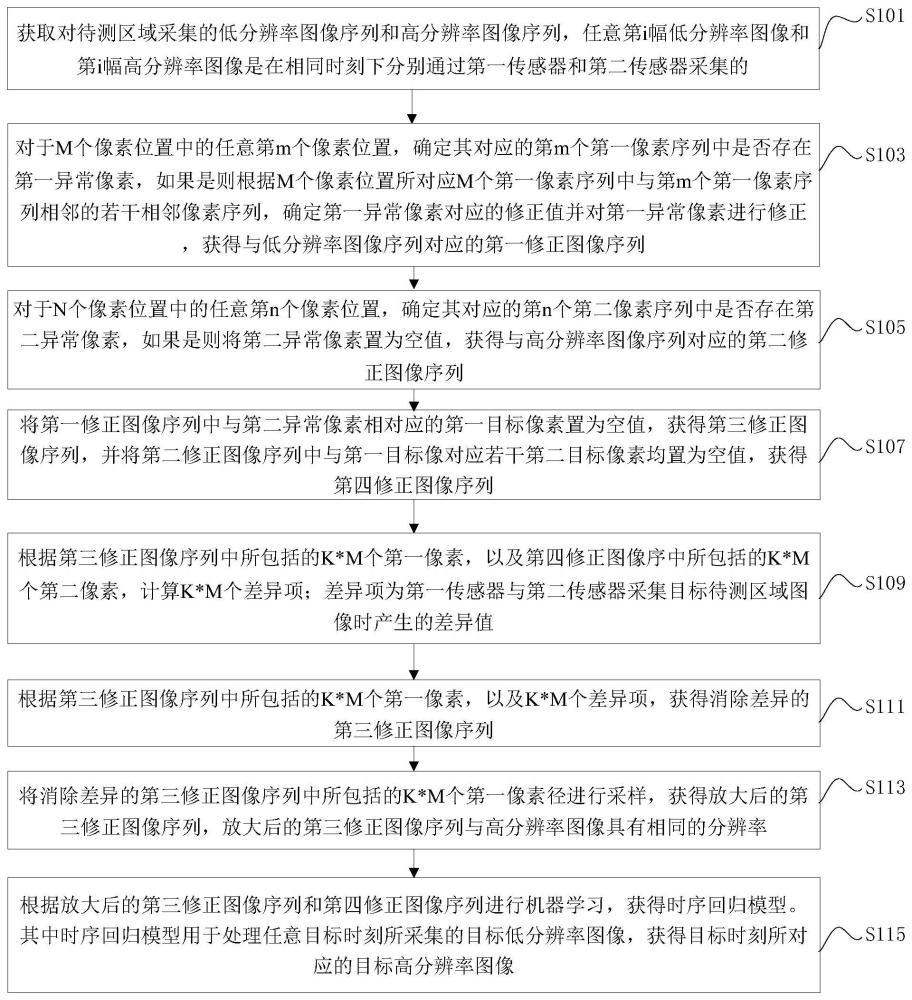
3、获取对待测区域采集的低分辨率图像序列和高分辨率图像序列,任意第i幅低分辨率图像和第i幅高分辨率图像是在相同时刻下分别通过第一传感器和第二传感器采集的,所述低分辨率图像包括位于m个像素位置的m个第一像素,所述高分辨率图像包括位于n个像素位置的第二像素;
4、对于所述m个像素位置中的任意第m个像素位置,确定其对应的第m个第一像素序列中是否存在第一异常像素,如果是则根据所述m个像素位置所对应m个第一像素序列中与所述第m个第一像素序列相邻的若干相邻像素序列,确定所述第一异常像素对应的修正值并对所述第一异常像素进行修正,获得与所述低分辨率图像序列对应的第一修正图像序列;
5、对于所述n个像素位置中的任意第n个像素位置,确定其对应的第n个第二像素序列中是否存在第二异常像素,如果是则将所述第二异常像素置为空值,获得与所述高分辨率图像序列对应的第二修正图像序列;
6、将所述第一修正图像序列中与所述第二异常像素相对应的第一目标像素置为空值,获得第三修正图像序列,并将所述第二修正图像序列中与所述第一目标像对应若干第二目标像素均置为空值,获得第四修正图像序列;
7、根据所述第三修正图像序列和所述第四修正图像序列进行机器学习,获得时序回归模型,其中所述时序回归模型用于处理任意目标时刻所采集的目标低分辨率图像,获得所述目标时刻所对应的目标高分辨率图像。
8、在一种可能的实施方式中,所述根据所述第三修正图像序列和所述第四修正图像序列进行机器学习,获得时序回归模型,还包括:
9、将所述第三修正图像序列中所包括的i*m个第一像素采样,获得放大后的第三修正图像序列;所述放大后的第三修正图像序列与所述高分辨率图像具有相同的分辨率;
10、根据所述放大后的第三修正图像序列和所述第四修正图像序列进行机器学习,获得时序回归模型。
11、在一种可能的实施方式中,所述方法还包括:
12、根据所述第三修正图像序列中所包括的i*m个第一像素,以及所述第四修正图像序中所包括的i*m个第二像素,计算i*m个差异项;所述差异项为所述第一传感器与所述第二传感器采集目标待测区域图像时产生的差异值;
13、根据所述差异项,构建差异项估计模型。
14、在一种可能的实施方式中,所述根据所述第三修正图像序列和所述第四修正图像序列进行机器学习,获得时序回归模型,包括;
15、根据所述第三修正图像序列中所包括的i*m个第一像素,以及所述i*m个差异项,获得消除差异的第三修正图像序列;
16、根据所述消除差异的第三修正图像序列和所述第四修正图像序列进行机器学习,获得时序回归模型。
17、在一种可能的实施方式中,所述根据所述消除差异的第三修正图像序列和所述第四修正图像序列进行机器学习,获得时序回归模型,还包括:
18、根据所述消除差异的第三修正图像序列和所述第四修正图像序列进行机器学习,以及差异项估计模型,获得时序回归模型。
19、在一种可能的实施方式中,所述方法还包括:
20、获取对待测区域采集的目标低分辨率图像,所述目标低分辨率图像是在目标时刻下通过所述第一传感器采集的;所述目标低分辨率图像包括位于m个像素位置的m个第一像素,
21、对于所述m个像素位置中的任意第m个像素位置,确定其对应的第m个像素否为第一异常像素,如果是则根据所述m个像素位置所对应m个第一像素中与所述第m个第一像素序列的若干相邻像素,确定所述第一异常像素对应的修正值并对所述第一异常像素进行修正,获得与所述目标低分辨率图像对应的第三目标修正图像;
22、根据所述时序回归模型处理所述第三目标修正图像;获得目标时刻所对应的目标高分辨率图像。
23、在一种可能的实施方式中,所述根据所述第三修正图像序列和所述第四修正图像序列进行机器学习,获得时序回归模型,包括:
24、将所述第三修正图像序列中所包括的i*m个第一像素采样,获得放大后的第三修正图像序列;所述放大后的第三修正图像序列与所述高分辨率图像具有相同的分辨率;
25、所述根据所述时序回归模型处理所述第三目标修正图像;获得目标时刻所对应的目标高分辨率图像,包括:
26、将所述第三目标修正图像中所包括的m个第一像素采样,获得放大后的第三目标修正图像;所述放大后的第三目标修正图像与所述高分辨率图像具有相同的分辨率。
27、根据所述时序回归模型处理所述放大后的第三目标修正图像;获得目标时刻所对应的目标高分辨率图像。
28、在一种可能的实施方式中,所述根据所述第三修正图像序列和所述第四修正图像序列进行机器学习,获得时序回归模型,包括:
29、根据所述第三修正图像序列中所包括的i*m个第一像素,以及所述第四修正图像序中所包括的i*m个第二像素,计算i*m个差异项;所述差异项为所述第一传感器与所述第二传感器采集目标待测区域图像时产生的差异值;
30、根据所述差异项,构建差异项估计模型;
31、根据所述第三修正图像序列中所包括的i*m个第一像素,以及所述i*m个差异项,获得消除差异的第三修正图像序列;
32、根据所述消除差异的第三修正图像序列和所述第四修正图像序列进行机器学习,获得时序回归模型;
33、所述根据所述时序回归模型处理所述第三目标修正图像;获得目标时刻所对应的目标高分辨率图像,包括:
34、根据所述差异项估计模型,计算所述第三目标修正图像所对应的m个差异项,
35、根据所述第三目标修正图像中所包括的m个第一像素,以及所述m个差异项,获得消除差异的第三目标修正图像;
36、根据所述时序回归模型处理所述消除差异的第三目标修正图像;获得目标时刻所对应的目标高分辨率图像。
37、第二方面,提供一种基于时空融合的遥感数据处理装置,所述装置包括:
38、数据获取单元,用于获取对待测区域采集的低分辨率图像序列和高分辨率图像序列,任意第i幅低分辨率图像和第i幅高分辨率图像是在相同时刻下分别通过第一传感器和第二传感器采集的,所述低分辨率图像包括位于m个像素位置的m个第一像素,所述高分辨率图像包括位于n个像素位置的第二像素;
39、第一修正单元,用于对于所述m个像素位置中的任意第m个像素位置,确定其对应的第m个第一像素序列中是否存在第一异常像素,如果是则根据所述m个像素位置所对应m个第一像素序列中与所述第m个第一像素序列相邻的若干相邻像素序列,确定所述第一异常像素对应的修正值并对所述第一异常像素进行修正,获得与所述低分辨率图像序列对应的第一修正图像序列;
40、第二修正单元,用于对于所述n个像素位置中的任意第n个像素位置,确定其对应的第n个第二像素序列中是否存在第二异常像素,如果是则将所述第二异常像素置为空值,获得与所述高分辨率图像序列对应的第二修正图像序列;
41、第三修正单元,用于将所述第一修正图像序列中与所述第二异常像素相对应的第一目标像素置为空值,获得第三修正图像序列,并将所述第二修正图像序列中与所述第一目标像对应若干第二目标像素均置为空值,获得第四修正图像序列;
42、模型构建单元,用于根据所述第三修正图像序列和所述第四修正图像序列进行机器学习,获得时序回归模型,其中所述时序回归模型用于处理任意目标时刻所采集的目标低分辨率图像,获得所述目标时刻所对应的目标高分辨率图像。
43、第三方面,提供一种计算设备,包括存储器和处理器,所述存储器中存储有可执行代码,所述处理器执行所述可执行代码时,实现第一方面中任一项所述的方法。
44、本技术提供的技术方案中,首先,通过获取待测区域采集的低分辨率图像序列和高分辨率图像序列,并根据像素序列之间的相关性,对低分辨率图像序列中存在的异常像素进行修正;随后,将高分辨率图像序列存在的异常像素,对应于低分辨率图像序列中的第一像素设为空值,并将该第一像素所对应的高分辨率图像序列中的第二像素全部设为空值;最后,根据两次修正后的低分辨率图像序列和单次修正后的高分辨率图像序列进行机器学习,获得时序回归模型;综合传统时空融合先验原理与机器学习方法的特点,所获得的时许回归模型能够基于目标低分辨率图像,更加高效且准确的预测出目标高分辨率图像。
- 还没有人留言评论。精彩留言会获得点赞!