基于单目摄像机的圆柱物体表面切割拼图方法及装置与流程
本发明涉及计算机图形学,尤其是一种基于单目摄像机的圆柱物体表面切割拼图方法及装置。
背景技术:
1、图像切割与拼图算法是一类用于将原始图像分割成多个部分,并将这些部分重新组合成一个新的完整图像的计算机图形学算法。这些算法广泛应用于图像处理、计算机视觉、虚拟现实、游戏开发等领域。随着计算机性能的提高和图形硬件的发展,人们开始研究更复杂的图像拼图算法,以实现更加灵活和高级的效果。现代图像切割与拼图算法已经能够处理各种复杂场景,包括不规则形状的图像拼接、动态拼接、无缝拼接等。
2、随着工业技术、图像处理技术、图像识别技术的快速发展,目前在工业生产制造中,为了提升生产效率,生产精度等,催生了一大批应用于工业生产的图像处理与识别算法。例如:针对圆形目标物体的中心识别、边缘识别等。本发明即为工业生产场景中,针对常用的圆柱形物体或容器,在固定式单目摄像机条件下,进行快速图像分割与拼图的一种装置及方法。由于生产制造过程中理论识别方法受到实际环境制约,如采样拍摄现场的光照条件、被采样圆柱形物体的表面粗糙程度、采样旋转平台的旋转速度、采样摄像机的录制规格等条件,使得圆柱形目标物体在采样过程中,不可避免地产生采样照片表面过曝、图像畸变、图像噪点过多等问题,使得采集圆柱物体表面信息的最终目标难以实现。
3、图像切割与拼图算法基本原理是将原始图像分割成多个部分,然后对这些部分进行处理、重新排列、组合以生成一个完整的图像。通常的方法步骤包含1-图像预处理、2-图像分割、3-图像变换、4-图像拼接、5-后处理等几个步骤。
技术实现思路
1、本发明的目的就是针对上述情况,提供一种基于单目摄像机的圆柱物体表面切割拼图方法及装置。
2、本发明的具体方案是:基于单目摄像机的圆柱物体表面切割拼图方法,包括有以下步骤:
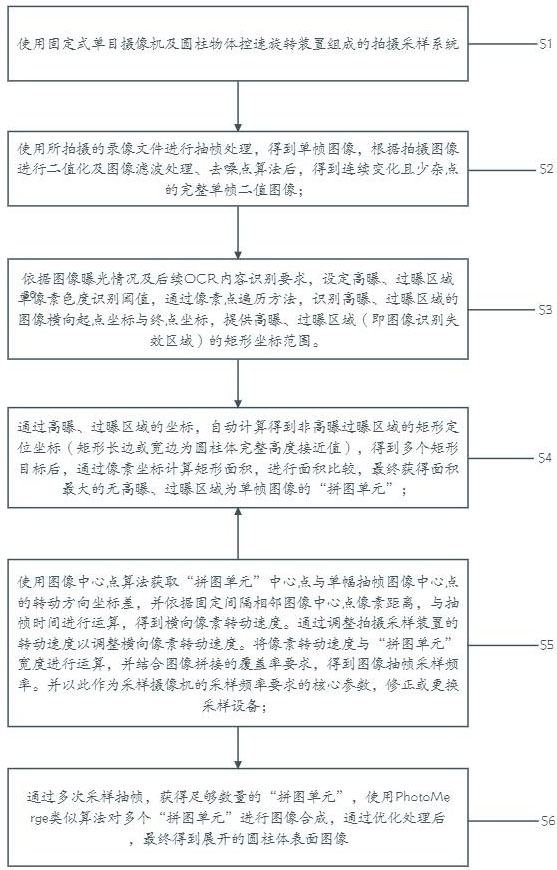
3、s1、使用固定式单目摄像机及圆柱物体控速旋转装置组成的拍摄采样系统;
4、s2、使用所拍摄的录像文件进行抽帧处理,得到单帧图像,根据拍摄图像进行二值化及图像滤波处理、去噪点算法后,得到连续变化且少杂点的完整单帧二值图像;
5、s3、依据图像曝光情况及后续ocr内容识别要求,设定高曝、过曝区域单像素色度识别阈值,通过像素点遍历方法,识别高曝、过曝区域的图像横向起点坐标与终点坐标,提供高曝、过曝区域的矩形坐标范围;
6、s4、通过高曝、过曝区域的坐标,自动计算得到非高曝过曝区域的矩形定位坐标,该矩形定位坐标是指矩形长边或宽边为圆柱体完整高度接近值,得到多个矩形目标后,通过像素坐标计算矩形面积,进行面积比较,最终获得面积最大的无高曝、过曝区域为单帧图像的拼图单元;
7、s5、使用图像中心点算法获取所述拼图单元中心点与单幅抽帧图像中心点的转动方向坐标差,并依据固定间隔相邻图像中心点像素距离,与抽帧时间进行运算,得到横向像素转动速度;通过调整拍摄采样系统的转动速度以调整横向像素转动速度,将像素转动速度与拼图单元宽度进行运算,并结合图像拼接的覆盖率要求,得到图像抽帧采样频率;
8、s6、通过多次采样抽帧,获得足够数量的有效拼图单元,使用photomerge工具对多个拼图单元进行图像合成,通过优化处理后,最终得到展开的圆柱体表面图像。
9、进一步的,本发明中所述步骤s3中所包含的方法:
10、s31、由于图像的高曝、过曝区域在二值化后,通常为接近白色,像素的灰度值会稳定在0-255之间的一个靠近255白色的区域,该阈值的取值可依据工程经验取值,通过提供高曝、过曝区域的阈值识别抽帧图像中,该区域的坐标范围,该范围依据实际情况有一个或多个;
11、s32、由于主要目标为识别圆柱物体表面内容并提供自动阈值切割方法,该高曝、过曝区域仅需提供横向坐标起点与终点。
12、进一步的,本发明中步骤s4中,根据坐标计算面积,再进行面积比较的方法,包括:实际因所得非高曝、过曝区域的面积单边长度或宽度与圆柱目标物体的高度一致,仅需要针对该区域的横向起始点与结束点的长度即可得到对应面积最大的区域作为拼图单元。
13、进一步的,本发明中步骤s5中,调整采样设备参数及获取抽帧采样参数的方法,包括:
14、s51、通过当前拍摄采样设备的转速,选取固定间隔数的连续照片之间图像中心点的相对旋转一周重复出现的时间,依据一周的拟合像素周长以及旋转一周的时间,计算得到像素点平均移动速度;
15、s52、获取拼图单元的更新采样像素宽度a,用该(像素宽度*(1-实际图像采样重叠率))除以像素点平均移动速度,得到抽帧采样所需设定的时间间隔,采样频率即为1/采样时间间隔,其中,实际图像采样重叠率大于理论算法要求的图像融合最低要求重叠率,用于提供更多特征。
16、进一步的,本发明中步骤s6中,图像合成所采用的方法,包括:
17、s61、足够数量的“拼图单元”指的是,当采样的“拼图单元”数量满足依据圆柱体物体的半径、拼图重叠率要求、实现完整拼图得到该圆柱体的表面展开图时所需的数量;
18、s62、拼图单元指的是在单目摄像头条件下,满足ocr识别算法条件的区域,当圆柱物体在旋转时,表面经过该区域并通过采样抽帧及阈值切割得到的部分采样区域,即为有效拼图单元;
19、s63、优化处理包含并不限于针对图像进行的图形畸变处理、噪点处理、图像平滑处理、图像锐化处理技术。
20、基于单目摄像机的圆柱物体表面切割拼图装置,该装置用于实施上述任意一项所述的方法,该装置包括有旋转式单目采样装置、图像预处理模块、图像阈值切割模块、非高曝过曝区域坐标输出模块、采样参数计算模块、图像优化及融合模块;所述旋转式单目采样装置是针对目标圆柱物体而搭建,其实现可调旋转速度、可调拍摄视频采样参数、可调抽帧参数的视频采样;图像预处理模块包括有二值化、滤波、降噪处理模块:
21、所述旋转式单目采样装置使用电机皮带轮控制的旋转圆盘,结合固定杆位置单目摄像机,摄像机可控视频采样规格,搭建视频采样装置模块;
22、所述二值化、滤波、降噪处理模块,用于在经过抽帧处理后,将采样图片进行通用的二值化算法、图像滤波处理、图像去噪点处理,实现处理后得到因光照条件及被拍摄物体表面平整度因素导致的过曝、高曝图像;
23、所述图像阈值切割模块,用于在获取采样照片的高曝、过曝区域坐标值之后,为系统提供自动比对,并计算出当前拍摄条件下的被摄圆柱物体表面在固定拍摄角度下的面积最大的最优可识别区域;
24、所述非高曝过曝区域坐标输出模块,用于在识别该区域后,通过像素遍历的方式,提供横向遍历情况下该区域的起始点坐标与终点坐标;
25、所述采样参数计算模块,用于通过参考拼图图像融合相关的图像重叠率要求,结合拍摄装置的速度可调的特点,调整旋转速度,使其旋转速度可与对应的采样频率匹配,达到采样抽帧与拼图所需拼图单元对应;
26、所述图像优化及融合模块,用于对采样切片(即拼图单元)进行畸变处理、平滑处理、图像特征点匹配拼接。
27、本发明是专门针对固定式单目摄像机识别圆柱物体表面信息情况下的圆柱物体表面有效可识别区域的图像采样与图像处理问题而设计,有效解决了该场景下因环境光照条件、拍摄摄像机参数差异、物体旋转速度、拍摄角度等问题导致的圆柱物体表面采样图像数据不可用的问题。
- 还没有人留言评论。精彩留言会获得点赞!