一种基于机器学习的无人机农作物监测方法及系统与流程
本发明涉及农作物监测,更具体地说,本发明涉及一种基于机器学习的无人机农作物监测方法及系统。
背景技术:
1、随着信息化时代的到来,建设现代化农业发展体系成为我国农业领域当前的焦点关注,大量实践证明,将无人机遥感技术应用于农业生产领域,能够实现对农作物各个生长阶段的快速、精准、全面监测和管理,无人机可以迅速获取农作物生长信息,从而精确监测作物的色素、病虫害、长势等情况,此外,无人机搭载的摄像机具备较高的分辨率,保证了数据信息的精准性,通过信息处理技术,可以有效提取相关地物信息,一般情况下,无人机首先获取农作物的高度信息和图像,然后利用这些数据来实现对农作物的精确监测,这一技术的应用为农业领域带来了巨大的便利和潜力;
2、例如,申请公开号为cn113989689a的专利公开了一种基于无人机的农作物病虫害识别方法及系统,该专利通过对无人机拍摄的农作物图片进行处理,根据农作物叶片的脉络结构,先识别农作物的叶片,然后再将识别的叶片输入卷积神经网络或者深度学习模型,检测农作物病虫害信息,实现了基于无人机的农作物病虫害识别,申请公开号为cn106643529a的专利公开了基于无人机影像的山区农作物生长高度快速测量的方法,该专利通过获得农作物在每个阶段的生长高度,以此对农作物进行监测,虽然上述专利都在一定程度上实现了对农作物的监测,但还存在以下问题:
3、上述专利虽然通过农作物的叶片以及深度学习模型对农作物的虫害进行识别,但是由于农作物的面积较大,上述专利依次通过图片进行识别无疑会增加工作量导致监测的效率也不高,虽然存在现有技术,通过对农作物的生长高度进行快速测量已实现对农作物的监测,但是上述专利只通过生长高度对农作物监测会出现不准确的问题,因为不仅是虫害会对农作物的生成高度存在影响,天气原因会使得农作物出现倒伏现象,导致农作物的生长高度的检测出现误差,从而对该区域的农作物的生长状态出现误判的现象。
4、鉴于此,本发明提出一种基于机器学习的无人机农作物监测方法及系统以解决上述问题。
技术实现思路
1、为了克服现有技术的上述缺陷,本发明提供一种基于机器学习的无人机农作物监测方法及系统。
2、为实现上述目的,本发明提供如下技术方案:
3、一种基于机器学习的无人机农作物监测方法,包括:
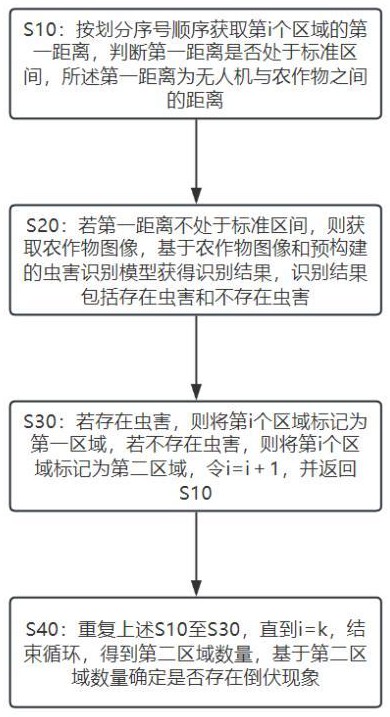
4、s10:按划分序号顺序获取第i个区域的第一距离,判断第一距离是否处于标准区间,所述第一距离为无人机与农作物之间的距离;
5、s20:若第一距离不处于标准区间,则获取农作物图像,基于农作物图像和预构建的虫害识别模型获得识别结果,识别结果包括存在虫害和不存在虫害;
6、s30:若存在虫害,则将第i个区域标记为第一区域,若不存在虫害,则将第i个区域标记为第二区域,令i=i+1,并返回s10;
7、s40:重复上述s10至s30,直到i=k,结束循环,得到第二区域数量,基于第二区域数量确定是否存在倒伏现象。
8、进一步地,标准区间的生成方法包括:
9、获取农作物的生长时间和植物类别,将生长时间和植物类别输入到预构建的高度预测模型中,以获得高度预测模型输出的第一高度区间;
10、基于农作物的生长时间和植物类别从数据库中获得第二高度区间,根据第一高度区间和第二高度区间生成第三高度区间;
11、获取第二距离,基于第三高度区间和第二距离生成标准区间,所述第二距离为无人机到地面的距离。
12、进一步地,根据第一高度区间和第二高度区间生成第三高度区间的方法包括:
13、取第一高度区间和第二高度区间之间的交集以形成第三高度区间。
14、进一步地,高度预测模型的构建方法包括:
15、获取样本数据集,所述样本数据集中包括历史生长时间、历史植物类别和历史标准区间,将样本数据集划分为样本训练集和样本测试集,构建回归网络,以样本训练集中的历史生长时间和历史植物类别作为回归网络的输入数据,以样本训练集中的历史标准区间作为回归网络的输出数据,对回归网络进行训练,得到用于预测实时标准区间的初始回归网络,利用样本测试集对初始回归网络进行测试,输出满足小于预设误差值的回归网络作为速率确定模型。
16、进一步地,虫害识别模型的构建方法包括:
17、获取h组数据,h为大于1的正整数,数据包括历史农作物图像和历史识别结果,将历史农作物图像和历史识别结果作为样本集,将样本集划分为训练集和测试集,构建分类器,将训练集中的历史农作物图像作为输入数据,将训练集中的历史识别结果作为输出数据,对分类器进行训练,得到初始分类器,利用测试集对初始分类器进行测试,输出满足预设准确度的分类器作为固废分类模型。
18、进一步地,基于第二区域数量确定是否存在倒伏现象的方法包括:
19、判断第二区域数量是否小于预设区域数量阈值,若是,则不存在倒伏现象,若否,则存在倒伏现象。
20、进一步地,距离补偿模型的构建方法包括:
21、获取样本数据集,所述样本数据集中包括历史风力信息、历史植物类别、历史第一距离和历史第二距离,将样本数据集划分为样本训练集和样本测试集,构建回归网络,以样本训练集中的历史风力信息、历史植物类别和历史第一距离作为回归网络的输入数据,以样本训练集中的历史第二距离作为回归网络的输出数据,对回归网络进行训练,得到用于预测实时第二距离的初始回归网络,利用样本测试集对初始回归网络进行测试,输出满足小于预设误差值的回归网络作为速率确定模型。
22、一种基于机器学习的无人机农作物监测系统,其用于实现上述的一种基于机器学习的无人机农作物监测方法,包括:
23、距离获取模块:按划分序号顺序获取第i个区域的第一距离,判断第一距离是否处于标准区间,所述第一距离为无人机与农作物之间的距离;
24、虫害识别模块:若第一距离不处于标准区间,则获取农作物图像,基于农作物图像和预构建的虫害识别模型获得识别结果,识别结果包括存在虫害和不存在虫害;
25、区域标记模块:若存在虫害,则将第i个区域标记为第一区域,若不存在虫害,则将第i个区域标记为第二区域,令i=i+1,并返回距离获取模块;
26、数量确定模块:重复上述距离获取模块至区域标记模块,直到i=k,结束循环,得到第二区域数量,基于第二区域数量确定是否存在倒伏现象。
27、一种电子设备,包括电源、接口、键盘、存储器、中央处理器以及存储在存储器上并可在中央处理器上运行的计算机程序,所述处理器执行计算机程序时实现上述的一种基于机器学习的无人机农作物监测方法,所述接口包括网络接口与数据接口,网络接口包括有线或无线接口,数据接口包括输入或输出接口。
28、一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被执行时实现上述任一项所述一种基于机器学习的无人机农作物监测方法。
29、相比于现有技术,本发明的有益效果为:
30、本发明中先获取无人机到农作物的距离,先根据第一距离进行判断,这样不仅缩短了对农作物区域监测所花的时间,同时也对农作物区域是否发生虫害进行了监测,同时根据识别结果对异常区域进行标记,将异常区域标记为第一区域和第二区域,最后再根据第二区域的数量进一步判断农作物是否出现倒伏现象,若出现倒伏现象,则并不需要对第二区域进行下一步的措施,只需要对第一区域进行治理,以此提高治理的准确性和效率,若没有出现倒伏现象,则第一区域和第二区域均需要进行治理。
- 还没有人留言评论。精彩留言会获得点赞!