智能油气管道环境隐患实时识别方法及系统与流程
本发明涉及油气管道巡检,具体地说,涉及一种智能油气管道环境隐患实时识别方法及系统。
背景技术:
1、油气管道作为常用的石油和天然气传输介质,管道区域通常具有需求大、距离长、范围广等特点,同时这些区域往往处于复杂的地理环境,因此通过定期巡检来掌握管道运行状况及周围环境的变化,发现危及管道安全的隐患,及时进行清除或限制在最小范围,预防事故发生,以确保其稳定性和安全性是必须的。传统的油气管道周围环境隐患主要依靠管道巡护人员的人工识别,要求巡护人员具备较高的专业水平以及长时间的工作经验,才能给出准确的识别,所需的培训成本和人工成本较高。也有部分现有技术为降低对管道巡护人员的专业要求及培训、人工成本,建设了相关系统,让专业能力低的巡护人员现场采集图像数据,辨识人员对采集的图像数据进行人工识别,但也存在采集的图像数据不能充分反应现场情况,容易遗漏的问题。而且人工在连续长时间的识别过程中,随着精力和注意力的下降,对油气管道周围环境的隐患识别耗费的时间越来越多,识别准确率也会进一步的下降,容易误识漏识。
技术实现思路
1、本发明的内容是提供一种智能油气管道环境隐患实时识别方法及系统,其能够较佳地实时识别油气管道环境隐患。
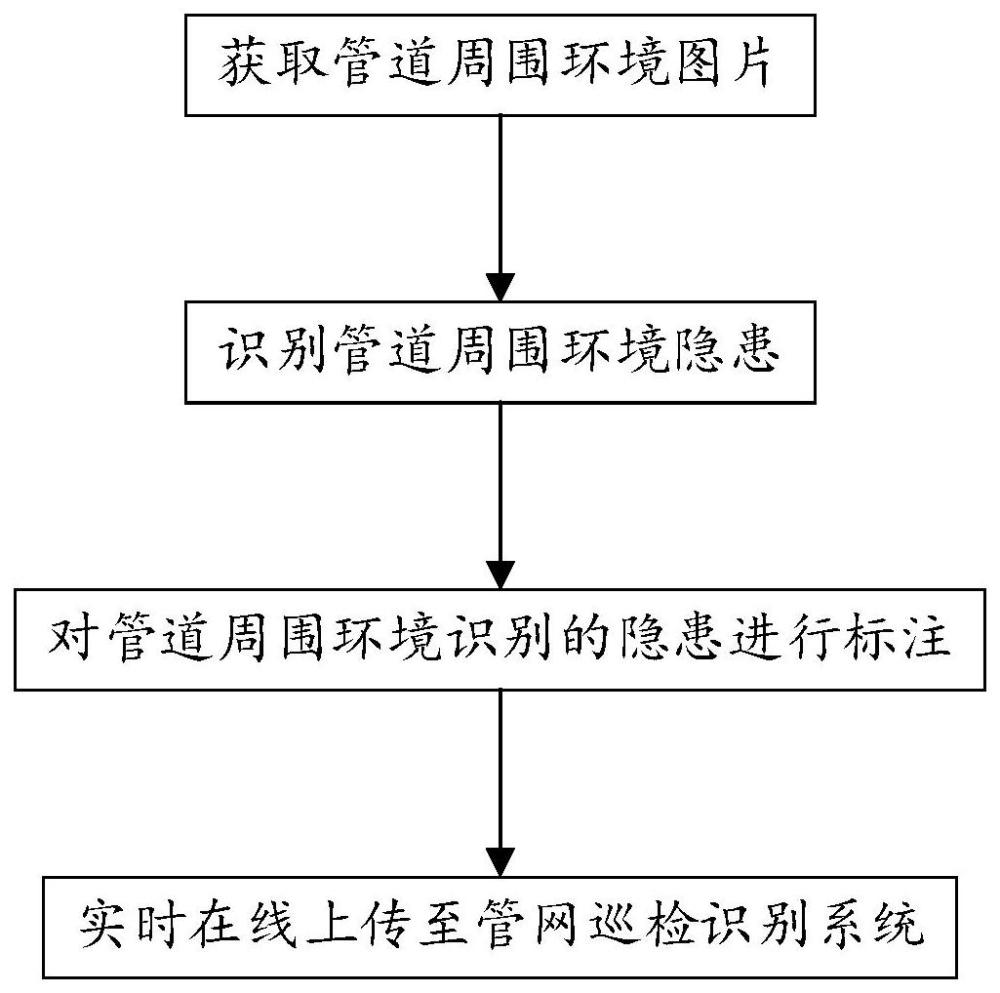
2、根据本发明的智能油气管道环境隐患实时识别方法,其包括以下步骤:
3、1)获取管道周围环境图片;
4、2)识别管道周围环境隐患;
5、3)对管道周围环境识别的隐患进行标注;
6、4)实时在线上传至管网巡检识别系统。
7、作为优选,步骤1)中,巡检人员使用手机按连桩拍照巡护专业标准拍摄管道周围环境照片。
8、作为优选,步骤2)中,管道周围环境隐患包括:第三方施工、管道及附属设施、地质灾害;
9、第三方施工包括裸土、板房、建材、建筑垃圾、戴安全帽、穿反光衣、施工机械;施工机械包括挖掘机、推土机、钻机、打桩机、起重机、塔吊、搅拌车、翻斗车、载重汽车、工程车;
10、管道及附属设施包括管道本体位移、管道本体漂浮、管道本体裸露、管道本体破损、管沟塌陷、地面标志位移、地面标志倾倒、地面标志破损、水工保护设施塌陷、水工保护设施损毁、水工保护设施松动;
11、地质灾害包括崩塌、滑坡、泥石流、地面塌陷、地裂缝。
12、作为优选,步骤2)中,识别方法为:
13、2.1)图像的全面扫描;
14、2.2)获取图像特征;
15、2.3)与本地数据库中的已有管道周围环境隐患图像特征进行搜索匹配;
16、2.4)匹配到相似度最高的;
17、2.5)给出最终匹配结果;
18、2.6)输出管道周围环境隐患结果注记至管网巡检识别系统。
19、作为优选,步骤2)中,自动通过ai算法识别照片的方法识别管道周围环境隐患。
20、作为优选,ai算法识别包括以下步骤:
21、a、对图像数据进行边缘检测预处理;
22、b、将预处理后的图像输入深度学习训练完成的识别模型中,进行隐患识别;其中,识别模型基于darknet53骨干网络及多尺度特征提取网络构建;
23、c、识别模型的darknet53骨干网络对预处理后的图像进行卷积、批正则化及激活处理,其中,批正则化处理的惩罚函数设置如下:
24、j~(θ;x,y)=j(θ;x,y)+αω(θ)
25、其中,x表示输入图像,y表示其对应的标签,θ表示权重系数向量,j()表示该层优化标准目标函数,α∈[0,+∞]表示权衡范数惩罚项ω(θ)和标准目标函数j(θ;x,y)相对贡献的超参数,且:
26、
27、其中i表示优化卷积层数;
28、激活处理通过leakyrelu激活函数实现;
29、d、提取识别模型的多尺度特征,在三个不同的尺度上创建进行目标边界框预测的预测单元,其中每个预测单元包括一个识别头,共三个识别头,与三个识别头分别相连三个卷积层,其中卷积层一与darknet53骨干网络的第五组残差块的输出相连,卷积层二与darknet53骨干网络的第四组残差块的输出相连,卷积层三与darknet53骨干网络的第三组残差块的输出相连,并与卷积层一、卷积层二及卷积层三的输出相连的激活层及dropout层,同时,卷积层一与卷积层二、卷积层二与卷积层三分别相连;
30、e、根据最终卷积结果,得到图像识别的最终结果。
31、作为优选,边缘检测预处理包括以下步骤:
32、a、将获得的图像数据转化为灰度图数据;
33、b、将所得灰度图数据进行边缘检测,获得其边缘检测图,即预处理后的图像,具体如下:
34、b1、通过一阶微分算子获得灰度图在水平及竖直方向上的差分;
35、b2、通过水平及竖直方向上的差分的平方和,获得候选像素点的梯度模和对应的梯度角;
36、b3、将所得梯度角θ按±iπ/8、i=1,3,5,7对灰度图进行分割,得到分别对应图像水平、竖直、两条对角线这四个方向的分割区,以每条分割线上的梯度模值代表图像在对应的方向上的候选像素点梯度模值;
37、b4、通过高、低双阈值对所得四个方向上的候选像素点梯度模值进行划分,对其中梯度模值大于高阈值和小于低阈值的像素点进行抑制,对梯度模值在高阈值与低阈值之间的像素点进行保留,得到边缘检测图。
38、作为优选,步骤3)中,标注方法为:
39、在图片上用醒目的框线标注存在的安全隐患位置、范围和匹配度;在gis电子地图上标注安全隐患地理位置。
40、本发明提供了一种智能油气管道环境隐患实时识别系统,其采用上述的智能油气管道环境隐患实时识别方法,并包括:
41、移动端数据采集软件,用于采集巡检数据;
42、数据库服务器,实时将管道巡检的数据存储于服务器上;
43、移动端数据采集软件用移动通信网络或者wifi进行数据采集的数据与数据库服务器之间进行数据传输。
44、本发明结合深度学习图像识别,提供一种根据连桩拍照巡护专业标准采集的图像数据,自动通过ai图像识别照片的方法识别管道周围影响管道运行安全的隐患;本发明通过对管道全线运行状况及周围环境的现状进行分析、评估,有效地查明危及管道安全的隐患的准确位置,为及时进行清除或限制在最小范围,预防事故发生等提供经济、有效的智能识别方法。
45、本发明基于人工智能管道周围环境隐患识别,对比人工识别来说,具有以下优点:
46、首先,对巡护、辨识人员的专业技能水平要求不高,人工成本低;其次系统让专业能力低的巡护人员按专业的标准规范现场采集图像数据,为深度学习的图像识别提供海量的数据,从而建立模型图像数据库,使这些数据能够得到持续的利用和保护;最后本发明能够去除人为因素影响,可在任何油气管道巡护现场连续不间断的识别管道周围环境隐患,识别准确度较高且系统使用及维护保养简单,维护费用低。
- 还没有人留言评论。精彩留言会获得点赞!