图像校准方法和数控机器、计算系统、存储介质与流程
本技术涉及激光加工,具体涉及一种图像校准方法和数控机器、计算系统、存储介质。
背景技术:
1、数控机器执行加工过程中,通过控制数控机器的执行机构,使得数控机器的执行机构发出激光,对加工对象进行加工。
2、在数控机器在出厂组装、运输或者使用的过程中,数控机器配置的用于测量的构件(例如摄像装置)往往会产生偏移,导致数控机器内设的摄像装置拍摄画面与数控机器中的加工幅面的对应关系出现误差,从而无法准确得到加工幅面中待加工材料的位置,难以对待加工材料进行精确加工。
技术实现思路
1、本技术旨在解决无法准确得到加工幅面中待加工材料的位置信息,难以对待加工材料进行精确加工的技术问题。
2、根据本技术实施例的一方面,本技术提供了一种图像校准方法,所述方法包括:
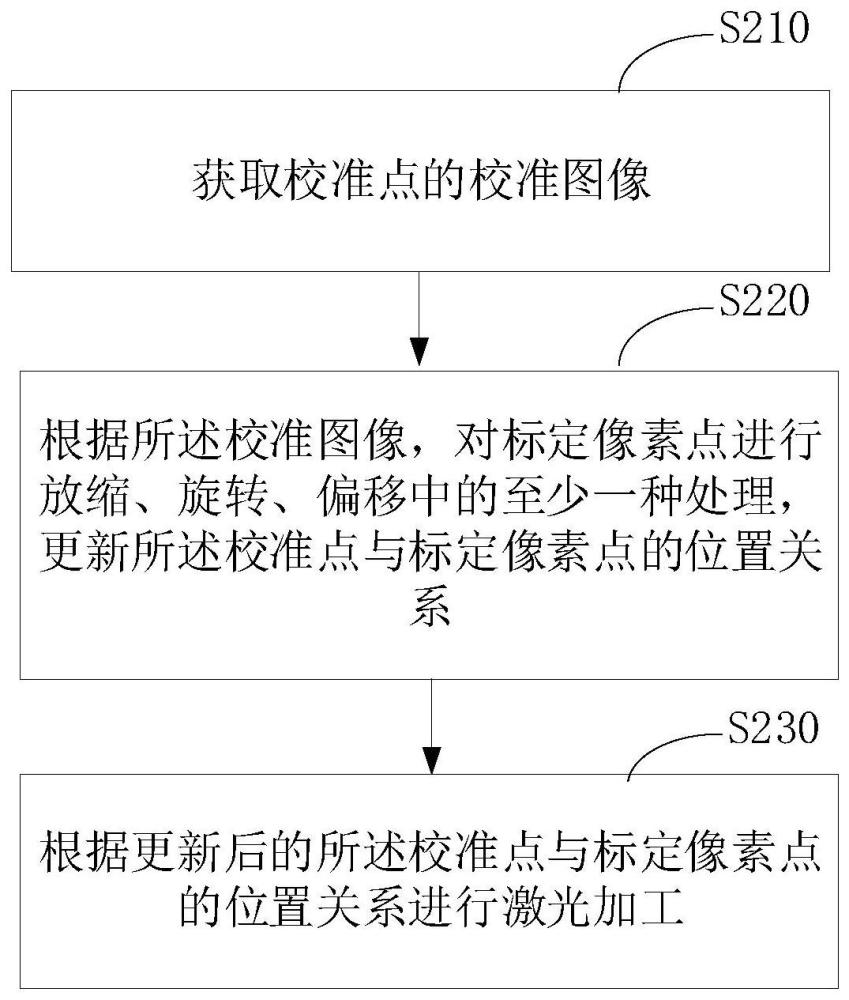
3、获取校准点的校准图像;
4、根据所述校准图像,对标定像素点进行放缩、旋转、偏移中的至少一种处理,更新所述校准点与标定像素点的位置关系;
5、根据更新后的所述校准点与标定像素点的位置关系进行激光加工。
6、根据本技术实施例的一方面,所述根据所述校准图像,对标定像素点进行放缩、旋转、偏移中的至少一种处理,包括:
7、根据所述校准图像,确定所述校准点在所述校准图像上映射的像素点的位置信息,所述像素点为至少一个;
8、将所述像素点的位置信息与所述校准点所对应的标定像素点的位置信息进行对比,得到至少一个误差数据;
9、根据所述误差数据对所述标定像素点的位置信息进行校正,得到所述标定像素点的校准位置信息。
10、根据本技术实施例的一方面,所述根据所述校准图像,确定所述校准点在所述校准图像上映射的像素点的位置信息,包括:
11、通过对校准图像进行阈值分割,以筛选校准图像中各校准点映射的像素点,得到符合阈值要求的筛选点;
12、生成由所述筛选点组成的若干筛选点阵,所述筛选点阵与校准点阵行列数相同;
13、在若干筛选点阵中寻找与校准点阵具备相同特征信息的筛选点阵,以所得筛选点阵中各筛选点为像素点形成像素点阵。
14、根据本技术实施例的一方面,所述误差数据包括放缩误差,所述将所述像素点的位置信息与所述校准点所对应的标定像素点的位置信息进行对比,得到至少一个误差数据,包括:
15、分别将每一所述像素点的位置信息与所述校准点所对应的所述标定像素点的位置信息进行对比,得到每一标定像素点对应的放缩比例,所述放缩比例的数量与所述标定像素点的数量相同;
16、分别使用每一所述放缩比例对所述标定像素点进行放缩,得到放缩后的标定像素点的位置信息;
17、根据放缩后的标定像素点与像素点之间的误差,确定最小误差对应的放缩比例,所述最小误差对应的放缩比例为所述放缩误差。
18、根据本技术实施例的一方面,所述标定像素点形成标定点阵,所述误差数据包括放缩误差,所述根据所述误差数据对所述标定像素点的位置信息进行校正,得到所述标定像素点的校准位置信息,包括:
19、寻找距离标定点阵的中心最近的标定像素点为放缩参照点;
20、根据所述放缩误差,确定相邻标定像素点之间的距离;
21、根据放缩参照点位置和相邻标定像素点之间的距离,依次确定其余标定像素点的校准位置信息。
22、根据本技术实施例的一方面,所述误差数据包括偏移误差,所述根据所述误差数据对所述标定像素点的位置信息进行校正,得到所述标定像素点的校准位置信息,包括:
23、根据所述偏移误差对所述标定像素点进行移动,得到所述标定像素点的校准位置信息。
24、根据本技术实施例的一方面,所述误差数据包括旋转误差,所述将所述像素点的位置信息与所述校准点所对应的标定像素点的位置信息进行对比,得到至少一个误差数据,包括:
25、以所述像素点阵的特定点为像素参照点,得到任一像素点的参照坐标;
26、以标定点阵的特定点为标定参照点,得到所述像素点对应的标定像素点的参照坐标;
27、根据所述像素点的参照坐标和所述标定像素点的参照坐标,计算得到所述标定像素点围绕所述标定参照点的旋转角度,作为所述旋转误差。
28、根据本技术实施例的一方面,所述误差数据包括旋转误差,所述根据所述误差数据对所述标定像素点的位置信息进行校正,得到所述标定像素点的校准位置信息,包括:
29、根据所述旋转误差,绕标定点阵的中心旋转所述标定像素点;
30、根据旋转后的标定像素点计算所述标定像素点的校准位置信息。
31、根据本技术实施例的一方面,所述根据更新后的所述校准点与标定像素点的位置关系进行激光加工,包括:
32、获取所述校准图像对应的当前加工高度;
33、将所述更新后的所述校准点与标定像素点的位置关系与所述当前加工高度建立映射关系;
34、根据待加工材料的目标加工高度与所述映射关系,确定所述目标加工高度上的点与标定像素点的位置关系;
35、根据所述目标加工高度上的点与标定像素点的位置关系对所述待加工材料进行加工。
36、根据本技术实施例的一方面,在所述更新所述校准点与标定像素点的位置关系之后,所述方法还包括:
37、在目标页面显示所述校准图像;
38、在所述目标页面的校准图像上显示辅助线,所述辅助线用于辅助用户放置待加工图案和/或待加工材料。
39、根据本技术实施例的一方面,所述获取校准点的校准图像,包括:
40、驱动工作空间内的第一位置的可移动头加工形成第一校准点,其中所述可移动头可滑动地设置于数控机器的滑轨上;
41、通过所述滑轨将所述可移动头移动到所述工作空间的第二位置,通过在所述第二位置的可移动头加工形成第二校准点;
42、通过所述工作空间内的摄像装置获取所述校准图像,其中所述摄像装置固定于所述数控机器上。
43、根据本技术实施例的一方面,其特征在于,所述数控机器包括壳体,所述壳体形成所述工作空间,所述壳体承载所述滑轨,所述可移动头通过所述滑轨在所述工作空间内移动以传递电磁能。
44、根据本技术实施例的一方面,本技术提供了一种数控机器,所述数控机器包括:
45、滑轨;
46、可移动头,所述可移动头可滑动地设置于所述滑轨上;
47、通信组件,所述通信组件用于接收上述任意一项所述的方法得到的所述激光加工信号;以及
48、控制器,所述控制器基于所述激光加工信号,控制所述可移动头在所述滑轨上移动以对待加工材料进行加工。
49、根据本技术实施例的一方面,本技术提供了一种计算系统,所述计算系统包括至少一个数控机器和至少一个处理器;
50、所述处理器用于执行上述任意一项所述的方法的步骤;
51、所述数控机器基于所述处理器得到的所述激光加工信号,将电磁能传送至布置在所述数控机器的内部的加工材料。
52、根据本技术实施例的一方面,本技术提供了一种计算机可读存储介质,其上存储有计算机可读指令,当所述计算机可读指令被计算机的处理器执行时,使计算机执行上述任一项所述的图像校准方法。
53、在本技术实施例进行的图像校准方法,首先获取校准点的校准图像;根据校准图像,对标定像素点进行放缩、旋转、偏移中的至少一种处理,更新校准点与标定像素点的位置关系,根据更新后的校准点与标定像素点的位置关系进行激光加工,由此,即可通过对校准点所映射的像素点和标定像素点直接的位置进行比较,明确标定像素点存在的误差,并以此为依据更新校准点与标定像素点的位置关系,减少误差,有助于缓解数控机器标定关系出现误差导致数控机器加工精度下降的问题,可以准确得到加工幅面中待加工材料的位置信息,对待加工材料进行精确加工。
54、本技术的其他特性和优点将通过下面的详细描述变得显然,或部分地通过本技术的实践而习得。
55、应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!