一种基于图像分析的环保设备运维行为分析方法及系统与流程
本发明涉及环保设备运维,尤其涉及一种基于图像分析的环保设备运维行为分析方法及系统。
背景技术:
1、企业应用环保设备的作用在当今社会变得愈发重要,这反映了企业对可持续经营和环境保护的责任感;环保设备的应用不仅有助于企业降低环境影响,同时也为其提供了多方面的益处。
2、随着环保设备在企业中的广泛应用,环保部门采用的传统上门来对设备运维状态进行检查的方式显得效率低下且成本较高,为了解决这一问题,亟需一种能够代替人工上门检查的环保设备运维情况检查方法和系统。
技术实现思路
1、本发明的目的是提供一种能够代替人工上门检查的环保设备运维情况检查方法和系统。
2、本发明公开了一种基于图像分析的环保设备运维行为分析方法,包括:
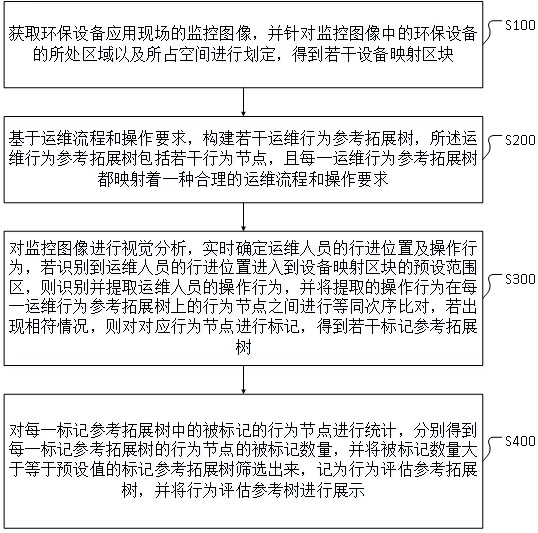
3、获取环保设备应用现场的监控图像,并针对监控图像中的环保设备的所处区域以及所占空间进行划定,得到若干设备映射区块;
4、基于运维流程和操作要求,构建若干运维行为参考拓展树,所述运维行为参考拓展树包括若干行为节点,且每一运维行为参考拓展树都映射着一种合理的运维流程和操作要求;
5、对监控图像进行视觉分析,实时确定运维人员的行进位置及操作行为,若识别到运维人员的行进位置进入到设备映射区块的预设范围区,则识别并提取运维人员的操作行为,并将提取的操作行为在每一运维行为参考拓展树上的行为节点之间进行等同次序比对,若出现相符情况,则对对应行为节点进行标记,得到若干标记参考拓展树;
6、对每一标记参考拓展树中的被标记的行为节点进行统计,分别得到每一标记参考拓展树的行为节点的被标记数量,并将被标记数量大于等于预设值的标记参考拓展树筛选出来,记为行为评估参考拓展树,并将行为评估参考树进行展示。
7、在本发明公开的一些实施例中,基于图像分析的环保设备运维行为分析方法还包括:
8、对行为评估参考树产生的问题结果进行演化推测,并将问题结果与行为评估参考树进行标记后组合生成行为评估参考树集;
9、将展示的行为评估参考树代入行为评估参考树集,确定出运维人员运维行为带来的问题结果,并基于问题结果的严重程度进行报警。
10、在本发明公开的一些实施例中,实时确定运维人员的行进位置的方法包括:
11、利用深度学习目标检测模型确定监控图像中的存在的人员,并利用人脸识别模型识别运维人员的身份或基于运维工作登记的信息确定运维人员的身份;
12、针对监控图像建立定位坐标系,并基于定位坐标系对每一设备映射区块的预设关注点配置关注点定位坐标,并对每一设备映射区块的预设范围区配置第一区块定位坐标范围;
13、基于定位坐标系,对识别到的运维人员配置人员定位坐标,若人员定位坐标出现在第一区块定位坐标范围内,且在第一预设监控时间段内出现的时间大于等于第二预设监控时间段,则认定运维人员有效进入对应设备映射区块的作业范围区。
14、在本发明公开的一些实施例中,识别并提取运维人员的操作行为的方法包括:
15、针对每一设备映射区块上对应环保设备的操作部分进行划定,得到若干操作区块,并基于定位坐标系对每一操作区块配置第二区块定位坐标范围;
16、利用行为识别模型来对运维人员的手部进行运动定位,得到手部定位坐标,并将手部定位坐标与对应的第二定位坐标范围进行相对位置分析,确定出实时手部相对位置表现;
17、基于实时手部相对位置表现确定操作行为的可信度,若可信度大于等于预设值,则认定对应的操作行为有效。
18、在本发明公开的一些实施例中,确定出实时手部相对位置表现的方法包括:
19、基于对环保设备实际操作行为的特征,对第二定位坐标范围进行区块划分,得到若干第二子定位坐标范围,并针对每一第二子定位坐标范围配置标准持续时间;
20、确定手部定位坐标相对每一第二子定位坐标范围内的实际持续时间以及进入不同第二子定位坐标范围的实际进入次序;
21、依据不同第二定位坐标范围的实际进入次序,对手部定位坐标进入的第二定位坐标范围进行排序,得到第二定位坐标范围实际进入序列,并将第二定位坐标范围实际进入序列和第二定位坐标范围标准进入序列进行比对,确定出二者的顺序相符次数;
22、基于手持定位坐标相对每一第二子定位坐标范围的实际持续时间,以及第二定位坐标范围实际进入序列和第二定位坐标范围标准进入序列的顺序相符次数,得到实时手部相对位置表现。
23、在本发明公开的一些实施例中,计算可信度的表达式为:
24、;
25、其中,为可信度对应值,为第一可信度权重调整系数,为第二可信度权重调整系数,为手部定位坐标进入第i个第二子定位坐标范围内的实际持续时间,为第i个第二子定位坐标范围对应的标准持续时间区间,表达了手部定位坐标进入第i个第二子定位坐标范围内的实际持续时间属于标准持续时间区间,表达了手部定位坐标进入第i个第二子定位坐标范围内的实际持续时间不属于标准持续时间区间,为持续时间判断函数,若手部定位坐标进入第i个第二子定位坐标范围内的实际持续时间属于标准持续时间区间,则输出1,若手部定位坐标进入第i个第二子定位坐标范围内的实际持续时间不属于标准持续时间区间,则输出0,为第一可信度调整常数,为第二可信度调整常数,为第二定位坐标范围实际进入序列和第二定位坐标范围标准进入序列的顺序相符次数。
26、在本发明公开的一些实施例中,确定监控图像中人员的方法还包括:
27、截取无人时期的监控图像进行灰度化,得到比对用灰度监控图像;
28、将实时采集的监控图像进行灰度化,得到实时灰度监控图像,并将实时灰度监控图像和比对用会灰度监控图像进行比对,得到灰度比对结果;
29、基于灰度比对结果,确定实时灰度监控图像上灰度差异大于等于预设值的人员映射区域,并基于定位坐标系,对人员映射区域进行坐标平均计算,得到人员定位坐标。
30、在本发明公开的一些实施例中,对监控图像中运维人员的进行运动定位的方法包括:
31、将人员映射区域中到达第二定位坐标范围的端头部分认定为手部映射区域,并对手部映射区域进行坐标平均计算,得到手部定位坐标。
32、在本发明公开的一些实施例中,将实时灰度监控图像和比对用会灰度监控图像进行比对的方法包括:
33、针对灰度监控图像均匀设定有若干灰度探点,并计算实时灰度监控图像和比对用灰度监控图像在等同灰度探点位置的灰度差异值,并将灰度差异值和灰度探点关联;
34、将灰度差异值大于等于预设值的灰度探点进行归总,得到用于表达人员映射区域的探点阵列。
35、在本发明公开的一些实施例中,还公开了一种基于图像分析的环保设备运维行为分析系统,包括:
36、第一模块,用于获取环保设备应用现场的监控图像,并针对监控图像中的环保设备的所处区域以及所占空间进行划定,得到若干设备映射区块;
37、第二模块,用于基于运维流程和操作要求,构建若干运维行为参考拓展树,所述运维行为参考拓展树包括若干行为节点,且每一运维行为参考拓展树都映射着一种合理的运维流程和操作要求;
38、第三模块,用于对监控图像进行视觉分析,实时确定运维人员的行进位置及操作行为,若识别到运维人员的行进位置进入到设备映射区块的预设范围区,则识别并提取运维人员的操作行为,并将提取的操作行为在每一运维行为参考拓展树上的行为节点之间进行等同次序比对,若出现相符情况,则对对应行为节点进行标记,得到若干标记参考拓展树;
39、第四模块,用于对每一标记参考拓展树中的被标记的行为节点进行统计,分别得到每一标记参考拓展树的行为节点的被标记数量,并将被标记数量大于等于预设值的标记参考拓展树筛选出来,记为行为评估参考拓展树,并将行为评估参考树进行展示。
40、本发明公开了一种基于图像分析的环保设备运维行为分析方法及系统,涉及环保设备运维技术领域,具体公开了基于运维流程和操作要求,构建若干运维行为参考拓展树,将提取的操作行为在每一运维行为参考拓展树上的行为节点之间进行等同次序比对,若出现相符情况,则对对应行为节点进行标记,得到若干标记参考拓展树,将被标记数量大于或大于等于预设值的标记参考拓展树筛选出来,记为行为评估参考拓展树,并将行为评估参考树进行展示,本发明通过上述技术方案实现了利用监控图像对运维人员的运维行为的判断,并通过评估参考拓展树的展示方式,高效的表达出了相关环保设备的运维异常等情况,相比较人工上门检查效率更高,且成本更低。
- 还没有人留言评论。精彩留言会获得点赞!