植、介入性管状器械的内壁质量检测方法及装置与流程
本发明涉及人工血管的图像检测,尤其涉及一种植、介入性管状器械的内壁质量检测方法及装置。
背景技术:
1、植、介入性管状器械是一类用于在体内进行植、介入性手术或检查的医疗器械,通常由柔软的管道或导管组成,可以在不同组织中进行操作。例如,植、介入性管状器械可以是用于体内组织的导管、鞘管、人工血管、神经修复导管、心血管支架、消化道支架等。
2、由于人工血管这一类管状器械的尺寸较小,其直径也较小,而像心血管支架这一类产品,其尺寸更小,支架直径仅在6mm以内。在使用制造设备如3d打印设备以及静电纺丝设备等制造完成管状器械植、介入性管状器械后,管状器械植、介入性管状器械内壁的缺陷难以被人眼直接明确地发现,难以对生产的产品进行高效的外观质量检查,不利于进行产品质量评估。
技术实现思路
1、本发明提供一种植、介入性管状器械的内壁质量检测方法及装置,用以解决现有技术中管状器械由于尺寸的限制难以高效地进行内壁质量检查的缺陷,实现方便而又快速地对管状器械内壁进行质量检查的效果。
2、本发明提供一种植、介入性管状器械的内壁质量检测方法,包括:
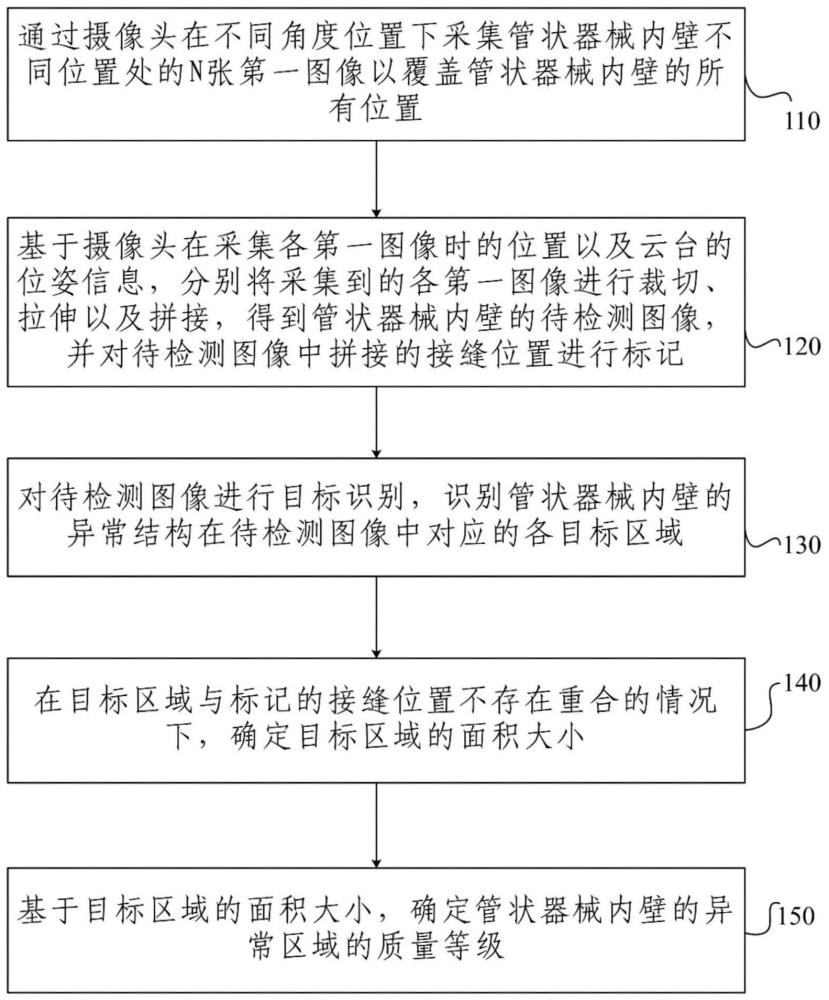
3、通过摄像头在不同角度位置下采集管状器械内壁不同位置处的n张第一图像以覆盖所述管状器械内壁的所有位置;所述管状器械设置于检测筒内,所述管状器械的外壁与所述检测筒的内壁贴合,所述摄像头设置于所述检测筒的至少一端以获取所述检测筒内部的图像;所述摄像头安装于云台,所述云台用于调整所述摄像头的拍摄角度以获取所述检测筒内部不同位置处的图像;n为大于1的正整数;
4、基于所述摄像头在采集各第一图像时的位置以及所述云台的位姿信息,分别将采集到的各第一图像进行裁切、拉伸以及拼接,得到所述管状器械内壁的待检测图像,并对所述待检测图像中拼接的接缝位置进行标记;
5、对所述待检测图像进行目标识别,识别所述管状器械内壁的异常结构在所述待检测图像中对应的各目标区域;所述异常结构包括所述管状器械内壁的凸点、凹陷、缺失、结团以及残丝中的至少一种;
6、在所述目标区域与标记的所述接缝位置不存在重合的情况下,确定所述目标区域的面积大小;
7、基于所述目标区域的面积大小,确定所述管状器械内壁的异常区域的质量等级。
8、根据本发明提供的一种植、介入性管状器械的内壁质量检测方法,在对所述待检测图像进行目标识别,识别所述管状器械内壁的异常结构在所述待检测图像中对应的各目标区域之后,所述方法还包括:
9、在所述目标区域与标记的所述接缝位置存在重合的情况下,调整所述云台的位姿信息,并通过所述摄像头在不同角度位置下采集管状器械内壁的m张第二图像,以使得所述目标区域位于所述第二图像的中心位置;m为正整数;
10、将所述第二图像进行裁切并拉伸,得到所述管状器械内壁的补充检测图像;
11、对所述补充检测图像进行目标识别,识别所述管状器械内壁的异常区域在所述补充检测图像中对应的目标区域;
12、基于所述目标区域的面积大小,确定所述管状器械内壁的异常区域的质量等级。
13、根据本发明提供的一种植、介入性管状器械的内壁质量检测方法,所述通过摄像头在不同角度位置下采集管状器械内壁不同位置处的n张第一图像以覆盖所述管状器械内壁的所有位置,包括:
14、确定所述管状器械在被制造的轴上的残留痕迹对应的区域位置以及所述管状器械在被制造时的起始点区域位置;
15、基于所述残留痕迹对应的区域位置以及所述起始点区域位置,确定所述云台在所述摄像头采集n张第一图像时分别对应的目标位姿,以使得所述残留痕迹对应的区域位置以及所述起始点区域位置不位于第一图像的边缘位置;
16、在所述云台于所述目标位姿下通过所述摄像头采集所述管状器械内壁不同位置处的n张第一图像。
17、根据本发明提供的一种植、介入性管状器械的内壁质量检测方法,所述基于所述摄像头在采集各第一图像时的位置以及所述云台的位姿信息,分别将采集到的各第一图像进行裁切、拉伸以及拼接,包括:
18、通过边缘检测算法识别各第一图像中所述管状器械内壁对应的区域;
19、将所述各第一图像中所述管状器械内壁对应的区域进行裁切,并对相邻的第一图像中的特征点进行匹配;
20、根据特征点的匹配结果,利用几何变换模型计算不同第一图像之间的重叠区域;
21、根据计算得到的重叠区域,将相邻的第一图像中的一个重叠区域进行掩模操作,以消除重叠区域;
22、对去除重叠区域后的各第一图像进行拉伸变换,并对经过拉伸变换后的图像进行拼接。
23、根据本发明提供的一种植、介入性管状器械的内壁质量检测方法,在对所述待检测图像进行目标识别,识别所述管状器械内壁的异常结构在所述待检测图像中对应的各目标区域之后,所述方法还包括:
24、确定所述目标区域在拉伸过程中的拉伸因子;
25、在所述拉伸因子大于拉伸阈值的情况下,通过位于所述管状器械的另一端的摄像头获取所述目标区域的第三图像;
26、将所述第三图像进行裁切并拉伸,得到所述管状器械内壁的补充检测图像;
27、对所述补充检测图像进行目标识别,识别所述管状器械内壁的异常结构在所述补充检测图像中对应的目标区域;
28、基于所述目标区域的面积大小,确定所述管状器械内壁的异常区域的质量等级。
29、根据本发明提供的一种植、介入性管状器械的内壁质量检测方法,在所述管状器械的长度大于长度阈值的情况下,所述通过摄像头在不同角度位置下采集管状器械内壁不同位置处的n张第一图像以覆盖所述管状器械内壁的所有位置,包括:
30、通过位于管状器械两端的两个摄像头在不同角度位置下采集管状器械内壁不同位置处的n张第一图像以覆盖所述管状器械内壁的所有位置。
31、根据本发明提供的一种植、介入性管状器械的内壁质量检测方法,对所述待检测图像进行目标识别,识别所述管状器械内壁的异常结构在所述待检测图像中对应的各目标区域,包括:
32、将所述待检测图像输入至目标检测模型,所述目标检测模型是以历史图像集合中的历史图像为样本、历史图像中的异常结构所对应的区域为标签训练得到的;所述历史图像集合是预先收集的包括异常结构的管状器械内壁图像的集合;
33、得到所述目标检测模型输出的对待检测图像中管状器械内壁的异常结构对应的各目标区域。
34、本发明还提供一种植、介入性管状器械的内壁质量检测装置,包括:
35、采集模块,用于通过摄像头在不同角度位置下采集管状器械内壁不同位置处的n张第一图像以覆盖所述管状器械内壁的所有位置;所述管状器械设置于检测筒内,所述管状器械的外壁与所述检测筒的内壁贴合,所述摄像头设置于所述检测筒的至少一端以获取所述检测筒内部的图像;所述摄像头安装于云台,所述云台用于调整所述摄像头的拍摄角度以获取所述检测筒内部不同位置处的图像;n为大于1的正整数;
36、第一处理模块,用于基于所述摄像头在采集各第一图像时的位置以及所述云台的位姿信息,分别将采集到的各第一图像进行裁切、拉伸以及拼接,得到所述管状器械内壁的待检测图像,并对所述待检测图像中拼接的接缝位置进行标记;
37、第二处理模块,用于对所述待检测图像进行目标识别,识别所述管状器械内壁的异常结构在所述待检测图像中对应的各目标区域;所述异常结构包括所述管状器械内壁的凸点、凹陷、缺失、结团以及残丝中的至少一种;
38、第三处理模块,用于在所述目标区域与标记的所述接缝位置不存在重合的情况下,确定所述目标区域的面积大小;
39、第四处理模块,用于基于所述目标区域的面积大小,确定所述管状器械内壁的异常区域的质量等级。
40、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述植、介入性管状器械的内壁质量检测方法。
41、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述植、介入性管状器械的内壁质量检测方法。
42、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述植、介入性管状器械的内壁质量检测方法。
43、本发明提供的植、介入性管状器械的内壁质量检测方法及装置,通过摄像头在不同角度位置下采集管状器械内壁不同位置处的n张第一图像,可以覆盖所述管状器械内壁的所有位置,进而再将这些第一图像进行图像处理后转化为用于进行异常结构检测的待检测图像,在排除接缝位置对检测结果的影响的情况下,根据目标识别结果自动判断图像的质量等级,实现了对小尺寸的管状器械的内壁的方便而又快速的质量检查,保证了检测效率和准确性。
- 还没有人留言评论。精彩留言会获得点赞!