一种融合双向粒子群和多策略蚁群的机场联合调度方法
本发明涉及机场场面资源调度,具体涉及一种融合双向粒子群和多策略蚁群的机场联合调度方法。
背景技术:
1、联合调度方法是指在多资源系统中,综合考虑不同资源和任务的相互作用和依赖关系,以实现最优的资源利用和任务完成效率的方法。其中,跑道和滑行道联合调度是指在机场运行中,对跑道和滑行道进行协同管理和调度的一种方法。它旨在最大限度地提高跑道和滑行道的利用效率,确保飞机的安全起降和地面滑行。此类问题存在调度约束复杂、资源的限制和现实环境复杂等特点。高效合理地对跑道和滑行道进行联合调度对于提高场面资源运营效率,提升旅客满意度具有重要意义。
2、目前,研究重点集中在跑道和滑行道联合调度问题的优化目标和求解方法。这些研究致力于确定最佳调度方案,以最大程度地减少航班延误和滑行时间,并确保安全运行。求解方法主要分为数学规划方法和启发式算法两类。尽管数学规划方法有着广泛的应用,但由于跑道和滑行道联合调度问题规模较大和约束条件较多,使用数学规划方法会面临复杂性高、精确性受影响和可扩展性不足等挑战。与传统的数学规划方法不同,启发式算法不追求找到最优解,而是通过一系列的规则、策略和启发性信息,逐步搜索问题空间并寻找较好的解决方案。此外,启发式算法还具有可灵活调整的特性,可以根据问题的特点和需求进行参数的调整或算法的改进,并在求解过程中进行优化,这使得启发式算法在实际应用中具有较高的效率和可行性。
技术实现思路
1、本发明针对现有技术存在的问题提供一种融合双向粒子群和多策略蚁群的机场联合调度方法。
2、本发明采用的技术方案是:
3、一种融合双向粒子群和多策略蚁群的机场联合调度方法,包括以下步骤:
4、步骤1:获取机场和进离场航班数据;
5、步骤2:以最小化航班延误为目标函数构建跑道调度模型;以最小化航班的总滑行时间为目标函数构建滑行道调度模型;
6、步骤3:采用融合双向粒子群和多策略蚁群方法对跑道调度模型和滑行道调度模型进行求解;得到最优解即为所需联合调度方案;
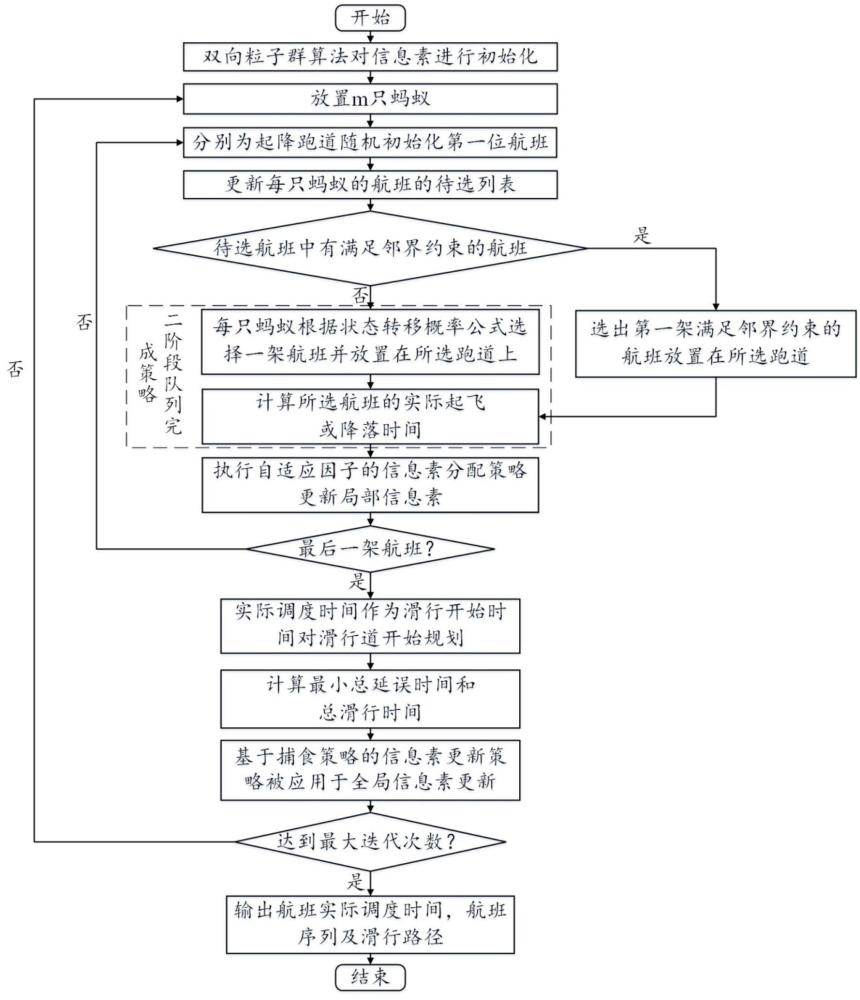
7、其中融合双向粒子群和多策略蚁群方法求解过程如下:
8、s1:随机生成初始化种群,设置参数;
9、s2:采用双向粒子群算法对信息素进行初始化;
10、s3:对每个航班计算转移概率,选择概率最大的航班作为下一个航班,构建蚁群算法的解空间;
11、s4:采用二阶段队列方法求解跑道队列的实际调度时间;
12、s5:定义蚁群信息素模型,引入自适应因子对信息素进行分配,得到跑道调度的航班序列;
13、s6:对信息素进行更新,得到最优滑行路径;
14、s7:迭代s4~s6,满足迭代次数即可得到所需联合调度方案。
15、进一步的,所述步骤1中的进离场航班数据包括航班号、航班计划调度时间、航班的类型和计划载客数。
16、进一步的,所述跑道调度模型的约束条件如下:
17、最早开始使用跑道时间约束即航班对跑道最早实际使用时间应大于等于计划使用时间;
18、最晚使用跑道时间约束即航班对跑道的实际使用时间应不晚于计划最晚使用时间。
19、进一步的,所述滑行道调度模型的约束条件如下:
20、独占约束即对于同一滑行路径的相同节点,在某一时刻只有一个航班到达;
21、滑行道弧节点顺序约束即对于同一弧段,不同航班顺序通过。
22、进一步的,所述步骤s3中转移概率的计算方法如下:
23、
24、式中:为最近已被访问航班 δ与未被访问航班之间的转移概率,为最近已被访问航班 δ与未被访问航班之间的信息素,为最近已被访问航班 δ与未被访问航班之间的安全距离和计划调度时间之积的倒数,为最近已被访问航班 δ与未被访问航班 k之间的信息素,为最近已被访问航班 δ与未被访问航班 k之间的安全距离和计划调度时间之积的倒数, unvisited为未被访问的航班集合, δ、、 k为航班序列号, α为信息素因子, β为启发式参数。
25、进一步的,所述步骤s5中信息素模型如下:
26、
27、式中: q为常数, lk为第 k只蚂蚁经过路径的长度,为第 k只蚂蚁从城市 i访问城市 j的过程中所释放的信息素。
28、进一步的,所述步骤s5中引入自适应因子对信息素进行分配,具体为建立局部信息素浓度和局部信息素浓度变化量的非线性关系:
29、
30、式中:式中:为第 g+1次迭代第 m只蚂蚁在航班 α和航班 β之间的信息素浓度, g为当前迭代次数, m为蚂蚁序号, e( g)为自适应因子,为第 g次迭代航班 α和航班 β之间的信息素浓度变化量,为第 g次迭代第 m只蚂蚁在航班 α和航班 β之间的信息素浓度, rho为信息素波动因素。
31、进一步的,所述步骤s6中信息素更新方法如下:
32、
33、式中:为两个相邻点 α和 β第 g次迭代在路径 p上的信息素变化,为两个相邻点 α和 β第 g次迭代在路径 q上的信息素变化。
34、进一步的,所述步骤s4中二阶段队列方法求解方法如下:
35、第一阶段,根据航班计划调度时间计算转移概率,根据转移概率对跑道上的航班进行排序,将搜索得到的航班序列传递给第二阶段;
36、第二阶段,根据计划调度时间更新队列完成时间,从序列的第二个位置开始,判断当前航班 ζ的计划调度时间与前一个航班实际调度时间之差是否满足二者在跑道上的安全距离;若满足,则的实际调度时间为其计划调度时间和附加时间之和;若不满足,则的实际调度时间为与前后两个航班的安全距离和附加时间之和;
37、更新得到跑道上航班实际调度时间和航班排序序列。
38、进一步的,所述第二阶段中更新队列完成时间过程如下:
39、
40、式中:为航班和之间的安全距离,为附加时间,为跑道。
41、本发明的有益效果是:
42、(1)本发明采用基于双向粒子群算法对传统蚁群算法的初始信息素分布特性做出优化,加速了算法的收敛;
43、(2)本发明引入自适应因子对信息素进行分配,可以避免算法陷入局部最优,提高全局搜索能力;
44、(3)本发明提供一种二阶段队列完成方法,减小实际调度时间与计划调度时间的误差,提高机场运营效率和旅客满意度;
45、(4)本发明有效解决了多约束复杂优化问题,实现最优的跑道和滑行道的利用。
- 还没有人留言评论。精彩留言会获得点赞!