一种加能站设备碰撞事故识别方法、装置、设备及介质与流程
本技术属于图像处理,特别是涉及一种加能站设备碰撞事故识别方法、装置、设备及介质。
背景技术:
1、目前,车辆冲撞设备交通事故的识别方案主要从多模态三维模型共同判定的,主要是双目、激光雷达、雷达等共同判定车辆三维空间结构的,现有的技术方案对硬件设施的要求很高,在硬件的调试、设计和花费成本上是不可估计的,在对于每种模态的训练工作上都要结合复杂的雷达、摄像点位数据信息和各个摄像头的内置参数信息,多模态三维模型的完美融合也十分具有挑战性,总的来说在项目的软件研发上的周期过长、成本过高。
2、所以,目前亟需一种设备碰撞识别方法,可以结合加能站(例如加液站、油气站、充电站等)、危化园等能源领域的环境特点,在不增设硬件设备的情况下,结合可以直接部署在现有监控设备中的特征目标检测模型,来对监控图像进行特征目标提取以及目标图像数据的后处理的逻辑判断,以完成对设备碰撞事故的实时识别,并消除对硬件设备的高要求,避免了对双目、雷达等复杂空间信息、硬件设备信息的收集处理,更无需开发复杂的大模型和融合技术。
技术实现思路
1、本技术提供一种加能站(例如加液站、油气站、充电站等)、危化园设备碰撞事故识别方法、装置、设备及介质,旨在解决如何基于现有监控设备环境进行碰撞实时识别的问题。
2、依据本技术的第一方面,提供了一种加能站(例如加液站、油气站、充电站等)、危化园设备碰撞事故识别方法,包括:
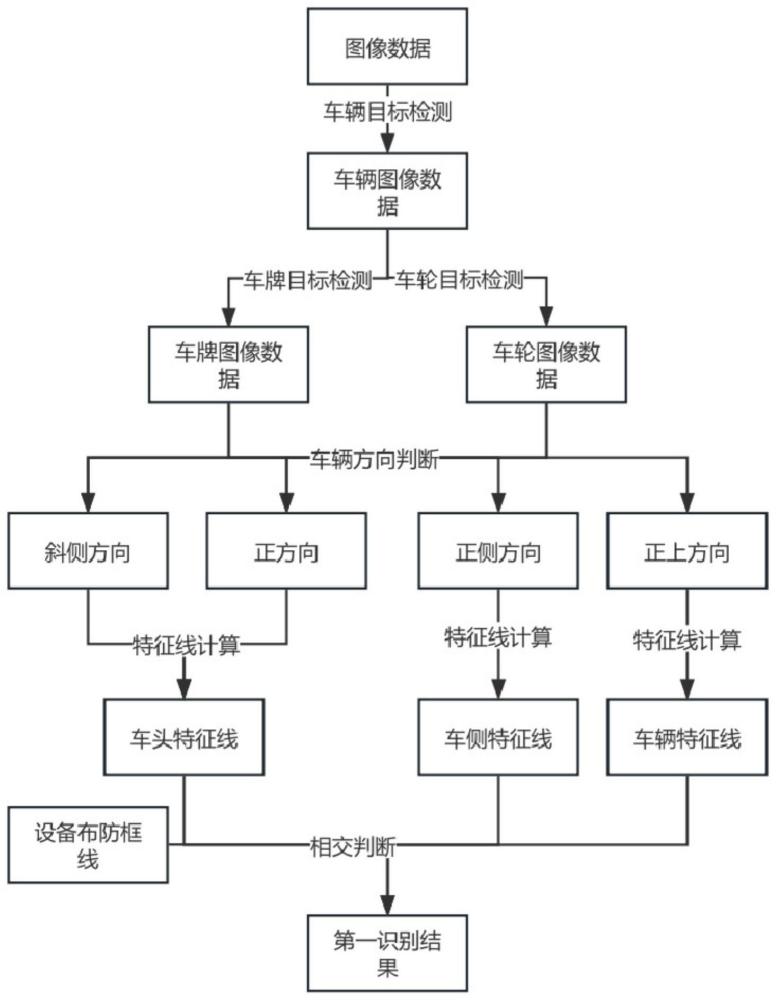
3、获取图像数据,对所述图像数据中的车辆进行目标检测,得到目标图像数据,所述目标图像数据至少包括以下一种:车牌图像数据和车轮图像数据;
4、依据所述车牌图像数据和所述车轮图像数据的数量,确定所述目标图像数据的车辆方向;
5、依据所述车辆方向对应的目标图像数据,获取所述车辆的特征点位置信息,并依据所述特征点位置信息,得到所述车辆在所述车辆方向下对应的第一等效投影图形;
6、对所述第一等效投影图形与所述图像数据中的第二等效投影图形进行相交判断,在所述第一等效投影图形和所述第二等效投影图形相交的情况下,输出第一识别结果,所述第一识别结果为车辆与设备已经发生碰撞事故,所述第二等效投影图形为油气站设备布防框线。
7、可选地,所述依据所述车牌图像数据和所述车轮图像数据的数量,确定所述目标图像数据的车辆方向,包括:
8、对所述目标图像数据中的车牌图像数据和车轮图像数据进行分析,得到车牌目标数量和车轮目标数量;
9、将所述车牌目标数量与第一阈值进行比较,得到第一判断结果,所述第一阈值为预设的车牌目标数量,所述预设的车牌目标数量为一个;
10、将所述车轮目标数量与第二阈值进行比较,得到第二判断结果,所述第二阈值为预设的车轮目标数量,所述预设的车轮目标数量为两个;
11、依据所述第一判断结果和所述第二判断结果对车辆方向进行判断,得到所述车辆方向。
12、可选地,所述依据所述第一判断结果和所述第二判断结果对车辆方向进行判断,得到所述车辆方向,包括:
13、当所述第一判断结果为所述车牌目标数量等于所述第一阈值,所述第二判断结果为所述车轮目标数量等于所述第二阈值时,所述车辆方向为斜侧方向;
14、当所述第一判断结果为所述车牌目标数量等于所述第一阈值,所述第二判断结果为所述车轮目标数量小于所述第二阈值时,所述车辆方向为正方向;
15、当所述第一判断结果为所述车牌目标数量小于所述第一阈值,所述第二判断结果为所述车轮目标数量等于所述第二阈值时,所述车辆方向为正侧方向;
16、当所述第一判断结果为所述车牌目标数量小于所述第一阈值,所述第二判断结果为所述车轮目标数量小于所述第二阈值时,所述车辆方向为正上方向。
17、可选地,在所述车辆方向为第一类型方向的情况下,所述依据所述车辆方向对应的目标图像数据,获取所述车辆的特征点位置信息,并依据所述特征点位置信息,得到所述车辆在所述车辆方向下对应的第一等效投影图形,包括:
18、基于所述车牌图像数据和所述车轮图像数据,得到车牌特征点坐标信息,所述车牌特征点坐标信息至少包括所述车牌图像的顶点坐标信息,所述第一类型方向包括斜侧方向和正方向;
19、依据所述车牌图像的顶点坐标信息,得到车牌等效中点的坐标信息,将所述车牌等效中点进行连接并按照第一预设倍数进行延长,得到车头特征线,作为所述第一类型方向下对应的第一等效投影图形。
20、可选地,在所述车辆方向为第二类型方向的情况下,所述依据所述车辆方向对应的目标图像数据,获取所述车辆的特征点位置信息,并依据所述特征点位置信息,得到所述车辆在所述车辆方向下对应的第一等效投影图形,包括:
21、基于所述车牌图像数据和所述车轮图像数据,得到车轮特征点坐标信息,所述车轮特征点坐标信息至少包括所述车轮图像的顶点坐标信息,所述第二类型方向为正侧方向;
22、依据所述车轮图像的顶点坐标信息,得到车轮等效中点的坐标信息,将所述车轮等效中点进行连接并按照第二预设倍数进行延长,得到车侧特征线,作为所述第二类型方向下对应的第一等效投影图形。
23、可选地,在所述车辆方向为第三类型方向的情况下,所述依据所述车辆方向对应的目标图像数据,获取所述车辆的特征点位置信息,并依据所述特征点位置信息,得到所述车辆在所述车辆方向下对应的第一等效投影图形,包括:
24、基于所述目标图像数据,得到车辆特征点坐标信息,所述车辆特征点坐标信息至少包括车辆图像的顶点坐标信息,所述第三类型方向为正上方向;
25、依据所述车辆图像的顶点坐标信息,将所述车辆图像的顶点进行连接,得到车辆特征线,作为所述第三类型方向下对应的第一等效投影图形。
26、可选地,所述对所述第一等效投影图形与所述图像数据中的第二等效投影图形进行相交判断,在所述第一等效投影图形和所述第二等效投影图形相交的情况下,输出第一识别结果,所述第一识别结果为车辆与设备已经发生碰撞事故,所述第二等效投影图形为油气站设备布防框线,包括:
27、获取所述第一等效投影图形对应的第一坐标信息,所述第一坐标信息为所述第一等效投影图形中各个像素点在所述图像数据中的坐标值;
28、获取所述第二等效投影图形对应的第二坐标信息,所述第二坐标信息为所述第二等效投影图形中各个像素点在所述图像数据中的坐标值;
29、对所述第一坐标信息和所述第二坐标信息进行比较,当所述第一等效投影图形和所述第二等效投影图形中具有坐标值相同的像素点时,认定所述第一等效投影图形和所述第二等效投影图形相交,输出所述第一识别结果。
30、依据本技术的第二方面,提供了一种加能站(例如加液站、油气站、充电站等)、危化园设备碰撞事故识别装置,该装置可以包括:
31、获取模块,用于获取图像数据,对所述图像数据中的车辆进行目标检测,得到目标图像数据,所述目标图像数据至少包括以下一种:车牌图像数据和车轮图像数据;
32、第一判断模块,用于依据所述车牌图像数据和所述车轮图像数据的数量,确定所述目标图像数据的车辆方向;
33、计算模块,用于依据所述车辆方向对应的目标图像数据,获取所述车辆的特征点位置信息,并依据所述特征点位置信息,得到所述车辆在所述车辆方向下对应的第一等效投影图形;
34、第二判断模块,用于对所述第一等效投影图形与所述图像数据中的第二等效投影图形进行相交判断,在所述第一等效投影图形和所述第二等效投影图形相交的情况下,输出第一识别结果,所述第一识别结果为车辆与设备已经发生碰撞事故,所述第二等效投影图形为油气站设备布防框线。
35、第三方面,本技术实施例提供了一种电子设备,所述电子设备包括:
36、存储器,用于存储程序指令;
37、处理器,用于调用所述存储器中存储的程序指令,按照获得的程序指令执行如第一方面所述的加能站(例如加液站、油气站、充电站等)、危化园设备碰撞事故识别方法中包括的步骤。
38、第四方面,本技术实施例提供了一种计算机存储介质,其特征在于,所述计算机存储介质上存储程序指令,所述程序指令被处理器执行时实现如第一方面所述的加能站(例如加液站、油气站、充电站等)、危化园设备碰撞事故识别方法中包括的步骤。
39、针对在先技术,本技术具备如下优点:
40、本技术提供了一种加能站(例如加液站、油气站、充电站等)、危化园储设备碰撞事故识别方法、装置、设备及介质,涉及图像处理技术领域,包括:对图像数据中的车辆进行目标检测,得到目标图像数据,先依据目标图像数据中的车牌图像数据和所述车轮图像数据的数量,确定车辆方向,再依据车辆方向对应的目标图像数据,得到车辆在车辆方向下对应的第一等效投影图形,最后对第一等效投影图形与第二等效投影图形进行相交判断,输出第一识别结果。本技术具有如下有益效果:
41、本技术适合广泛应用于不同环境的监控设备上,无需对监控的角度和内部参数进行标准化要求或提供给训练、推理深度模型作为基础数据,更无需增加雷达、双目等3d技术必备的硬件产品。我们将通过深度学习模型和对于车辆各个方位的逻辑计算处理判断,估计出车辆冲撞设备有效的3d计算区域,并进行简单的业务逻辑判断就可以完成实时、精准的事故判断。可以在事故发生的第一时间进行预警和记录,可以大力避免事故带来的巨大负面影响。
42、上述说明仅是本技术技术方案的概述,为了能够更清楚了解本技术的技术手段,而可依照说明书的内容予以实施,并且为了让本技术的上述和其它目的、特征和优点能够更明显易懂,以下特举本技术的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!