一种基于局部背景光的水下非均匀光图像增强方法和系统
本技术属于图像增强,更具体地,涉及一种基于局部背景光的水下非均匀光图像增强方法和系统。
背景技术:
1、在水下机器人进行水下作业过程中,随着其下潜深度的增大,大气环境光被水介质大量吸收导致背景光缺失、环境昏暗,往往无法保证成像设备能在水下捕获清晰明亮的图像,因此一般需要人工光源进行辅助照明,但同时会导致出现不均匀光照,进而产生对比度低、细节模糊、色彩失真、亮度不均等图像质量问题,最终导致水下作业的难度增大。
2、现有的水下图像增强方法虽然有一定增强效果,但其应用范围仍有限制,当存在非均匀光照影响时,往往达不到预期目标,甚至会导致图像被过度增强或欠增强。复旦大学的专利cn115249211a将水下图像进行小波分解,得到最低频子带和各个高频子带,基于水下非均匀入射光模型对最低频子带进行散射抑制,对各个高频子带进行噪声抑制及细节增强,以初步复原图像,并在此基础上进行动态范围拉伸与直方图匹配,完成图像复原,该方法能有效提升图像的清晰度、对比度,并恢复出更自然的色彩信息,然而,未从成像理论角度对图像进行处理,缺少可解释性,同时其对其他场景的增强效果难以保证。西安电子科技大学的专利cn110223251a采用卷积神经网络对水下图像进行增强,分别构建环境光估计网络a-net、人工光源强度估计网络l-net和透射率估计网络t-net,采用合成水下图像数据集批量循环输入至上述网络,将训练得到的参数代入物理模型,实现图像增强,该方法提高了图像清晰度、改善了图像色偏,减小了人工光源对图像复原的影响,然而,模型训练过程中采用了人工合成水下图像,缺少真实场景的图像数据支持,对真实场景的泛化能力欠佳。河海大学的专利cn104008528a基于阈值分割对非均匀光水下图像进行增强,该方法将原始图像划分为若干像素带,从正常区域中计算阈值,并根据阈值对像素带进行处理,实现水下非均匀光图像的增强,该方法可以协调性调整图像的亮度和纹理,使图像真实可靠,纹理信息丰富,但是需要人工进行正常区域的选取,结果较为主观,无法保证具备良好的增强效果。
3、上述方法均可在一定程度上改善水下非均匀光图像质量,但是对于同时存在环境光和人工光的复杂光照变化场景,其增强效果难以得到保证。
技术实现思路
1、针对现有技术的缺陷,本技术的目的在于提供一种基于局部背景光的水下非均匀光图像增强方法和系统,旨在解决现有方法在处理存在环境光和人工光的复杂光照变化场景时,由于光照、透射率等参数估计不准确而导致的图像处理效果不理想的问题。
2、为实现上述目的,第一方面,本技术提供了一种基于局部背景光的水下非均匀光图像增强方法,包括:
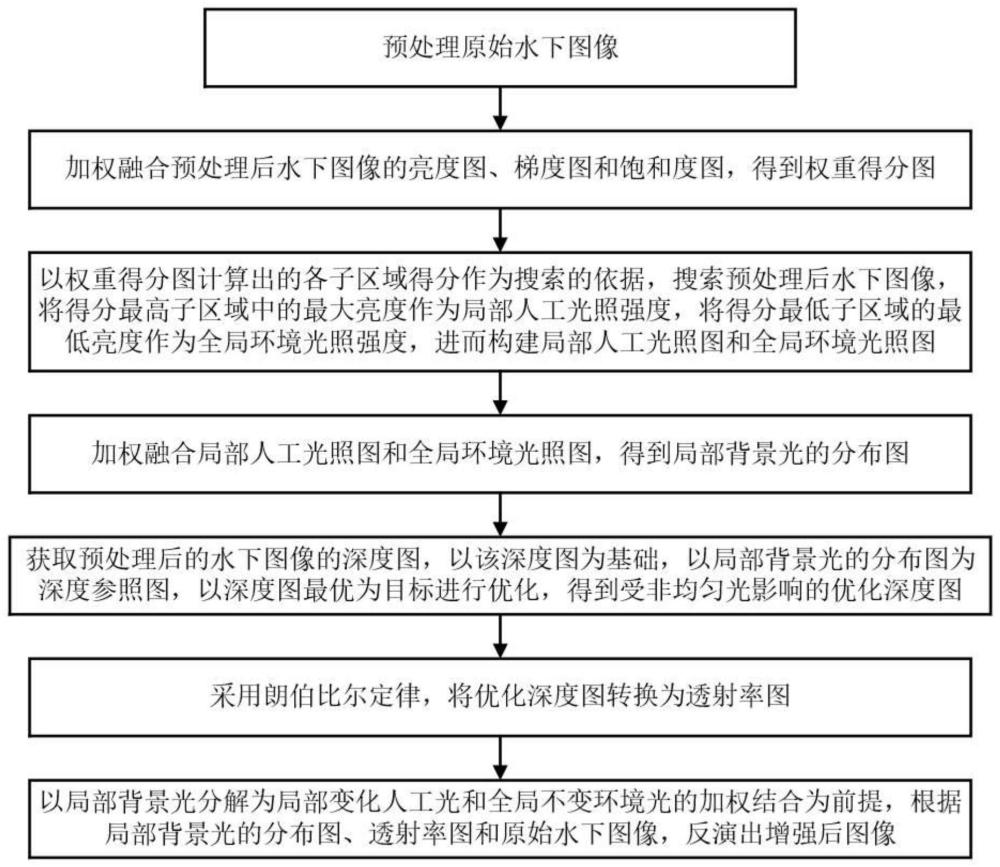
3、s1.预处理原始水下图像;
4、s2.加权融合预处理后水下图像的亮度图、梯度图和饱和度图,得到权重得分图;
5、s3.以权重得分图计算出的各子区域得分作为搜索的依据,搜索预处理后水下图像,将得分最高子区域中的最大亮度作为局部人工光照强度,将得分最低子区域的最低亮度作为全局环境光照强度,进而构建局部人工光照图和全局环境光照图;
6、s4.加权融合局部人工光照图和全局环境光照图,得到局部背景光的分布图;
7、s5.获取预处理后的水下图像的深度图,以该深度图为基础,以局部背景光的分布图为深度参照图,以深度图最优为目标进行优化,得到受非均匀光影响的优化深度图;
8、s6.采用朗伯比尔定律,将优化深度图转换为透射率图;
9、s7.以局部背景光分解为局部变化人工光和全局不变环境光的加权结合为前提,根据局部背景光的分布图、透射率图和原始水下图像,反演出增强后图像。
10、优选地,所述预处理包括:
11、s11.对水下图像进行双边滤波;
12、s12.采用基于通道补偿的改进灰度世界校正算法处理滤波后图像,得到预处理后水下图像。
13、需要说明的是,本技术优选上述预处理算法和顺序,对图像进行去噪、色彩校正,其中,双边滤波减小噪声对改进模型参数估计的影响的同时,保留边缘信息,色彩保持度更佳,计算复杂度低;采用基于通道补偿的改进灰度世界校正算法,其相对于恶劣的水下场景具有更加良好的环境适应性和鲁棒性,可消除图像色偏等对改进模型参数估计的影响。
14、优选地,步骤s2中所述加权融合包括:
15、s21.以图像的均值μ与方差σ2为依据,分别计算得到亮度图加权系数a、梯度图加权系数b和饱和度图加权系数c:
16、
17、其中,μlight和μgrad分别表示亮度图和梯度图的均值,和分别表示亮度图和梯度图的方差;
18、s22.根据上述加权系数进行求和,得到权重得分图:
19、
20、其中,s表示权重得分图,igrad表示梯度图,isatu表示饱和度图,ilight表示亮度图。
21、需要说明的是,相较于人为给定固定不变的加权系数,本技术优选上述方式确定亮度图、梯度图和饱和度图的加权系数,能够根据图像特点设置相应加权系数,具备更强的灵活性与适应性,能进一步提高图像增强效果。
22、优选地,步骤s3具体包括:
23、s31.将预处理图像分割为四个尺寸相同的子节点区域,计算每个子节点区域的得分:
24、
25、其中,subscorecnt表示第cnt个子节点区域的得分情况,p和q分别表示图像子节点区域的行数和列数,s(i,j)表示在权重得分图位置(i,j)处的像素值大小,即相应坐标位置处的得分;
26、s32.将得分最高区域即光照最强区域,作为人工光搜索的根节点区域rlocal0,将得分最低区域即光照最弱区域,作为环境光搜索的根节点区域rglobal0;
27、s33.分别对两个根节点区域进行四叉树搜索与子节点区域迭代,直至子节点区域尺寸小于给定尺寸时停止迭代搜索,此时得到的区域rlocaln和rglobaln即为最终的人工光和环境光所在区域,并在人工光区域rlocaln中选取最大光照强度及相应坐标位置,作为人工光源的光照强度和位置,在环境光区域rglobaln中选取最小光照强度及相应坐标位置,作为环境光强度和受人工光影响的最远位置;
28、s34.以环境光强度作为全局背景光,得到全局环境光照图lglobal,将人工光源视作近似点光源,采用朗伯比尔定律将上述人工光到环境光的衰减过程进行拟合,得到局部人工光照图llocal。
29、需要说明的是,本技术优选上述四叉树搜索方式,基于此前的得分图进行搜索选择,将图像均匀分块,实现人工光和环境光强度及位置的快速定位与搜索,其空间复杂度低,处理速度快。
30、优选地,步骤s31之前还包括:采用最小滤波的方法处理预处理后图像,以去除图像中白色物体对光照估计的影响。
31、需要说明的是,本技术优选在光照估计之前采用最小滤波去除图像中白色物体,减少白色物体对于光照强度及位置估计结果的影响,有利于提高图像增强效果。
32、优选地,步骤s5中,采用暗通道先验方法获取预处理后水下图像的深度图。
33、需要说明的是,本技术优选dcp算法获取粗略深度图,其在保证具有广泛适用性的同时还具备一定程度的准确性,且算法简洁,计算速度较快,适合应用于实际场景。
34、优选地,步骤s5中,采用admm法进行优化,确定受非均匀光影响的优化深度图。
35、需要说明的是,本技术优选admm法迭代优化,该优化算法采用针对等式约束的凸优化问题能够快速收敛到最优解,此外对噪声和非凸性具有一定鲁棒性,在实际应用中有广泛适用性。
36、优选地,所述透射率图的转换公式如下:
37、
38、其中,tλ(x,y)表示透射率图上目标物上一点(x,y)处的透射率值,cλ表示光在水中的总衰减系数,d(x,y)表示优化深度图中目标物上一点(x,y)处与成像设备之间的距离。
39、优选地,增强后图像的反演公式如下:
40、i(x,y)=j(x,y)·t(x,y)+(m·llocal(x,y)+n·lglobal)·(1-t(x,y))
41、其中,i表示原始水下图像,即退化图像,j为期望恢复与增强的图像,t表示由深度图推算得到的透射率图,llocal(x,y)表示图像中像素点在位置(x,y)处的人工光强度,其会随着图像像素点空间位置变化而变化的局部非均匀光,lglobal表示光照强度全局不变的环境光,m和n分别表示局部光和全局光组合权重系数,m·llocal(x,y)+n·lglobal表示局部背景光的分布图。
42、为实现上述目的,第二方面,本技术提供了一种基于局部背景光的水下非均匀光图像增强系统,包括:
43、至少一个存储器,用于存储程序;
44、至少一个处理器,用于进入所述存储器存储的程序,当所述存储器存储的程序被进入时,所述处理器用于进入如第一方面所述的方法。
45、可以理解的是,上述第二方面的有益效果可以参见上述第一方面中的相关描述,在此不再赘述。
46、总体而言,通过本技术所构思的以上技术方案与现有技术相比,具有以下有益效果:
47、本技术提出一种基于局部背景光的水下非均匀光图像增强方法和系统,对现有物理成像模型中的全局背景光进行改进,使用环境光和人工光组合得到的局部背景光将现有模型中的全局光照因子进行替代,进而获得改进物理成像模型,基于此前提,通过亮度图、梯度图和饱和度图构建权重得分图,以该权重得分图为依据,对包含非均匀光照的输入图像进行光照估计,得到局部背景光的分布图,再根据局部背景光的分布图和粗略深度图进行深度图优化,得到非均匀光影响的细化深度图,并将其转换为透射率图,接着根据局部背景光的分布图、透射率图和原始水下图像,反演增强后图像,本技术不仅考虑了非均匀光照的影响,同时一定程度上保证图像的边界和细节信息,有效提高水下非均匀光照图像的质量,尤其适用于光照条件复杂的场景。
- 还没有人留言评论。精彩留言会获得点赞!