一种智能仓储系统中子母车与提升机的协同控制方法与流程
本发明涉及智能仓储,具体是一种智能仓储系统中子母车与提升机的协同控制方法。
背景技术:
1、子母车是指一种用于在仓库或物流中心等场所进行货物搬运和存储的特殊设备,提升机是一种用于垂直运输物料的设备,主要用于仓库、工厂、物流中心等场所的货物搬运和储存,智能仓储系统中,子母车和提升机通常需要进行协同控制,以实现高效的仓储操作;
2、在现有技术中,往往对用于不同楼层运输的子母机的管理采取单一的管理方法,不考虑其与提升机的交互问题,导致货物运输的效率偏低,且现有技术中,大多只考虑降低单一子母机的运输耗时,却忽略了其对其他子母机运输耗时的影响,没能将他们作为一个整体去处理,导致仓储管理的智能化水平不高,针对现有技术的不足,本发明提供了一种智能仓储系统中子母车与提升机的协同控制方法。
技术实现思路
1、本发明的目的在于提供一种智能仓储系统中子母车与提升机的协同控制方法。
2、本发明的目的可以通过以下技术方案实现:一种智能仓储系统中子母车与提升机的协同控制方法,包括以下步骤:
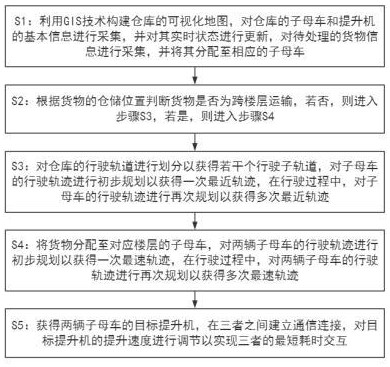
3、步骤s1:利用gis技术构建仓库的可视化地图,对仓库的子母车和提升机的基本信息进行采集,并对其实时状态进行更新,对待处理的货物信息进行采集,并将其分配至相应的子母车;
4、步骤s2:根据货物的仓储位置判断货物是否为跨楼层运输,若否,则进入步骤s3,若是,则进入步骤s4;
5、步骤s3:对仓库的行驶轨道进行划分以获得若干个行驶子轨道,对子母车的行驶轨迹进行初步规划以获得一次最近轨迹,在行驶过程中,对子母车的行驶轨迹进行再次规划以获得多次最近轨迹;
6、步骤s4:将货物分配至对应楼层的子母车,对两辆子母车的行驶轨迹进行初步规划以获得一次最速轨迹,在行驶过程中,对两辆子母车的行驶轨迹进行再次规划以获得多次最速轨迹;
7、步骤s5:获得两辆子母车的目标提升机,在三者之间建立通信连接,对目标提升机的提升速度进行调节以实现三者的最短耗时交互。
8、进一步的,利用gis技术构建仓库的可视化地图的过程包括:
9、对仓库布局数据、货架布局数据、设备分布数据进行采集,利用gis技术根据所采集的各项数据构建仓库的可视化地图,通过移动终端对所构建的可视化地图进行查看。
10、进一步的,对仓库的子母车和提升机的基本信息进行采集,并对其实时状态进行更新,对待处理的货物信息进行采集,并将其分配至相应的子母车的过程包括:
11、对子母车的基本信息进行采集,包括载荷能力、移动速度、实时位置,对提升机的基本信息进行采集,包括载荷能力、提升速度,获得子母车和提升机的实时状态,包括使用状态和空闲状态,对待处理的货物信息进行采集,包括货物名称、货物编号、货物规格、入库时间、仓储位置,根据货物规格将货物分配至处于空闲状态的子母车。
12、进一步的,根据货物的仓储位置判断货物是否为跨楼层运输的过程包括:
13、获得货物的当前楼层,根据所获得的仓储位置判断货物是否为跨楼层运输,若货物的仓储位置处于当前楼层,则将其标记为本楼层运输,若货物的仓储位置不处于当前楼层,则将其标记为跨楼层运输。
14、进一步的,对仓库的行驶轨道进行划分以获得若干个行驶子轨道,对子母车的行驶轨迹进行初步规划以获得一次最近轨迹的过程包括:
15、在可视化地图中,获得仓库的行驶轨道的所有可转向路口,以其为划分节点将行驶轨道划分为若干个行驶子轨道,在子母车当前的车辆位置和货物的仓储位置之间构建一次最近轨迹,所述一次最近轨迹为理想状态下的行驶轨迹。
16、进一步的,在其行驶过程中,对子母车的行驶轨迹进行再次规划以获得多次最近轨迹的过程包括:
17、当子母车驶至下一划分节点时,对其行驶轨迹进行再次规划,将行驶子轨道区分为不可通行状态和可通行状态,子母车每到达一次划分节点,便对其进行一次再次规划;
18、采用dijkstra算法在车辆位置和仓储位置之间获得最短可通行轨迹,并将其标记为多次最近轨迹,所述多次最近轨迹同时满足两个条件,组成多次最近轨迹的各个行驶子轨道必须首尾相连,组成多次最近轨迹的各个行驶子轨道必须处于可通行状态。
19、进一步的,将货物分配至对应楼层的子母车,对两辆子母车的行驶轨迹进行初步规划以获得一次最速轨迹的过程包括:
20、在跨楼层运输的情况下,还需将货物分配至仓储位置所对应的楼层的子母车,将各个提升机所处位置作为两个楼层的行驶轨道的交汇点,分别以两辆子母车的车辆位置为起点,以同一交汇点为终点,在三者之间构建一次最速轨迹,所述一次最速轨迹为理想状态下的行驶轨迹。
21、进一步的,在行驶过程中,对两辆子母车的行驶轨迹进行再次规划以获得多次最速轨迹的过程包括:
22、分别对两辆子母车的行驶轨迹进行再次规划,获得从车辆位置到交汇点的所有可通行方案及其通行时长,进而获得同一楼层内所有处于使用状态的子母车的所有可通行方案及其相应的通行时长;
23、在同一时间段,任一行驶子轨道上不得同时存在两辆行驶方向相反的子母车,各个子母车最终所采取的可通行方案的通行时长的总和为最小的情况,并将其最终所采取的可通行方案标记为多次最速轨迹,当同一楼层内处于使用状态的子母车数量增加或减少时,便进行一次再次规划。
24、进一步的,获得两辆子母车的目标提升机,在三者之间建立通信连接,对目标提升机的提升速度进行调节以实现三者的最短耗时交互的过程包括:
25、将两辆子母车的交汇点所对应的提升机标记为两者的目标提升机,在三者之间建立通信连接,所述目标提升机的提升速度能够进行调节,获得当前楼层的子母车的第一提升时长和第一提示路程,当该子母车与目标提升机之间的剩余路程小于第一提示路程时,控制目标提升机以最低提升速度移动到当前楼层进行交互;
26、获得对应楼层的子母车的第二提升时长和第二提示路程,当该子母车与目标提升机之间的剩余路程小于第二提示路程时,且目标提升机与当前楼层的子母车完成交互后,控制目标提升机以最高提升速度移动到对应楼层进行交互,以确保三者交互的耗时最短。
27、与现有技术相比,本发明的有益效果是:
28、1、本发明通过将货物仓储分为本楼层运输和跨楼层运输两种类型,并对其采取两种不同的处理方法,避免了以往只考虑货物运输而将用于两种类型运输的子母车混为一谈,使得不同楼层的货物运输管理混乱的情况发生,通过对提升机的提升速度进行调节以使其交互耗时最短,能够在不同楼层之间形成有效的衔接,大大提高货物运输的效率;
29、2、对于本楼层运输,以路程最短为标准,使得各个子母车在行驶轨道上不会长时间停留,能够为跨楼层运输及时让开共用的行驶轨道,对于跨楼层运输,以速度最均衡为标准,考虑到各个子母车的共同耗时,避免有的子母车运输畅通,有的子母车却耗时过长的情况发生,能够有效地减少运输拥堵的情况发生,提高仓储管理的智能化。
- 还没有人留言评论。精彩留言会获得点赞!