一种基于机器视觉的无人洗车系统及方法与流程
本发明属于无人洗车,具体涉及一种基于机器视觉的无人洗车系统及方法。
背景技术:
1、随着汽车的拥有量日益增高,车辆的清洗保养也越来越得到车主的重视,但是,传统的人工洗车存在因洗车工人的专业性不高,导致在洗车过程中损伤车辆,另一方面,传统的洗车方式造成水资源浪费和环境污染,除此之外,还存在人力资源浪费、洗车效率不高以及服务质量参差不齐、无法精准判断车辆脏污程度等问题。
技术实现思路
1、为解决现有技术中存在的上述问题,本发明提供了一种基于机器视觉的无人洗车系统及方法,通过获取洗车预约信息,通过终端识别车辆牌照信息,根据车辆牌照信息验证洗车预约信息得到验证结果,根据验证结果生成车辆验证信息和预约提示信息,根据车辆验证信息获取车辆图像数据,根据车辆图像数据通过图像处理得到车辆灰度图像,根据车辆灰度图像得到污渍候选区域帧,根据污渍候选区域帧通过污渍识别网络模型处理得到匹配洗车模式,根据车身灰度图像信息得到车辆关键点信息和车辆边缘曲线信息,根据车辆边缘曲线信息生成洗车控制指令,根据模式确认信息和洗车完成信息得到待支付信息和工具复位控制指令,实现了无人值守自动洗车和识别车辆脏污程度进行个性化洗车模式推荐,提高了洗车服务质量和洗车效率,降低了劳动成本。
2、本发明的目的可以通过以下技术方案实现:
3、一种基于机器视觉的无人洗车方法,包括以下步骤:
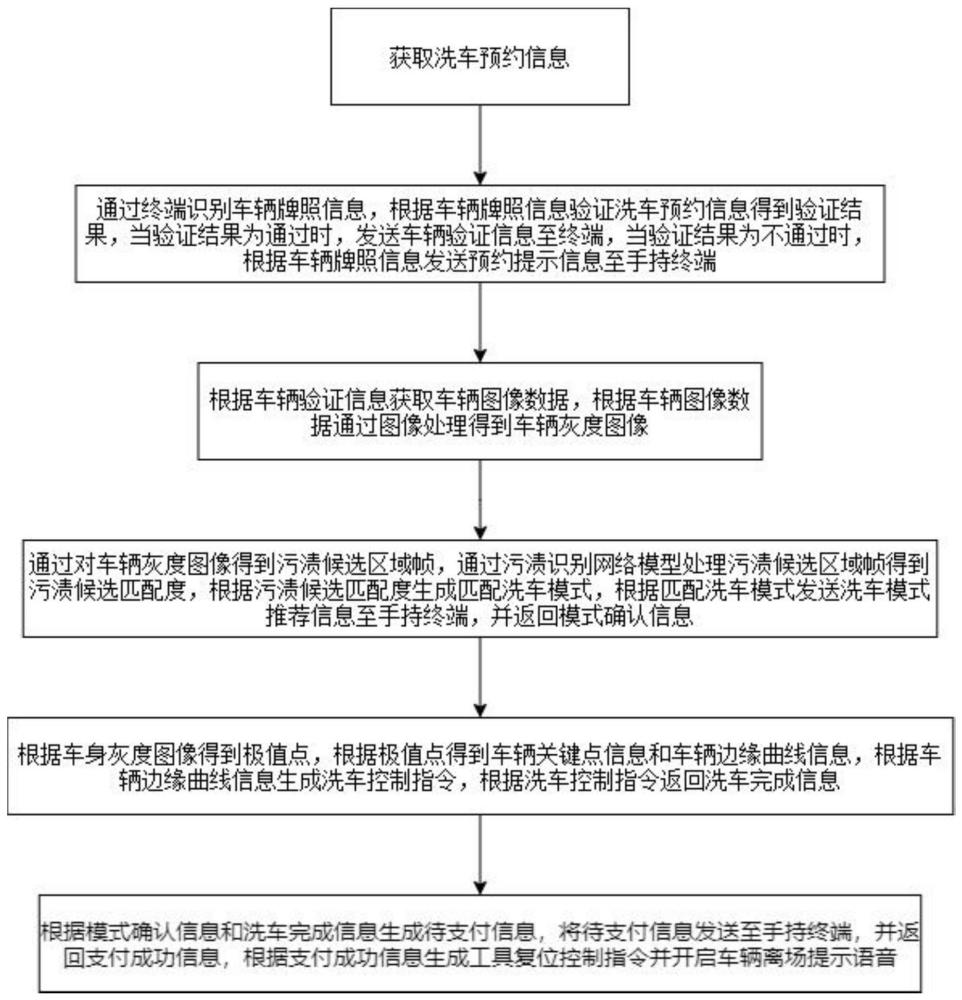
4、s1:获取洗车预约信息,所述洗车预约信息包括车辆牌照信息;
5、s2:通过终端识别所述车辆牌照信息,根据所述车辆牌照信息验证所述洗车预约信息得到验证结果,当所述验证结果为通过时,发送车辆验证信息至终端,当所述验证结果为不通过时,根据所述车辆牌照信息发送预约提示信息至手持终端;
6、s3:根据所述车辆验证信息获取车辆图像数据,根据所述车辆图像数据通过图像处理得到车辆灰度图像;
7、s4:通过对所述车辆灰度图像进行特征提取得到车辆表面特征,根据所述车辆表面特征生成污渍候选区域帧,通过污渍识别网络模型处理所述污渍候选区域帧得到污渍候选匹配度,根据所述污渍候选匹配度生成匹配洗车模式,根据所述匹配洗车模式发送洗车模式推荐信息至所述手持终端,并返回模式确认信息,所述匹配洗车模式包括普通洗车模式、精细洗车模式;
8、s5:根据所述车身灰度图像通过拉普拉斯变换得到拉普拉斯金字塔,根据所述拉普拉斯金字塔通过极值搜索得到极值点,根据所述极值点得到车辆关键点信息,根据所述车辆关键点信息通过拟合算法得到车辆边缘曲线信息,根据所述车辆边缘曲线信息生成洗车控制指令,根据所述洗车控制指令返回洗车完成信息,所述关键点信息包括关键点坐标、关键点方向;
9、s6:根据所述模式确认信息和所述洗车完成信息生成待支付信息,将所述待支付信息发送至所述手持终端,并返回支付成功信息,根据所述支付成功信息生成工具复位控制指令并开启车辆离场提示语音。
10、优选地,所述步骤s3具体包括以下步骤:
11、s301:获取车辆图像像素点坐标,根据所述车辆图像数据通过图像滤波模型处理得到去噪像素点坐标,所述图像滤波模型表示为:其中,h(x1,y1)表示所述去噪像素点坐标,σ表示函数标准差,x和y表示所述车辆图像像素点坐标;
12、s302:根据所述去噪像素点坐标得到去噪车辆图像,根据所述去噪车辆图像通过灰度处理得到所述车辆灰度图像。
13、优选地,所述步骤s4具体包括以下步骤:
14、s401:通过对所述车辆灰度图像进行特征提取得到车辆表面特征,根据所述车辆表面特征得到车辆特征图,获取所述车辆特征图的中心坐标距离,根据所述中心坐标距离和所述车辆特征图通过置信度公式计算得到置信度分数,根据所述置信度分数通过目标检测的损失函数计算得到污渍特征图集;
15、s402:根据所述污渍特征图集得到污渍区域帧信息,根据所述污渍区域帧信息通过计算欧式距离得到所述污渍候选区域帧,所述污渍区域帧信息包括协方差矩阵、匹配度;
16、s403:获取车辆标准污渍图像,根据所述车辆标准污渍图像通过训练得到所述污渍识别网络模型,将所述污渍候选区域帧输入所述污渍识别网络模型得到所述污渍候选匹配度;
17、s404:当所述污渍候选匹配度大于等于预设阈值时,输出所述匹配洗车模式为所述精细洗车模式,当所述污渍候选匹配度小于预设阈值时,输出所述匹配洗车模式为所述普通洗车模式。
18、优选地,所述步骤s401具体包括以下步骤:
19、计算所述置信度分数,计算公式为:其中,sco表示所述置信度分数,l表示所述车辆特征图,d表示所述中心坐标距离,v表示所述车辆特征图的对角线距离,α表示权重系数,γ表示宽高比参数;
20、当所述置信度分数大于预设阈值时,将所述置信度分数对应的所述车辆特征图通过目标检测的损失函数计算得到所述污渍特征图集,所述损失函数公式为:loss=γ1lossqw+γ2losscon+γ3losscov其中loss表示所述损失函数,γ1、γ2、γ3表示权重系数,lossqw为表示所述车辆特征图损失函数,losscon表示置信度损失函数,losscov表示定位损失函数。
21、优选地,所述步骤s402具体包括以下步骤:
22、计算所述欧氏距离,计算公式为:其中,dij表示所述欧氏距离,si和sj表示所述匹配度,hi-1表示所述协方差矩阵;
23、当所述欧氏距离大于0.95时,所述污渍特征图集为所述污渍候选区域帧。
24、优选地,所述步骤s5具体包括以下步骤:
25、s501:根据所述极值点坐标得到黑塞矩阵,所述黑塞矩阵表示为:其中,h表示所述黑塞矩阵,gxx表示所述极值点坐标的x轴二阶偏导,gxy表示所述极值点坐标的二阶混合偏导,gyy表示所述极值点坐标的y轴二阶偏导,通过所述黑塞矩阵计算所述关键点坐标,计算公式为:其中,tre(x,y)表示所述关键点坐标,gxx表示所述极值点坐标的x轴二阶偏导,gxy表示所述极值点坐标的二阶混合偏导,gyy表示所述极值点坐标的y轴二阶偏导;
26、s502:所述关键点方向包括关键点幅值、关键点幅角,根据所述关键点坐标分别计算所述关键点幅值和所述关键点幅角,计算公式为:其中,k(x,y)表示所述关键点幅值,θ(x,y)表示所述关键点幅角,h(x+1,y)、h(x-1,y)、h(x,y+1)和h(x,y-1)表示四个关键点坐标。
27、一种基于机器视觉的无人洗车系统,包括:
28、洗车信息获取模块,用于获取洗车预约信息,所述洗车预约信息包括车辆牌照信息、预计洗车时间;
29、车辆校验模块,用于通过终端识别所述车辆牌照信息,根据所述车辆牌照信息验证所述洗车预约信息得到验证结果,当所述验证结果为通过时,发送车辆验证信息至终端,当所述验证结果为不通过时,根据所述车辆牌照信息发送预约提示信息至手持终端;
30、车辆信息采集模块,用于根据所述车辆验证信息获取车辆图像数据,根据所述车辆图像数据通过图像处理得到车辆灰度图像,通过对所述车辆灰度图像进行特征提取得到车辆表面特征,根据所述车辆表面特征生成污渍候选区域帧,通过污渍识别网络模型处理所述污渍候选区域帧得到污渍候选匹配度,根据所述污渍候选匹配度生成匹配洗车模式,根据所述匹配洗车模式发送洗车模式推荐信息至所述手持终端,并返回模式确认信息,所述匹配洗车模式包括普通洗车模式、精细洗车模式;
31、洗车控制模块,用于根据所述车身灰度图像通过拉普拉斯变换得到拉普拉斯金字塔,根据所述拉普拉斯金字塔通过极值搜索得到极值点,根据所述极值点得到车辆关键点信息,根据所述车辆关键点信息通过拟合算法得到车辆边缘曲线信息,根据所述车辆边缘曲线信息生成洗车控制指令,根据所述洗车控制指令返回洗车完成信息,所述关键点信息包括关键点坐标、关键点方向;
32、洗车收费模块,用于根据所述模式确认信息生成待支付信息,将所述待支付信息发送至所述手持终端,并返回支付成功信息,根据所述支付成功信息生成工具复位控制指令并开启车辆离场提示语音。
33、本发明的有益效果为:
34、1.通过对所述车辆灰度图像进行特征提取得到车辆表面特征,根据所述车辆表面特征生成污渍候选区域帧,通过污渍识别网络模型处理所述污渍候选区域帧得到污渍候选匹配度,根据所述污渍候选匹配度生成匹配洗车模式,根据所述匹配洗车模式发送洗车模式推荐信息至所述手持终端,并返回模式确认信息,所述匹配洗车模式包括普通洗车模式、精细洗车模式,实现了精准识别车辆脏污程度进行个性化洗车模式推荐,提高了服务质量;
35、2.根据所述车身灰度图像通过拉普拉斯变换得到拉普拉斯金字塔,根据所述拉普拉斯金字塔通过极值搜索得到车辆关键点信息,根据所述车辆关键点信息通过拟合算法得到车辆边缘曲线信息,根据所述车辆边缘曲线信息生成洗车控制指令,根据所述洗车控制指令返回洗车完成信息,根据所述模式确认信息生成待支付信息,将所述待支付信息发送至所述手持终端,并返回支付成功信息,根据所述支付成功信息生成工具复位控制指令并开启车辆离场提示语音,提高了洗车效率和洗车质量,降低了劳动成本,实现了水资源的节约。
- 还没有人留言评论。精彩留言会获得点赞!