一种基于YOLOv8改进的烟草植株识别计数方法
本技术涉及图像识别,具体涉及一种基于yolov8改进的烟草植株识别计数方法。
背景技术:
1、在农业信息化和智能化的背景下,烟草植株的精确识别与计数对于实现烟草种植的高效管理和决策至关重要。传统的人工计数方法不仅效率低下,且易受到人为因素的影响,导致计数的准确性无法得到保障。随着计算机视觉和深度学习技术的飞速发展,基于深度学习的目标检测算法在物体识别和计数方面展现出巨大的潜力。
2、yolov8作为一种先进的实时目标检测算法,以其高效的检测速度和较高的准确率在多个领域得到广泛应用。然而,烟草植株在生长过程中会经历形态和颜色的变化,同时烟田环境复杂多变,如光照条件、背景干扰等因素都可能对识别计数造成干扰。此外,烟草植株之间的遮挡和重叠问题也增加了识别和计数的难度。
3、因此,针对烟草植株的特点和烟田环境的复杂性,如何提高烟草植株识别计数的准确率是本领域亟待解决的技术问题。
技术实现思路
1、本技术为了解决上述技术问题,提出了如下技术方案:
2、第一方面,本技术实施例提供了一种基于yolov8改进的烟草植株识别计数方法,包括:
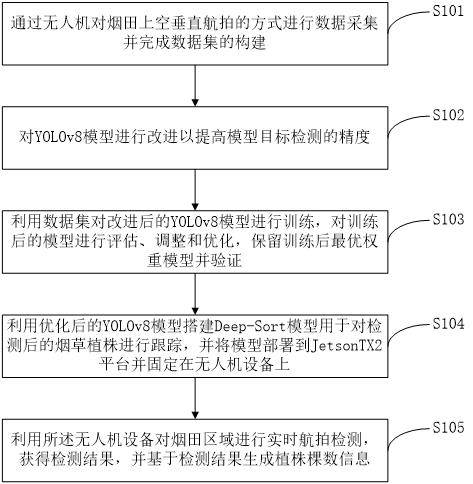
3、通过无人机对烟田上空垂直航拍的方式进行数据采集并完成数据集的构建;
4、对yolov8模型进行改进以提高模型目标检测的精度;
5、利用数据集对改进后的yolov8模型进行训练,对训练后的模型进行评估、调整和优化,保留训练后最优权重模型并验证;
6、利用优化后的yolov8模型搭建deep-sort模型用于对检测后的烟草植株进行跟踪,并将模型部署到jetsontx2平台并固定在无人机设备上;
7、利用所述无人机设备对烟田区域进行实时航拍检测,获得检测结果,并基于检测结果生成植株棵数信息。
8、在一种可能的实现方式中,所述通过无人机对烟田上空垂直航拍的方式进行数据采集并完成数据集的构建,包括:
9、收集不同高度、不同地区、不同背景和不同生长时期的大量烟草植株图像数据;
10、对采集到的数据进行预处理,通过在线数据增强和离线数据增强方式进行扩充,分类标注制作成数据集,并进一步划分为训练集、验证集和测试集;
11、使用labelme标注工具对采集到的图像进行标注,并保存为yolo目标检测算法可以识别的voc格式文件;
12、按照7∶2∶1的比例划分以上图片,分别制作训练集、验证集以及测试集。
13、在一种可能的实现方式中,所述对yolov8模型进行改进以提高模型目标检测的精度,包括:
14、在backbone部分引入渐近特征金字塔网络,通过融合两个相邻的low-level特征,有助于跨非相邻level的直接特征融合,从而防止特征信息在传输和交互过程中的丢失或退化;渐进地将high-level特征纳入融合过程,避免非相邻level之间的较大语义差距,从而提高目标检测的精度;通过相邻层之间的上采样或下采样,得到当前层中特征图大小的统一,然后使用更关注关键层的自适应特征空间融合;
15、使用sppfcspc替换yolov8池化层中的空间金字塔池化结构,综合sppf模块与csp模块,使模型能在保持感受野不变的情况下获得速度与精度的提升;
16、采用mpdiou损失函数提高模型的性能,增强模型的拟合能力。
17、在一种可能的实现方式中,所述通过相邻层之间的上采样或下采样,得到当前层中特征图大小的统一,然后使用更关注关键层的自适应特征空间融合过程,如下式所示:
18、
19、其中,、分别表示线性组合时的输入权重,满足,表示位于处的特征向量从第层到第层的转换值。
20、在一种可能的实现方式中,所述采用mpdiou损失函数提高模型的性能,增强模型的拟合能力,包括:基于最小点距离的新型边界框相似度比较度量标准,直接最小化预测边界框与实际标注边界框之间的左上角和右下角点距离,具体计算公式如下:
21、
22、
23、
24、式中a、b分别表示两个任意凸形,、分别表示输入图像的宽度、高度,、分别代表a的左上和右下点坐标,、分别代表b的左上和右下点坐标,、分别代表a、b的左上角之间的欧氏距离和右下角之间的欧氏距离的平方。
25、在一种可能的实现方式中,对模型进行评价所采用的评价指标包括:召回率recall、精确率precision、平均精确率map和f1得分f1score;
26、所述recall表示模型检测出的烟草植株数目占实际上烟草植株数目的比例:
27、
28、所述precision表示模型检测出的烟草植株数目中正确的数目的占比:
29、
30、所述map表示模型在置信度阈值为0.5下的平均精确率:
31、
32、所述f1score表示精确率和召回率的调和平均值,用于综合考虑模型的准确性和完整性;
33、
34、其中,tp表示被正确检测出的目标数,fn表示被错误检测出的目标数,fp表示未被检测出的目标数,ap_i表示第i个类别的平均精确率,n表示类别的总数目。
35、在一种可能的实现方式中,所述利用优化后的yolov8模型搭建deep-sort模型用于对检测后的烟草植株进行跟踪,并将模型部署到jetsontx2平台并固定在无人机设备上,包括:
36、使用改进后的yolov8模型作为deep-sort模型的目标检测模块;
37、将deep-sort模型部署到jetson tx2平台并固定在无人机设备上,实现无人机航拍视频中的实时计数。
38、在一种可能的实现方式中,所述利用所述无人机设备对烟田区域进行实时航拍检测,获得检测结果,并基于检测结果生成植株棵数信息,包括:
39、获取实时无人机航拍视频,根据实时视频截取得到实时监控图像;
40、利用deep-sort模型中改进的yolov8检测模型,对实时航拍图像进行检测,获得检测结果;
41、使用deep-sort模型对检测目标进行跟踪,对当前帧中的植株棵数进行输出,并通过循环遍历输出检测过程中烟草植株的总棵数。
42、在本技术实施例中,获取烟草生长周期内不同时期的无人机烟田视频数据,并通过在线数据增强、离线数据增强等方式进行扩充,分类标注制作成数据集,并进一步划分为训练集、验证集和测试集;在yolov8的backbone部分改进为目标检测的渐近特征金字塔网络,通过融合两个相邻的low-level特征,防止特征信息在传输和交互过程中的丢失或退化,提高目标检测的精度;为提高模型在复杂背景下检测的鲁棒性,使用sppfcspc替换yolov8池化层中的空间金字塔池化结构,解决了重复特征提取的问题,节省计算成本;采用mpdiou损失函数提高模型的性能,增强模型的拟合能力。搭建了deep-sort模型对检测后的烟草植株进行跟踪,并将模型部署到jetsontx2平台并固定在无人机设备上,从而实现对无人机航拍视频中植株的实时计数;本实施例提供的技术方法可以提高烟草植株识别计数的准确率,实现计数模块的轻量化部署,有助于烟田的智能化管理。
- 还没有人留言评论。精彩留言会获得点赞!