TMVR参数确定方法、装置和设备与流程
本发明涉及医学图像处理以及相关,具体地,涉及适用于一种tmvr参数确定方法、装置和设备。
背景技术:
1、心脏瓣膜病是一种常见的心脏病,其中以风湿热导致的瓣膜损害最为常见。二尖瓣瓣膜病变是第二常见的心脏瓣膜病。经导管二尖瓣置换术(transcatheter mitralvalve replacement,tmvr)是指将人工瓣膜在体外压缩,装载至输送系统,然后沿着血管路径或经心尖途径送达二尖瓣瓣环处以替代病变瓣膜的一种介入手术。
2、随着经导管技术在二尖瓣介入治疗中的应用越来越广泛,手术前ct评估二尖瓣已经成为心脏成像的一项扩展应用。计算机断层扫描(ct)对二尖瓣复杂的三维结构的评估一直是研究的重点。传统上对二尖瓣结构的评估采用的是二维的评估和测量方法,然而这种二维的评估和测量只能近似地反映瓣膜参数的真实值,而三维的评估和测量可以真实地评估二尖瓣的结构。不幸的是,由于二尖瓣复杂的三维解剖结构,人工测量是非常繁琐、耗时和具有挑战性的。对于tmvr术前的参数提取,与人工测量相比,一种基于ct图像的tmvr术前参数自动计算的方法可以更加有效地辅助临床医生进行tmvr术前参数的快速获取,其具有重要的临床意义。
3、现有技术中,利用ct图像获得tmvr术前参数,首先必须对心脏的ct图像进行处理,获得二尖瓣及其相关的毗邻组织,以及定位二尖瓣平面。目前还没有相关技术给出自动分割二尖瓣或者定位二尖瓣平面以及自动计算二尖瓣参数的方法。
技术实现思路
1、本文中描述的实施例提供了一种tmvr参数确定方法、装置和设备,解决现有技术存在的问题。
2、第一方面,根据本公开的内容,提供了一种tmvr参数确定方法,包括:
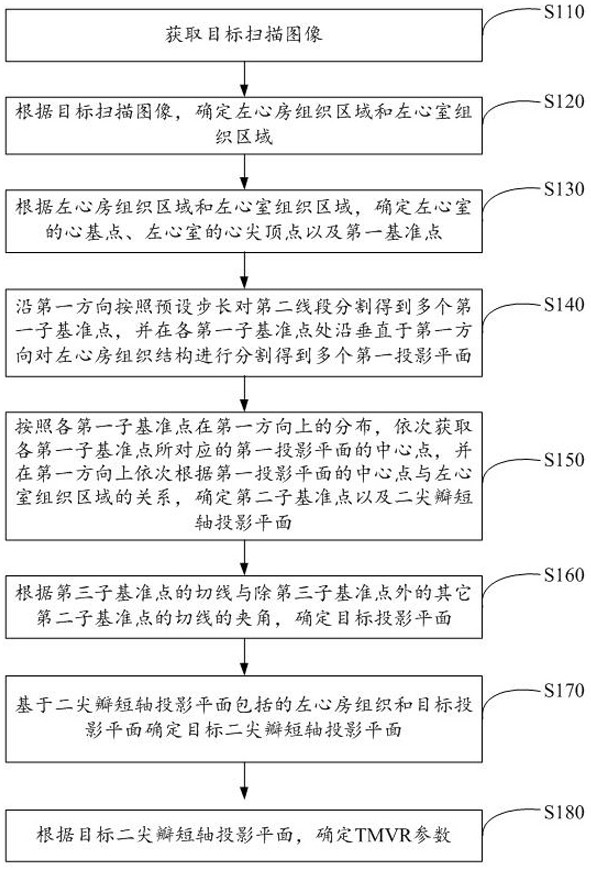
3、获取目标扫描图像;
4、根据所述目标扫描图像,确定左心房组织区域和左心室组织区域,其中,左心房组织区域和左心室组织区域相接连接;
5、根据所述左心房组织区域和所述左心室组织区域,确定左心室的心基点、所述左心室的心尖顶点以及第一基准点,其中,所述心基点和所述心尖顶点构成第一线段,所述心基点到所述心尖顶点的方向为第一方向,所述第一基准点和所述心基点构成第二线段,所述心基点到所述第一基准点的方向为第二方向,所述第一方向和所述第二方向相反;
6、沿所述第一方向按照预设步长对所述第二线段分割得到多个第一子基准点,并在各所述第一子基准点处沿垂直于第一方向对所述左心房组织结构进行分割得到多个第一投影平面;
7、按照各所述第一子基准点在所述第一方向上的分布,依次获取各所述第一子基准点所对应的第一投影平面的中心点,并在所述第一方向上依次根据所述第一投影平面的中心点与所述左心室组织区域的关系,确定第二子基准点以及二尖瓣短轴投影平面;
8、根据第三子基准点的切线与除第三子基准点外的其它第二子基准点的切线的夹角,确定目标投影平面,其中,所述第三子基准点遍历所述第二子基准点;
9、基于所述二尖瓣短轴投影平面包括的左心房组织和所述目标投影平面确定目标二尖瓣短轴投影平面;
10、根据所述目标二尖瓣短轴投影平面,确定tmvr参数,其中,所述tmvr参数包括二尖瓣的面积、周长、心纤维三角距离、两间隔距离和两连合距离。
11、在本公开一些实施例中,所述根据所述左心房组织区域和所述左心室组织区域,确定左心室的心基点、所述左心室的心尖顶点以及第一基准点,包括:
12、获取所述左心房组织区域包括的像素点的坐标信息和所述左心室组织区域包括的像素点的坐标信息;
13、根据所述左心房组织区域包括的像素点的坐标信息和所述左心室组织区域包括的像素点的坐标信息,确定所述左心房组织区域和所述左心室组织区域相接区域;
14、根据所述左心房组织区域和所述左心室组织区域相接区域处像素点的坐标信息确定左心室的心基点;
15、根据所述左心室组织区域包括的像素点的坐标信息和所述左心室的心基点,确定所述左心室的心尖顶点;
16、根据所述左心房组织区域包括的像素点的坐标信息和所述左心室的心基点,确定第一基准点。
17、在本公开一些实施例中,所述根据所述左心房组织区域和所述左心室组织区域相接区域处像素点的坐标信息确定左心室的心基点,包括:
18、获取所述左心房组织区域和所述左心室组织区域相接区域处像素点的坐标信息;
19、基于中心计算方法对所述相接区域处各像素点的坐标信息进行处理,得到左心室的心基点的坐标信息。
20、在本公开一些实施例中,所述按照各所述第一子基准点在所述第一方向上的分布,依次获取各所述第一子基准点所对应的第一投影平面的中心点,并在所述第一方向上依次根据所述第一投影平面的中心点与所述左心室组织区域的关系,确定第二子基准点以及二尖瓣短轴投影平面,包括:
21、按照各所述第一子基准点在所述第一方向上的分布,依次获取各所述第一子基准点所对应的第一投影平面包括的像素点的坐标信息;
22、根据各第一投影平面包括的像素点的坐标信息,依次确定各第一投影平面的中心点所对应的坐标信息;
23、当第一目标投影平面的中心点所对应的坐标位于所述左心室组织区域,则位于与所述第一目标投影平面所对应的第一目标子基准点之前的第一子基准点和第一目标子基准点所对应的第一投影平面的中心点组成第二子基准点;
24、基于所述第一目标投影平面确定二尖瓣短轴投影平面。
25、在本公开一些实施例中,所述根据第三子基准点的切线与除第三子基准点外的其它第二子基准点的切线的夹角,确定目标投影平面,包括:
26、获取第三子基准点的切线与除第三子基准点外的其它第二子基准点的切线的夹角;
27、求取第三子基准点的切线与除第三子基准点外的其它第二子基准点的切线的夹角的和值;
28、选取第三子基准点的切线与除第三子基准点外的其它第二子基准点的切线的夹角的和值最小的第三子基准点作为第二目标子基准点;
29、在所述第二目标子基准点处沿垂直于第二目标子基准点切线方向对所述左心房组织结构进行分割得到目标投影平面。
30、在本公开一些实施例中,所述基于所述二尖瓣短轴投影平面包括的左心房组织和所述目标投影平面确定目标二尖瓣短轴投影平面,包括:
31、获取所述二尖瓣短轴投影平面包括的左心房组织的均值信息和方差信息;
32、根据所述均值信息和所述方差信息确定预设测量数值;
33、获取所述二尖瓣短轴投影平面包括的像素点的测量数值;
34、根据所述二尖瓣短轴投影平面包括的像素点的测量数值与预设测量数值的关系,确定目标二尖瓣短轴投影平面。
35、在本公开一些实施例中,所述预设测量数值包括第一预设测量数值、第二预设测量数值和第三预设测量数值;
36、所述根据所述均值信息和所述方差信息确定预设测量数值,包括:
37、根据所述均值信息确定一预设测量数值,其中,所述第一预设测量数值与所述均值信息相同;
38、基于mean-2*std确定第二预设测量数值,以及基于mean+2*std确定第三预设测量数值,其中,mean为均值,std为方差。
39、在本公开一些实施例中,所述根据所述目标二尖瓣短轴投影平面,确定tmvr参数,包括
40、根据所述目标二尖瓣短轴投影平面获取所述目标二尖瓣短轴投影平面包括的像素个数和所述目标二尖瓣短轴投影平面的轮廓线上包括的像素个数;
41、根据所述目标二尖瓣短轴投影平面包括的像素个数和目标二尖瓣短轴投影平面包括的像素大小,确定二尖瓣的面积;
42、根据所述目标二尖瓣短轴投影平面的轮廓线上包括的像素个数和目标二尖瓣短轴投影平面包括的像素大小,确定二尖瓣的周长;
43、确定在第三方向上所述目标二尖瓣短轴投影平面的轮廓线第一次与所述左心室组织区域接触的第一点,以及在第四方向上所述目标二尖瓣短轴投影平面的轮廓线第一次与所述左心房组织区域接触的第二点;
44、根据所述第一点和所述第二点确定心纤维三角距离;
45、在所述目标二尖瓣短轴投影平面获取与所述心纤维三角距离垂直的最大直径,得到两间隔距离;
46、在所述目标二尖瓣短轴投影平面获取与所述心纤维三角距离平行的最大直径,得到两连和距离。
47、第二方面,根据本公开的内容,提供了一种tmvr参数确定装置,包括:
48、目标扫描图像获取模块,用于获取目标扫描图像;
49、组织结构确定模块,用于根据所述目标扫描图像,确定左心房组织区域和左心室组织区域,其中,左心房组织区域和左心室组织区域相接连接;
50、位置确定模块,用于根据所述左心房组织区域和所述左心室组织区域,确定左心室的心基点、所述左心室的心尖顶点以及第一基准点,其中,所述心基点和所述心尖顶点构成第一线段,所述心基点到所述心尖顶点的方向为第一方向,所述第一基准点和所述心基点构成第二线段,所述心基点到所述第一基准点的方向为第二方向,所述第一方向和所述第二方向相反;
51、第一投影平面获取模块,用于沿所述第一方向按照预设步长对所述第二线段分割得到多个第一子基准点,并在各所述第一子基准点处沿垂直于第一方向对所述左心房组织结构进行分割得到多个第一投影平面;
52、第二子基准点确定模块,用于按照各所述第一子基准点在所述第一方向上的分布,依次获取各所述第一子基准点所对应的第一投影平面的中心点,并在所述第一方向上依次根据所述第一投影平面的中心点与所述左心室组织区域的关系,确定第二子基准点以及二尖瓣短轴投影平面;
53、目标投影平面确定模块,用于根据第三子基准点的切线与除第三子基准点外的其它第二子基准点的切线的夹角,确定目标投影平面,其中,所述第三子基准点遍历所述第二子基准点;
54、目标二尖瓣短轴投影平面确定模块,用于基于所述二尖瓣短轴投影平面包括的左心房组织和所述目标投影平面确定目标二尖瓣短轴投影平面;
55、参数确定模块,用于根据所述目标二尖瓣短轴投影平面,确定tmvr参数,其中,所述tmvr参数包括二尖瓣的面积、周长、心纤维三角距离、两间隔距离和两连合距离。
56、第三方面,根据本公开的内容,提供了一种计算机设备,包括:
57、一个或多个处理器;
58、存储装置,用于存储一个或多个程序,
59、当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现如第一方面中任一所述的方法。
60、本公开实施例提供的tmvr参数确定方法、装置和设备,获取目标扫描图像;根据目标扫描图像,确定左心房组织区域和左心室组织区域;根据左心房组织区域和左心室组织区域,确定左心室的心基点、左心室的心尖顶点以及第一基准点;沿第一方向按照预设步长对所述第二线段分割得到多个第一子基准点,并在各第一子基准点处沿垂直于第一方向对左心房组织结构进行分割得到多个第一投影平面;按照各第一子基准点在所述第一方向上的分布,依次获取各第一子基准点所对应的第一投影平面的中心点,并在第一方向上依次根据第一投影平面的中心点与左心室组织区域的关系,确定第二子基准点以及二尖瓣短轴投影平面;根据第三子基准点的切线与除第三子基准点外的其它第二子基准点的切线的夹角,确定目标投影平面,其中,第三子基准点遍历第二子基准点;基于二尖瓣短轴投影平面包括的左心房组织和目标投影平面确定目标二尖瓣短轴投影平面;根据目标二尖瓣短轴投影平面,确定tmvr参数,实现快速获得二尖瓣及其毗邻组织的结构,并定位二尖瓣平面,自动计算二尖瓣相关测量参数。
61、上述说明仅是本技术实施例技术方案的概述,为了能够更清楚了解本技术实施例的技术手段,而可依照说明书的内容予以实施,并且为了让本技术实施例的上述和其它目的、特征和优点能够更明显易懂,以下特举本技术的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!