CT图像重建方法、装置和系统、存储介质
本公开涉及ct检测,特别涉及一种ct图像重建方法、装置和系统、存储介质。
背景技术:
1、x射线检查技术图像清晰、可读性强、实时性高、人工成本低,是快速无损检测应用中的常见手段。尤其是基于ct(computed tomography,计算机断层成像)技术的断层扫描与成像,通过采集不同角度下物体的投影图像来重建出内部的结构,在发现结构差异、空洞、疏松、褶皱等缺陷上都表现优异。
2、对于大型尺寸的物体,由于难以通过物体自旋转的形式进行ct扫描,因此需要采用扫描装置旋转物体平移的方式进行ct扫描。物体通过可移动部件的带动在扫描通道内移动,使待扫描部分平移至射线照射区域,扫描装置带动射线源和探测器旋转来获取ct重建所需的图像信息。
技术实现思路
1、发明人注意到,由于大型物体在扫描通道内可能存在移位,从而影响被扫描部分的图像效果。如风力发电机叶片,长度长(一般为50米至上百米),但整体密度小(内部中空,外壳材料一般为复合材料,密度在2g/cm3以内),扫描过程中被扫描部分的位置容易受到其他部分抖动的影响而发生移位,导致某些角度的ct扫描数据失真,严重影响叶片内部结构的图像重建和缺陷判断。
2、据此,本公开提供一种ct图像重建方案,能够有效校正因物体抖动而引起的ct图像失真问题。
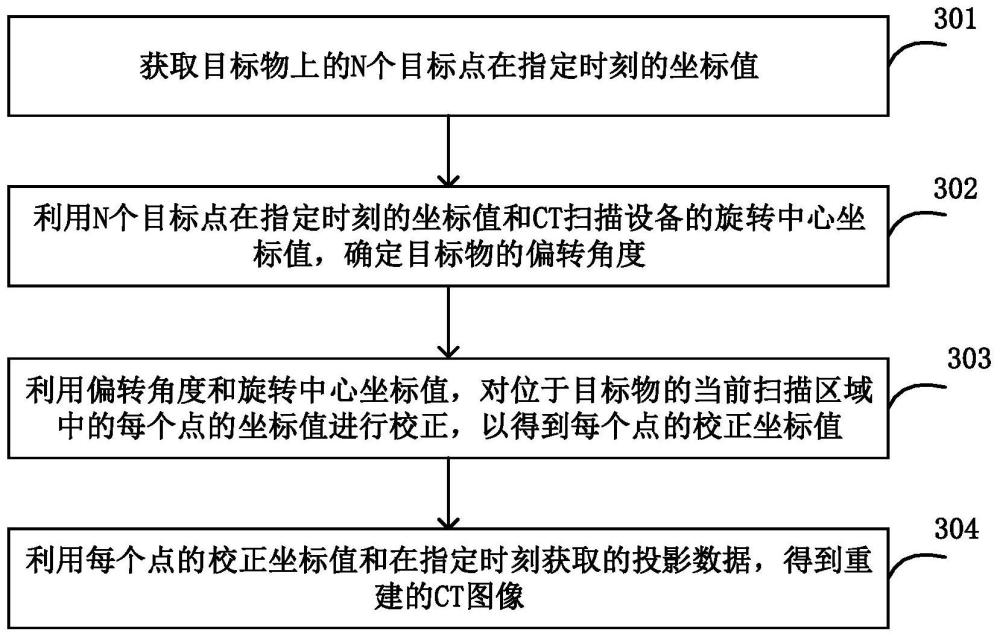
3、根据本公开实施例的第一方面,提供一种ct图像重建方法,包括:获取目标物上的n个目标点在指定时刻的坐标值,n为大于1的自然数,其中所述目标物为在ct扫描设备中进行ct扫描的物体;利用所述n个目标点在所述指定时刻的坐标值和所述ct扫描设备的旋转中心坐标值,确定所述目标物的偏转角度;利用所述偏转角度和所述旋转中心坐标值,对位于所述目标物的当前扫描区域中的每个点的坐标值进行校正,以得到所述每个点的校正坐标值;利用所述每个点的校正坐标值和在所述指定时刻获取的投影数据,得到重建的ct图像。
4、在一些实施例中,确定所述目标物的偏转角度包括:在n等于2的情况下,利用所述目标物上的两个目标点在所述指定时刻的坐标值和所述旋转中心坐标值,得到所述目标物的偏转角度。
5、在一些实施例中,所述目标物的偏转角度为第一角度参数与第二角度参数的平均值,其中所述第一角度参数由所述两个目标点中的第一目标点在所述指定时刻的坐标值中的x轴坐标值和y轴坐标值、所述旋转中心坐标值中的x轴坐标值和y轴坐标值确定,所述第二角度参数由所述两个目标点中的第二目标点在所述指定时刻的坐标值中的x轴坐标值和y轴坐标值、所述旋转中心坐标值中的x轴坐标值和y轴坐标值确定。
6、在一些实施例中,所述第一角度参数为第一差值与第二差值的比值的反正切函数值,所述第一差值为所述第一目标点在所述指定时刻的坐标值中的y轴坐标值与所述旋转中心坐标值的y轴坐标值的差值,所述第二差值为所述第一目标点在所述指定时刻的坐标值中的x轴坐标值与所述旋转中心坐标值的x轴坐标值的差值;所述第二角度参数为第三差值与第四差值的比值的反正切函数值,所述第三差值为所述第二目标点在所述指定时刻的坐标值中的y轴坐标值与所述旋转中心坐标值的y轴坐标值的差值,所述第四差值为所述第二目标点在所述指定时刻的坐标值中的x轴坐标值与所述旋转中心坐标值的x轴坐标值的差值。
7、在一些实施例中,确定所述目标物的偏转角度包括:在n大于2的情况下,利用所述n个目标点生成互不相同的k个集合,k为大于1的自然数,其中每个集合包括所述n个目标点中的两个目标点;利用第i个集合中的两个目标点在所述指定时刻的坐标值和所述ct扫描设备的旋转中心坐标值,得到第i个偏转角度,1≤i≤k;利用得到的k个偏转角度生成所述目标物的偏转角度。
8、在一些实施例中,所述第i个偏转角度为第三角度参数与第四角度参数的平均值,其中所述第三角度参数由所述第i个集合中的两个目标点中的第一目标点在所述指定时刻的坐标值中的x轴坐标值和y轴坐标值、所述旋转中心坐标值中的x轴坐标值和y轴坐标值确定,所述第四角度参数由所述第i个集合中的两个目标点中的第二目标点在所述指定时刻的坐标值中的x轴坐标值和y轴坐标值、所述旋转中心坐标值中的x轴坐标值和y轴坐标值确定。
9、在一些实施例中,所述第三角度参数为第五差值与第六差值的比值的反正切函数值,所述第五差值为所述第一目标点在所述指定时刻的坐标值中的y轴坐标值与所述旋转中心坐标值的y轴坐标值的差值,所述第六差值为所述第一目标点在所述指定时刻的坐标值中的x轴坐标值与所述旋转中心坐标值的x轴坐标值的差值;所述第四角度参数为第七差值与第八差值的比值的反正切函数值,所述第七差值为所述第二目标点在所述指定时刻的坐标值中的y轴坐标值与所述旋转中心坐标值的y轴坐标值的差值,所述第八差值为所述第二目标点在所述指定时刻的坐标值中的x轴坐标值与所述旋转中心坐标值的x轴坐标值的差值。
10、在一些实施例中,所述目标物的偏转角度为所述k个偏转角度的平均值,或所述k个偏转角度的中位数。
11、在一些实施例中,所述每个点的校正坐标值中的x轴坐标值由第一校正参数与第二校正参数的差值确定,所述第一校正参数由所述每个点的坐标值中的x轴坐标值、所述旋转中心坐标值的x轴坐标值和所述偏转角度的余弦值确定,所述第二校正参数由所述每个点的坐标值中的y轴坐标值、所述旋转中心坐标值的y轴坐标值和所述偏转角度的正弦值确定;所述每个点的校正坐标值中的y轴坐标值由第三校正参数与第四校正参数的和值确定,所述第三校正参数由所述每个点的坐标值中的x轴坐标值、所述旋转中心坐标值的x轴坐标值和所述偏转角度的正弦值确定,所述第四校正参数由所述每个点的坐标值中的y轴坐标值、所述旋转中心坐标值的y轴坐标值和所述偏转角度的余弦值确定。
12、在一些实施例中,所述第一校正参数为所述每个点的坐标值中的x轴坐标值与所述旋转中心坐标值的x轴坐标值的差值与所述偏转角度的余弦值的乘积;所述第二校正参数为所述每个点的坐标值中的y轴坐标值与所述旋转中心坐标值的y轴坐标值的差值与所述偏转角度的正弦值的乘积;所述第三校正参数为所述每个点的坐标值中的x轴坐标值与所述旋转中心坐标值的x轴坐标值的差值与所述偏转角度的正弦值的乘积;所述第四校正参数为所述每个点的坐标值中的y轴坐标值与所述旋转中心坐标值的y轴坐标值的差值与所述偏转角度的余弦值的乘积。
13、在一些实施例中,所述n个目标点中的第n个目标点在所述指定时刻的坐标值由与所述第n个目标点对应的第n个位置监控装置的坐标值、所述第n个位置监控装置与所述第n个目标点在所述指定时刻的距离、所述第n个位置监控装置与所述第n个目标点的连线在所述指定时刻与y轴的夹角确定,其中n个目标点和n个位置监控装置一一对应,1≤n≤n。
14、在一些实施例中,所述第n个目标点在所述指定时刻的坐标值中的y轴坐标值为所述第n个位置监控装置的坐标值中的y轴坐标值与第一乘积的差值,所述第一乘积为所述距离和所述夹角的余弦值的乘积。
15、在一些实施例中,在所述第n个位置监控装置的坐标值中的x轴坐标值小于等于0的情况下,第n个目标点在所述指定时刻的坐标值中的x坐标值为所述第n个位置监控装置的坐标值中的x轴坐标值与第二乘积的和值,所述第二乘积为所述距离和所述夹角的正弦值的乘积。
16、在一些实施例中,在所述第n个位置监控装置的坐标值中的x轴坐标值大于等于0的情况下,第n个目标点在所述指定时刻的坐标值中的x坐标值为所述第n个位置监控装置的坐标值中的x轴坐标值与所述第二乘积的差值。
17、根据本公开实施例的第二方面,提供一种ct图像重建装置,包括:第一处理模块,被配置为获取目标物上的n个目标点在指定时刻的坐标值,n为大于1的自然数,其中所述目标物为在ct扫描设备中进行ct扫描的物体;第二处理模块,被配置为利用所述n个目标点在所述指定时刻的坐标值和所述ct扫描设备的旋转中心坐标值,确定所述目标物的偏转角度;第三处理模块,被配置为利用所述偏转角度和所述旋转中心坐标值,对位于所述目标物的当前扫描区域中的每个点的坐标值进行校正,以得到所述每个点的校正坐标值;第四处理模块,被配置为利用所述每个点的校正坐标值和在所述指定时刻获取的投影数据,得到重建的ct图像。
18、根据本公开实施例的第三方面,提供一种ct图像重建装置,包括:存储器;处理器,耦合到存储器,处理器被配置为基于存储器存储的指令执行实现如上述任一实施例所述的方法。
19、根据本公开实施例的第四方面,提供一种ct图像重建系统,包括:如上述任一实施例所述的ct图像重建装置;ct扫描设备,被配置为对目标物进行ct扫描,并将获取的投影数据发送给所述ct图像重建装置;与所述目标物上的n个目标点一一对应的n个位置监控装置,n为大于1的自然数,所述n个位置监控装置中的每个位置监控装置被配置为检测所述每个位置监控装置与对应的目标点在所述指定时刻的距离,以及每个位置监控装置与对应的目标点的连线与y轴的夹角。
20、根据本公开实施例的第五方面,提供一种计算机可读存储介质,其中,计算机可读存储介质存储有计算机指令,指令被处理器执行时实现如上述任一实施例所述的方法。
21、根据本公开实施例的第六方面,提供一种计算机程序产品,包括计算机指令,其中所述计算机指令被处理器执行时实现如上述任一实施例所述的方法。
22、通过以下参照附图对本公开的示例性实施例的详细描述,本公开的其它特征及其优点将会变得清楚。
- 还没有人留言评论。精彩留言会获得点赞!