自动驾驶系统的训练方法、装置及电子设备与流程
本技术涉及自动驾驶,尤其涉及一种自动驾驶系统的训练方法、装置及电子设备。
背景技术:
1、自动驾驶,又称无人驾驶、电脑驾驶或轮式移动机器人,是依靠计算机与人工智能技术在没有人为操纵的情况下,完成完整、安全、有效的驾驶的一项前沿科技。然而无人驾驶也面临着许多挑战,比如恶劣的天气、复杂的交通环境等等,因此在某些场景下的表现可能无法匹敌人类驾驶员。为了解决这一问题,需要对自动驾驶系统进行更多的测试和迭代更新,以提高复杂场景下的处理能力。
2、然而,现有技术在训练自动驾驶系统时,通常是采用单一的影子模式来训练单一的虚拟驾驶员模型。采用这种方式,容易缺乏对不同驾驶场景、行为和决策过程之间相互作用的综合考虑,导致训练后的自动驾驶系统在面对实际复杂环境时适应性不足,而且容易忽视不同驾驶风格和决策过程在驾驶行为中的重要性,使得训练后的自动驾驶系统在面临现实世界中丰富多变的驾驶员习惯和需求时显得力不从心。因此,如何提高自动驾驶系统的适应性和鲁棒性,成为亟待解决的技术问题。
技术实现思路
1、本技术提供了一种自动驾驶系统的训练方法、装置及电子设备,以解决现有技术中通常采用单一的影子模式来训练单一的虚拟驾驶员模型,使得训练得到的自动驾驶系统的适应性和鲁棒性较差。
2、第一方面,本技术实施例提供了一种自动驾驶系统的训练方法,所述方法包括:
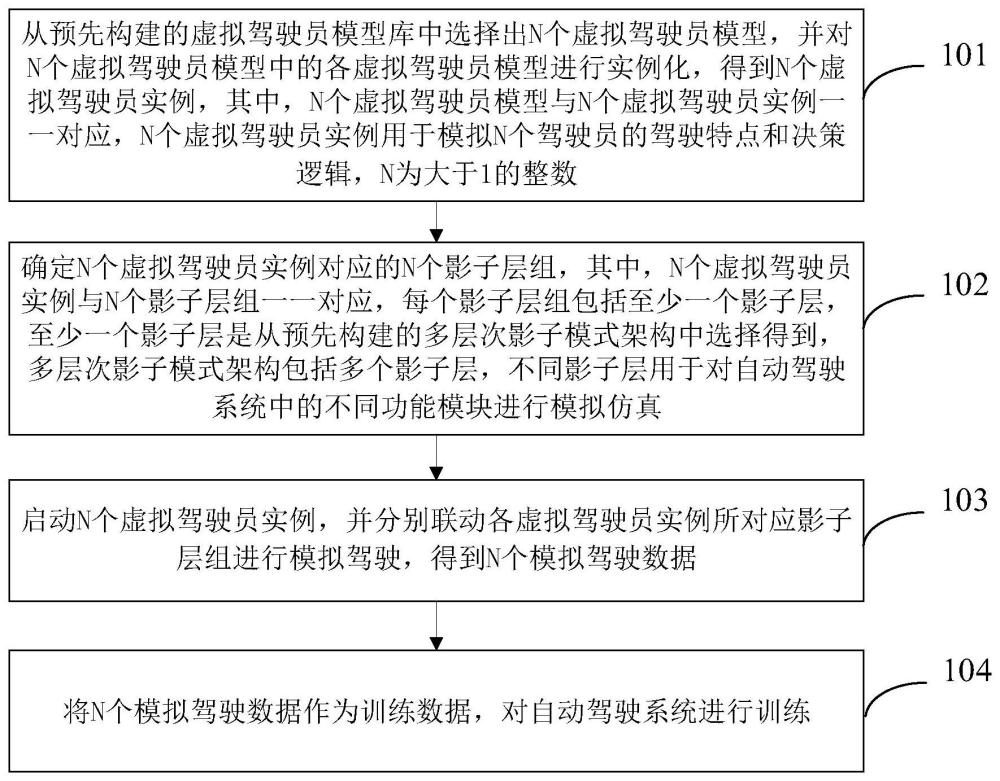
3、从预先构建的虚拟驾驶员模型库中选择出n个虚拟驾驶员模型,并对所述n个虚拟驾驶员模型中的各虚拟驾驶员模型进行实例化,得到n个虚拟驾驶员实例,其中,所述n个虚拟驾驶员模型与所述n个虚拟驾驶员实例一一对应,所述n个虚拟驾驶员实例用于模拟n个驾驶员的驾驶特点和决策逻辑,n为大于1的整数;
4、确定所述n个虚拟驾驶员实例对应的n个影子层组,其中,所述n个虚拟驾驶员实例与所述n个影子层组一一对应,每个影子层组包括至少一个影子层,所述至少一个影子层是从预先构建的多层次影子模式架构中选择得到,所述多层次影子模式架构包括多个影子层,不同影子层用于对自动驾驶系统中的不同功能模块进行模拟仿真;
5、启动所述n个虚拟驾驶员实例,并分别联动各虚拟驾驶员实例所对应影子层组进行模拟驾驶,得到n个模拟驾驶数据;
6、将所述n个模拟驾驶数据作为训练数据,对所述自动驾驶系统进行训练。
7、可选地,所述对所述n个虚拟驾驶员模型中的各虚拟驾驶员模型进行实例化,得到n个虚拟驾驶员实例,包括:
8、获取所述n个虚拟驾驶员模型中各虚拟驾驶员模型对应的模型类别和驾驶属性,其中,每个模型类别具有两个相互对立的驾驶属性;
9、根据所述模型类别和所述驾驶属性,确定所述n个虚拟驾驶员模型对应的n个初始化参数向量,其中,所述n个虚拟驾驶员模型与所述n个初始化参数向量一一对应,属于同一模型类别的两个虚拟驾驶员模型的初始化参数向量具有相同的参数类别,且同一所述参数类别对应的参数值不同;
10、利用所述n个初始化参数向量对所述n个虚拟驾驶员模型进行实例化,得到所述n个虚拟驾驶员实例。
11、可选地,在所述从预先构建的虚拟驾驶员模型库中选择出n个虚拟驾驶员模型之前,所述方法还包括:
12、构建m个虚拟驾驶员模型组,其中,所述m个虚拟驾驶员模型组中的每个虚拟驾驶员模型组对应一个模型类别,所述m个虚拟驾驶员模型组中的每个虚拟驾驶员模型组包括两个具有相同模型类别和不同驾驶属性的虚拟驾驶员模型,m为大于或等于1的整数,且m等于n/2;
13、按照预设命名规则对所述m个虚拟驾驶员模型组中的每个虚拟驾驶员模型进行命名,得到所述虚拟驾驶员模型库,其中,所述预设命名规则是基于各虚拟驾驶员模型组对应的模型类别和驾驶属性设置的。
14、可选地,所述分别联动各虚拟驾驶员实例所对应影子层组进行模拟驾驶,得到n个模拟驾驶数据,包括:
15、获取目标虚拟驾驶员实例所对应目标影子层组,其中,所述目标虚拟驾驶员实例为所述n个虚拟驾驶员实例中的任一实例,所述目标影子层组为所述n个影子层组中与所述目标虚拟驾驶员实例相对应的影子层组;
16、根据预设对应关系,确定出所述目标虚拟驾驶员实例对应的初始化参数向量在所述目标影子层组的各影子层的参数集合,其中,所述预设对应关系用于表征各虚拟驾驶员实例的初始化参数向量与各影子层的参数集合之间的对应关系;
17、对所述目标影子层组的各影子层对应的参数集合进行赋值;
18、联动赋值后的目标影子层组进行模拟驾驶,得到所述目标虚拟驾驶员实例对应的目标模拟驾驶数据。
19、可选地,所述将所述n个模拟驾驶数据作为训练数据,对所述自动驾驶系统进行训练,包括:
20、将所述n个模拟驾驶数据中的第一类模拟驾驶数据作为负样本,并将所述n个模拟驾驶数据中的第二类模拟驾驶数据作为正样本,其中,所述第一类模拟驾驶数据为具有负向驾驶属性的虚拟驾驶员模型所对应的模拟驾驶数据,所述第二类模拟驾驶数据为具有正向驾驶属性的虚拟驾驶员模型所对应的模拟驾驶数据;
21、利用所述负样本和所述正样本,对所述自动驾驶系统进行训练。
22、可选地,在所述将所述n个模拟驾驶数据作为训练数据,对所述自动驾驶系统进行训练之后,所述方法还包括:
23、对训练后的所述自动驾驶系统进行性能评估,得到性能评估结果,其中,所述性能评估结果包括准确率、召回率和f1分数中的至少一项;
24、根据所述性能评估结果,对所述n个虚拟驾驶员模型的模型参数进行调整。
25、可选地,在所述确定所述n个虚拟驾驶员实例对应的n个影子层组之前,所述方法还包括:
26、将所述自动驾驶系统按照功能进行划分,得到多个功能模块;
27、确定所述多个功能模块中各功能模型的输入数据和输出数据,并对各功能模型的输入接口和输出接口进行标准化;
28、构建所述多个功能模块中各功能模型对应的网络层,得到所述多层次影子模式架构,其中,每个功能模型对应的网络层对应一个影子层,不同功能模型对应的网络层之间的数据按照预设交互机制进行交互。
29、可选地,所述多层次影子模式架构包括环境场景层、基础驾驶层、思维决策层、应急反应层和人机交互层;
30、其中,所述环境场景层用于根据真实驾驶场景中的环境数据,模拟在多种不同路况和不同环境下的驾驶策略;
31、所述基础驾驶层用于根据实时道路信息和车辆状态,模拟基础驾驶决策,所述基础驾驶决策包括对车辆动力系统的控制和对转向系统的控制;
32、所述思维决策层用于根据所述基础驾驶层的输出数据、预设的交通规则数据库和实时道路信息,模拟高阶驾驶决策,其中,所述高阶驾驶决策包括确定安全的超车窗口、确定实施变道的最佳时间和位置和提前规避潜在风险区域中的至少一项;
33、所述应急反应层用于根据所述思维决策层的输出数据、突发事件信息和预设的交通规则数据库,模拟紧急情况下的驾驶决策,其中,所述紧急情况下的驾驶决策包括紧急制动、紧急避障和异常情况下的路径修正中的至少一项;
34、所述人机交互层用于根据用户交互数据,模拟人机交互决策。
35、第二方面,本技术实施例还提供了一种自动驾驶系统的训练装置,所述装置包括:
36、实例化模块,用于从预先构建的虚拟驾驶员模型库中选择出n个虚拟驾驶员模型,并对所述n个虚拟驾驶员模型中的各虚拟驾驶员模型进行实例化,得到n个虚拟驾驶员实例,其中,所述n个虚拟驾驶员模型与所述n个虚拟驾驶员实例一一对应,所述n个虚拟驾驶员实例用于模拟n个驾驶员的驾驶特点和决策逻辑,n为大于1的整数;
37、第一确定模块,用于确定所述n个虚拟驾驶员实例对应的n个影子层组,其中,所述n个虚拟驾驶员实例与所述n个影子层组一一对应,每个影子层组包括至少一个影子层,所述至少一个影子层是从预先构建的多层次影子模式架构中选择得到,所述多层次影子模式架构包括多个影子层,不同影子层用于对自动驾驶系统中的不同功能模块进行模拟仿真;
38、模拟驾驶模块,用于启动所述n个虚拟驾驶员实例,并分别联动各虚拟驾驶员实例所对应影子层组进行模拟驾驶,得到n个模拟驾驶数据;
39、训练模块,用于将所述n个模拟驾驶数据作为训练数据,对所述自动驾驶系统进行训练。
40、第三方面,本技术实施例还提供了一种电子设备,包括处理器、通信接口、存储器和通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信;
41、存储器,用于存放计算机程序;
42、处理器,用于执行存储器上所存放的程序时,实现第一方面中任一项所述的自动驾驶系统的训练方法。
43、本技术实施例提供的上述技术方案与现有技术相比具有如下优点:本技术实施例提供的该方法,通过从预先构建的虚拟驾驶员模型库中选择出n个虚拟驾驶员模型,并对所述n个虚拟驾驶员模型中的各虚拟驾驶员模型进行实例化,得到n个虚拟驾驶员实例,其中,所述n个虚拟驾驶员模型与所述n个虚拟驾驶员实例一一对应,所述n个虚拟驾驶员实例用于模拟n个驾驶员的驾驶特点和决策逻辑,n为大于1的整数;确定所述n个虚拟驾驶员实例对应的n个影子层组,其中,所述n个虚拟驾驶员实例与所述n个影子层组一一对应,每个影子层组包括至少一个影子层,所述至少一个影子层是从预先构建的多层次影子模式架构中选择得到,所述多层次影子模式架构包括多个影子层,不同影子层用于对自动驾驶系统中的不同功能模块进行模拟仿真;启动所述n个虚拟驾驶员实例,并分别联动各虚拟驾驶员实例所对应影子层组进行模拟驾驶,得到n个模拟驾驶数据;将所述n个模拟驾驶数据作为训练数据,对所述自动驾驶系统进行训练。通过上述方式,在训练多个不同的虚拟驾驶员实例时,可以根据训练侧重点选择不同的影子层组进行联动训练,因而可以对自动驾驶系统中的不同功能模块进行模拟仿真,实现对不同驾驶场景、行为和决策过程之间相互作用的综合考虑,使得训练后的自动驾驶系统在面对实际复杂环境时适应性有所提高;并且,还能够在同一时刻对多个虚拟驾驶员实例进行训练,得到多样化的模拟驾驶数据,使得基于多样化的模拟驾驶数据训练后的自动驾驶系统在面临现实世界中丰富多变的驾驶员习惯和需求时能处理得游刃有余,从而达到提高自动驾驶系统的适应性和鲁棒性的目的。
- 还没有人留言评论。精彩留言会获得点赞!